
схема и правильное подключение к трехфазному асинхронному электродвигателю, принципы использования
Частотные преобразователи используются для подключения различных электродвигателей и позволяют регулировать такие характеристики, как скорость вращения ротора, момент силы вала и защищают от перегрузок и перегрева. Также такие устройства дают возможность подключать трехфазное оборудование в однофазную систему без потери мощности и перегрева обмоток двигателя.
Разновидности частотных преобразователей
Современные частотные преобразователи различаются многообразием схем, которые можно сгруппировать в несколько категорий:
- Высоковольтные двухтрансформаторные
Принцип работы такого прибора заключается в последовательном преобразовании напряжения при помощи понижающего и повышающего трансформатора, преобразования частоты низковольтным преобразователем, а также сглаживание пиковых перенапряжений на выходе с помощью синусоидального фильтра. Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
- Тиристорные преобразователи
Такие устройства состоят из многоуровневых частотных преобразователей на основе тиристоров. Конструктивно они состоят из трансформатора (обеспечивающего понижение питающего напряжения), диодов (для выпрямления) и конденсаторов (для сглаживания). Также для уменьшения уровня высших гармоник применяют многопульсные схемы.
Тиристорные преобразователи имеют высокий КПД до 98 % и большой диапазон выходных частот 0-300 Гц, что для современного оборудования является положительной и востребованной характеристикой.
- Транзисторные частотные преобразователи
Такие частотные преобразователи являются высокотехнологичными устройствами, которые собираются на транзисторах различного типа. Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции. Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей. Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции. Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей. Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
Как подключить частотный преобразователь
Для подключения частотного преобразователя к оборудованию, прежде всего необходимо убедиться в том, что характеристики такого прибора подходят для работы с конкретным электродвигателем. Также важно, чтобы напряжение питающей сети позволяло использовать данный частотный преобразователь.
При установке и подключении ЧП необходимо, чтобы условия эксплуатации соответствовали классу защищённости от влаги и пыли, а также были выдержаны все расстояния от движущихся частей машин и механизмов, от людских проходов и электрооборудования и аппаратуры.
Схема подключения ПЧ
Частотные преобразователи бывают как для трехфазных сетей, так и для однофазных. При этом к однофазной сети также можно подключать и трехфазный частотный преобразователь по схеме «треугольник», который дополнительно оснащен специальным конденсаторным блоком (при этом значительно падает мощность и понижается КПД устройства). Подключение же трехфазного преобразователя в соответствующей сети производится по схеме «звезда».
Управление частотным преобразователем может осуществляться с использованием контакторов, встроенных в различные релейные схемы, микропроцессорных контроллеров и компьютерного оборудования, а также вручную. Поэтому при подключении автоматизированных систем требуется участие специалистов по наладке такого оборудования.
Обратите внимание! Частотный преобразователь может иметь дополнительные настройки, выполняемые с помощью DIP-переключателей, а также встроенным программным обеспечением.

Принцип подключения частотных преобразователей в целом одинаковый, но может несколько отличаться для разных моделей. Поэтому правильным решением будет перед подключением изучить инструкцию, сопоставить характеристики устройств и убедиться в том, что устройство подключается по схеме, предложенной производителем.
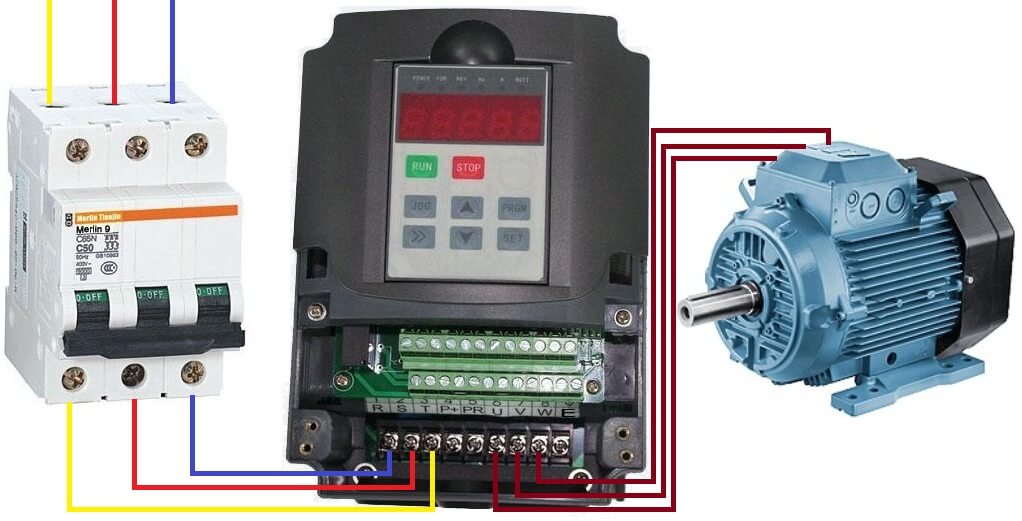
Для трехфазного электродвигателя
Для трехфазного электродвигателя принцип подключения следующий: к клеммным колодкам на выходе трехфазного частотного преобразователя подключаются фазные проводники к каждому выводу, а на вход подключаются фазы питающего напряжения. В данном случае всегда реализуется схема подключения «звезда» в двигателе. При подключении трехфазного двигателя через частотный преобразователь к однофазной сети применяют схему «треугольник».
Для однофазного электродвигателя
Для однофазного электродвигателя необходимо подключить фазный и нулевой проводник к преобразователю частоты, а обмотки двигателя подключаются к соответствующим клеммам на выходе частотного преобразователя. Например, обмотка L1 будет подключаться к клемме А преобразователя, обмотка L2 к клемме B, а общий провод к клемме C. Если применяется конденсаторный двигатель, то от частотного преобразователя фаза подключается к двигателю, а конденсатор обеспечивает сдвиг фаз.
Например, обмотка L1 будет подключаться к клемме А преобразователя, обмотка L2 к клемме B, а общий провод к клемме C. Если применяется конденсаторный двигатель, то от частотного преобразователя фаза подключается к двигателю, а конденсатор обеспечивает сдвиг фаз.
Во всех случаях, при подключении частотных преобразователей и электродвигателей, всегда следует применять устройства защиты: автоматические выключатели и УЗО, рассчитанные на высокие пусковые токи, а также обязательно подключать заземляющий проводник к корпусам устройств. Также важно обратить внимание на сечение проводников электрокабеля, которым будет производится подключение – сечение должно соответствовать параметрам подключаемого частотного преобразователя и нагрузки.
Частотник для однофазного электродвигателя, принцип действия
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента.
 Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу. - Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.

- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.

- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
Частотник для трехфазного электродвигателя своими руками (схема)
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя.
Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.
Назначение и принцип работы инвертора
Инвертор управляет скоростью вращения асинхронных электродвигателей, т. е. двигателей, преобразующих энергию электрическую в механическую. Полученное вращение приводными устройствами трансформируется в другой вид движения. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:
- сложность в использовании,
- высокую цену,
- низкое качество работы,
- недостаточный диапазон регулирования.
Многим известно, что использование частотных преобразователей для регулировки скорости является самым эффективным методом. Это устройство обеспечивает плавный пуск и остановку, а также осуществляет контроль всех процессов, которые происходят в двигателе. Риск возникновения аварийных ситуаций, при использовании преобразователя частоты, крайне незначителен.
Для обеспечения плавной регулировки и быстродействия разработана специальная схема частотного преобразователя. Его использование в значительной мере увеличивает время непрерывной работы трехфазного двигателя и экономит электроэнергию.
Регулировка скорости инвертором
Первоначально он изменяет поступающее из сети напряжение. Затем из преобразованного напряжения формирует трехфазное, необходимой амплитуды и частоты, которое подается на электродвигатель.
Диапазон регулировки достаточно широкий. Есть возможность крутить ротор двигателя и в обратном направлении. Во избежание его поломки необходимо учитывать паспортные данные, где указаны максимально допустимые обороты и мощность в кВт.
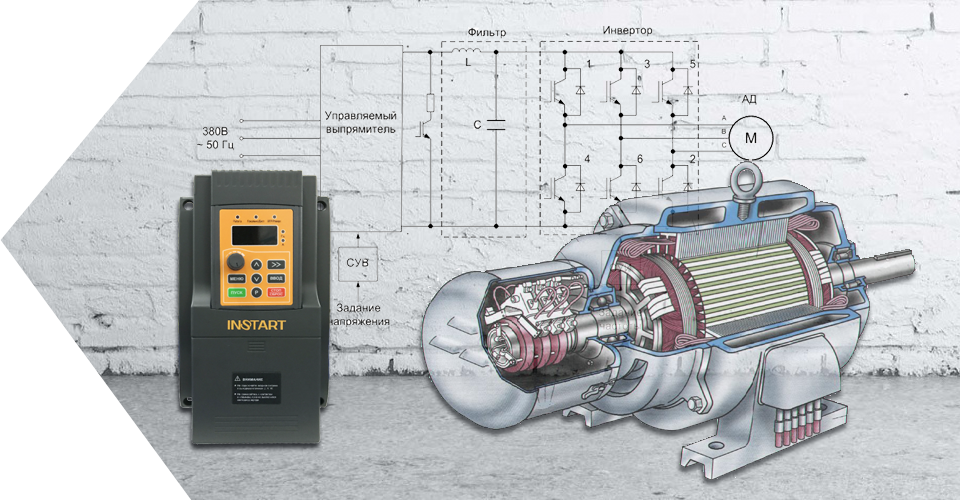
Составные части регулируемого привода
Ниже представлена схема преобразователя частоты.
Он состоит из 3 преобразующих звеньев:
- выпрямителя, формирующего напряжение постоянного тока при подключении к питающей электросети, который может быть управляемым или неуправляемым,
- фильтра, сглаживающего уже выпрямленное напряжение (для этого применяют конденсаторы),
- инвертора, формирующего нужную частоту напряжения, являющегося последним звеном перед электродвигателем.

Режимы управления
Частотники различают по видам управления:
- скалярный тип (отсутствие обратной связи),
- векторный тип (наличие обратной связи, или ее отсутствие).
При первом режиме подлежит управлению магнитное поле статора. В случае векторного режима управления учитывается взаимодействие магнитных полей ротора и статора, оптимизируется момент вращения при работе на разной скорости. Это является главным различием двух режимов.
Кроме этого, векторный способ более точен, эффективен. Однако в обслуживании — более затратен. Рассчитан он на специалистов с большим багажом знаний и навыков. Скалярный способ проще. Он применим там, где параметры на выходе не требуют точной регулировки.
Подключение инвертора «звезда — треугольник»
После приобретения инвертора по доступной цене возникает вопрос: как подключить его к двигателю своими руками? Прежде чем это сделать будет нелишним поставить обесточивающий автомат. В случае возникновения короткого замыкания хотя бы в одной фазе, вся система будет немедленно отключена.
В случае возникновения короткого замыкания хотя бы в одной фазе, вся система будет немедленно отключена.
Подключение преобразователя к электродвигателю можно осуществить по схемам «треугольник» и «звезда».
Если регулируемый привод однофазный, клеммы электродвигателя подключают по схеме «треугольник». В этом случае потерь мощности не происходит. Максимальная мощность такого частотника 3 кВт.
Трехфазные инверторы более совершенны. Они получают питание от промышленных трехфазных сетей. Подключаются по схеме «звезда».
Чтобы ограничить пусковой ток и снизить пусковой момент во время запуска электродвигателя мощностью более 5 кВт используют вариант переключения «звезда-треугольник».
При пуске напряжения на статор используется вариант «звезда». Когда скорость двигателя станет номинальной, питание переключается на схему «треугольник». Но такой способ применяется там, где существует возможность подключения по обеим схемам.
Но такой способ применяется там, где существует возможность подключения по обеим схемам.
Важно отметить, что в схеме «звезда-треугольник» резкие скачки токов неизбежны. В момент переключения на второй вариант скорость вращения резко снижается. Чтобы восстановить частоту оборотов, необходимо увеличить силу тока.
Наибольшей популярностью пользуются преобразователи для электродвигателей мощностью от 0,4 кВт до 7,5 кВт.
Инвертор своими руками
Наряду с выпуском промышленных инверторов многие изготавливают их своими руками. Особой сложности в этом нет. Такой частотник может преобразовать одну фазу в три. Электродвигатель с подобным преобразователем можно использовать в быту, тем более что мощность его не теряется.
Выпрямительный блок идет в схеме первым. Затем идут фильтрующие элементы, отсекающие переменную составляющую тока. Как правило, для изготовления таких инверторов используют IGBT-транзисторы. Цена всех составляющих частотника, изготовленного своими руками, намного меньше цены готового производственного изделия.
Частотники подобного типа пригодны для электродвигателей мощностью от 0,1 кВт до 0,75 кВт
Использование современных инверторов
Преобразователи с большим успехом применяют в следующих областях:
- в системах водоснабжения, теплоснабжения для регулирования скорости насосов горячей и холодной воды,
- в машиностроении,
- в текстильной промышленности,
- в топливно-энергетической области,
- для скважинных и канализационных насосов,
- для автоматизации систем управления технологическими процессами.

Цены источников бесперебойного питания напрямую зависят от наличия в нем частотника. Они становятся «проводниками» в будущее. Благодаря им, малая энергетика станет наиболее развитой отраслью экономики.
Как правильно выбрать частотник для электродвигателя / Статьи и обзоры / Элек.ру
Сегодня купить преобразователь частоты достаточно просто. Зачастую, мы это делаем с помощью поисковых систем или звоним уже проверенным поставщикам. При этом нужно помнить, что правильный выбор оборудования — одна из самых важных задач для любого хозяйственного объекта! Учитывая все важные критерии и характеристики, вы приобретаете привод, будет работать с максимальной эффективностью.
- Мощность преобразователя частоты. Выбор необходимо делать с учетом номинального значения приводного электродвигателя с учетом перегрузочной способности. Для этого, необходимо знать тип перегрузок управляемого механизма: величину перегрузок, их длительность и частоту возникновения.

- Напряжение сети
- Регулирование частоты. Может быть установлен практически любой частотник, в случаях, если скорость снижается до 50 % от номинальной. Но если, необходимо обеспечить надежный рабочий процесс при близких к нулю частотах, тогда нужен специальный электродвигатель с возможностью работы при таких параметрах. Здесь, также важно отметить, способ охлаждения двигателя. В этих случаях важна защита электродвигателя по температуре.
- Способ управления двигателем. Управление рабочим процессом возможно как через местный пульт, так и дистанционный. Также, здесь должны учитываться передача данных по различным протоколам, которые позволят внедрить систему АСУ.
- Функциональные возможности. Частотный преобразователь должен иметь тот набор функций, который необходим для сочетания оптимальной цены и выполнения поставленных задач.
 Здесь важна ориентация для работы частотника: управление стандартными узлами (насосами, вентиляторами) или специальными (краны, рольганы, многодвигательные системы).
Здесь важна ориентация для работы частотника: управление стандартными узлами (насосами, вентиляторами) или специальными (краны, рольганы, многодвигательные системы). - Конструктивное исполнение. Исполнение частотного преобразователя должно соответствовать эксплуатируемым условиям. В этих случаях возможны исполнения для работы в агрессивных средах, влажных, пыльных и др.
Выбирая частотный преобразователь для потребностей предприятия, вы можете знать точную модель нужного оборудования и без каких-либо сложностей заказать его через интернет. Но мы, как надежный производитель частотных преобразователей частоты, рекомендуем обращаться за подбором частотников к профессионалам. Широкий модельный ряд преобразователей частоты «Триол» позволяет подобрать модель необходимой мощности с широким набором функциональных возможностей. На складе компании есть приводы стандартной комплектации, а также изготавливается оборудование под ваши индивидуальные требования.
Корпорация «Триол» — подбор оборудования на высшем уровне!
Корпорация «Триол»
Частотно-регулируемый электропривод
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.

- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.
-
В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Недостатки систем частотного регулируемого привода
- Создают сильные помехи, которые мешают другой электронике функционировать. Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
- Высокая стоимость ЧРП. Однако она окупится через 2-3 года.
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
Следует принять во внимание:- Мощность и разновидность асинхронного электродвигателя.

- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Как подключить частотный преобразователь к электродвигателю — основные этапы
Частотный преобразователь — это высокотехнологичный прибор с широкими возможностями. Подключение частотного преобразователя помогает автоматизировать различные производственные процессы, получить существенную экономию электроэнергии и заметно продлить ресурс оборудования.
Подключение частотного преобразователя помогает автоматизировать различные производственные процессы, получить существенную экономию электроэнергии и заметно продлить ресурс оборудования.
Микропроцессорная база и встроенные компьютерные технологии делают прибор очень гибким по функционалу. Выбор комбинаций огромен, но для начала частотный преобразователь необходимо правильно подключить и настроить.
Установка частотника
Ошибки при подключении двигателя через частотный преобразователь способны значительно снизить срок его жизни и даже вывести электропривод из строя при первом же запуске. Важным этапом ввода в эксплуатацию является выбор предполагаемого места установки преобразователя. Необходимо учитывать комплекс условий, в числе которых:
- Возможности питающей линии.
- Диапазон рабочих температур.
- Влажность.
- Вибрации.
- Наличие агрессивных сред (какой класс защиты IP требуется).

Частотник можно монтировать вдали от электродвигателя. Но есть нюансы с длиной кабеля. Чтобы избежать появления эффекта отраженной волны, перенапряжения и коронного заряда, длину питающего кабеля следует ограничить. При периоде ШИМ от 0,3 мс — не более 45 м, при ШИМ 0,1 мс — не более 16 м.
Если двигатель специально предназначен для работы совместно с преобразователем, то длина кабеля может быть любой. Например, двигатели, сертифицированные по стандарту NEMA Standart MG-1. Двигатель для ПЧ должен быть оснащен изоляцией класса F или выше, а также иметь фазовую изоляцию. Также, чтобы избежать нежелательных явлений при большой длине кабеля, можно установить сглаживающие реакторы и фильтры сразу после ПЧ и непосредственно перед электродвигателем.
Подключение частотного преобразователя к электродвигателю следует производить строго по инструкции производителя. Особенно внимательно нужно отнестись к подключению силовой части. Перед прибором необходимо установить автоматический выключатель, работающий с током ≥ номинальному потребляемому току электродвигателя. Входные клеммы должны быть подключены только к фазам питающей сети (заземление только к заземляющему контуру), а выходные клеммы — к питаемому электродвигателю. В компании «Веспер» разработаны наглядные схемы и даны подробные инструкции к каждой модели. Например, схема подключения частотного преобразователя «Веспер E4-8400»:
Перед прибором необходимо установить автоматический выключатель, работающий с током ≥ номинальному потребляемому току электродвигателя. Входные клеммы должны быть подключены только к фазам питающей сети (заземление только к заземляющему контуру), а выходные клеммы — к питаемому электродвигателю. В компании «Веспер» разработаны наглядные схемы и даны подробные инструкции к каждой модели. Например, схема подключения частотного преобразователя «Веспер E4-8400»: Сетевые технологии для управления
Настройка частотника и программирование режимов работы осуществляется непосредственно с панели управления, выносного пульта или, что наиболее удобно, с помощью компьютера. Операционное место может находиться за многие километры от ПЧ, для этого необходимо воспользоваться сетевыми технологиями.
Для совместной работы электродвигателя и системы автоматического управления используются различные протоколы передачи данных. Наибольшее распространение получил протокол связи Modbus с интерфейсом RS-485.h-l.png) Передача управляющего сигнала в линиях RS-485 осуществляется по проводу. Даже если сразу не требуется включать частотник в систему удаленного управления, на перспективу такой вариант подключения следует предусмотреть и заранее запланировать место, где удобнее проложить магистраль и подключиться к сети.
Передача управляющего сигнала в линиях RS-485 осуществляется по проводу. Даже если сразу не требуется включать частотник в систему удаленного управления, на перспективу такой вариант подключения следует предусмотреть и заранее запланировать место, где удобнее проложить магистраль и подключиться к сети.
ПЧ — органы управления
Преобразователи «Веспер» оборудованы панелью с информационным ЖК-дисплеем и набором для управления и проведения пусконаладки. В зависимости от модели ПЧ, дисплеи могут отличаться количеством строчек. На дисплей прибора можно выводить данные о текущем состоянии параметров.
Для большего удобства и реализации более сложных систем управления через аналоговые и дискретные (релейные, транзисторные) выходы можно подключить выносной ДУ-пульт. А через линию интерфейсной связи — ПК (ноутбук или стационарный).
Ноутбук можно использовать в режиме осциллографа — для наблюдения за изменениями параметральных величин в реальном времени. В таком случае также необходимо заранее подготовить место с изолированной поверхностью и предусмотреть возможность работы ноутбука от батареи.
В таком случае также необходимо заранее подготовить место с изолированной поверхностью и предусмотреть возможность работы ноутбука от батареи.
Настройка перед запуском
Частотные преобразователи — сложные компьютеризированные устройства со множеством функций и настроек. Чтобы облегчить и ускорить ввод прибора в эксплуатацию, на заводе уже проведены базовые настройки. При этом многие параметры «по умолчанию» могут быть оптимальными для решения поставленных задач.
В дополнение к базовым настройкам, преобразователи «Веспер» поддерживают функцию автонастройки — идентификационный пуск. В этом режиме ПЧ до запуска двигателя или уже у работающего двигателя автоматически определяет параметры обмоток.
Перед запуском также необходимо проверить и задать стартовый набор параметров:
- Характеристики управляемого двигателя — напряжение, мощность, рабочий диапазон частоты вращения (эти параметры можно посмотреть в технической документации или на шильдике двигателя).

- Канал задания — указать, из какого источника ПЧ следует брать задания (панель управления, дискретные/аналоговые выходы, удаленный интерфейс).
- Канал управления — указать, откуда будут поступать управляющие команды (запуск/остановка). В качестве управляющего канала можно выбрать: панель управления, дискретные/аналоговые выходы, удаленный интерфейс.
- Схема преобразования — если нет опыта, эту настройку лучше не менять, оставить по умолчанию.
Строго следуя инструкции и обладая базовыми знаниями, можно самостоятельно разобраться с тем, как подключить частотный преобразователь к электродвигателю. Но если нет желания или времени во все вникать — поручите это высококвалифицированным сотрудникам «Веспер». Они проведут пусконаладочные работы быстро и профессионально.
Видео
Вступительный фильм о типовых примерах применения преобразователей частоты Веспер. В видеоролике показаны преимущества использования частотно-регулируемого электропривода по отношению к другим типам приводов.h-l.png) Коротко представлена продукция нашей компании и география ее использования.
Коротко представлена продукция нашей компании и география ее использования.
ПРИВОДОВ С ПЕРЕМЕННОЙ ЧАСТОТОЙ. 1. Электроприводы с регулируемой частотой
1 ПРИВОДЫ С ПЕРЕМЕННОЙ ЧАСТОТОЙ ЧАСТЬ 1: ОБЩИЕ ПОЛОЖЕНИЯ 1.01 A. Раздел включает: 1. Приводы с регулируемой частотой B. Связанные разделы: 1. Раздел Основные требования к HVAC 2.Раздел Руководства BACS 3. Раздел 1.02 ОБЕСПЕЧЕНИЕ КАЧЕСТВА Автоматизация здания и система управления. A. Все приводы должны использовать технологию широтно-импульсной модуляции (ШИМ) с входами диодного моста и биполярными транзисторами с изолированным затвором (IGBT) в выходной секции, которые используют мягкое переключение. B. Все приводы должны иметь регулируемую несущую частоту, регулируемую от 0,75 до 15 кгц, чтобы устранить слышимый шум двигателя. Привод должен быть способен работать на максимальной несущей частоте без снижения номинального максимального тока или максимальной температуры окружающей среды привода.Если производитель привода требует снижения номинальных характеристик привода при работе на максимальной несущей частоте, то размер привода необходимо увеличить для компенсации. C. В спецификации привода должно быть четко указано, какой поставщик оборудования (приводимая нагрузка, двигатель, частотно-регулируемый привод) несет полную ответственность за координацию всех частей системы привода. D. При выборе привода следует учитывать множество факторов. Необходимо внимательно изучить мощность двигателя, а также крутящий момент. Убедитесь, что максимальная токовая нагрузка привода достаточна, или увеличьте размер привода, если необходимо, для более высоких инерционных нагрузок.E. Инженер должен обеспечить соответствие приложения привода рекомендациям, содержащимся в стандарте IEEE 519. Главный служебный вход в здание должен рассматриваться как точка общей связи (PCC) для установления пределов гармоник тока.
Привод должен быть способен работать на максимальной несущей частоте без снижения номинального максимального тока или максимальной температуры окружающей среды привода.Если производитель привода требует снижения номинальных характеристик привода при работе на максимальной несущей частоте, то размер привода необходимо увеличить для компенсации. C. В спецификации привода должно быть четко указано, какой поставщик оборудования (приводимая нагрузка, двигатель, частотно-регулируемый привод) несет полную ответственность за координацию всех частей системы привода. D. При выборе привода следует учитывать множество факторов. Необходимо внимательно изучить мощность двигателя, а также крутящий момент. Убедитесь, что максимальная токовая нагрузка привода достаточна, или увеличьте размер привода, если необходимо, для более высоких инерционных нагрузок.E. Инженер должен обеспечить соответствие приложения привода рекомендациям, содержащимся в стандарте IEEE 519. Главный служебный вход в здание должен рассматриваться как точка общей связи (PCC) для установления пределов гармоник тока.h-l.png) Общие гармонические искажения напряжения (THD) не должны превышать 5% в любой точке распределительной системы здания, за исключением отдельно производных систем, предназначенных для оборудования, генерирующего гармоники. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 1 из 8
Общие гармонические искажения напряжения (THD) не должны превышать 5% в любой точке распределительной системы здания, за исключением отдельно производных систем, предназначенных для оборудования, генерирующего гармоники. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 1 из 8
2 F.Проект должен включать определенные точки подключения и учитывать обязанности по завершению, программированию, интеграции и запуску. G. Рекомендации по проектированию включают: l. Подайте питание на привод непосредственно от главного распределительного щита здания или от питателя, предназначенного для механических нагрузок. Изолирующие трансформаторы или линейные реакторы могут быть рассмотрены в установках, где невозможно достичь пределов THD, как описано выше. Изолирующие трансформаторы или реакторы не должны находиться в цепи возбуждения при работе в режиме байпаса, за исключением случая, когда трансформатор необходим для изменения напряжения.2. Вся проводка управления должна быть экранированной, одинарной витой парой и проложена в отдельном кабелепроводе от силовой проводки. Все отдельные провода должны иметь маркировку на обоих концах. 3. В приложениях, в которых привод будет находиться на расстоянии более 100 футов кабеля от двигателя, инженер-проектировщик обязан согласовать с производителем привода и изготовителем двигателя, чтобы убедиться, что двигатель подходит для данного применения, или предоставить двигатель, защищающий фильтр du / dt на выходе привода для защиты двигателя.4. Укажите по одному полному комплекту запасных предохранителей для каждого привода. 5. Должна быть предоставлена заводская схема управления приводом (лестничная диаграмма) и перечень деталей (включая запасные части), которые должны быть прикреплены к внутренней части шкафа привода. 6. Перед отгрузкой приводы должны пройти полное функциональное испытание. Отчет об испытании не требуется, если он специально не запрашивается менеджером проекта Корнельского университета (отчет об испытании будет добавленной стоимостью проекта). 7. Двигатели, питаемые от частотно-регулируемых приводов, должны быть рассчитаны на работу от инвертора (VFD).
Все отдельные провода должны иметь маркировку на обоих концах. 3. В приложениях, в которых привод будет находиться на расстоянии более 100 футов кабеля от двигателя, инженер-проектировщик обязан согласовать с производителем привода и изготовителем двигателя, чтобы убедиться, что двигатель подходит для данного применения, или предоставить двигатель, защищающий фильтр du / dt на выходе привода для защиты двигателя.4. Укажите по одному полному комплекту запасных предохранителей для каждого привода. 5. Должна быть предоставлена заводская схема управления приводом (лестничная диаграмма) и перечень деталей (включая запасные части), которые должны быть прикреплены к внутренней части шкафа привода. 6. Перед отгрузкой приводы должны пройти полное функциональное испытание. Отчет об испытании не требуется, если он специально не запрашивается менеджером проекта Корнельского университета (отчет об испытании будет добавленной стоимостью проекта). 7. Двигатели, питаемые от частотно-регулируемых приводов, должны быть рассчитаны на работу от инвертора (VFD). При модернизации частотно-регулируемого привода на существующий двигатель потребуется замена двигателя, если двигатель не рассчитан на работу с инвертором.Новые и существующие двигатели, питаемые от частотно-регулируемых приводов, должны поставляться / модернизироваться с кольцами заземления вала двигателя AEGIS SGR. См. Стандартные базовые требования Cornell к HVAC, раздел 2.02C. 8. Для двигателей мощностью более 25 л. С. Инженер-конструктор должен рассмотреть и оценить необходимость дополнительных мер по смягчению влияния токов заземления, наведенных частотно-регулируемым приводом, включая, помимо прочего, использование экранированного кабеля частотно-регулируемого привода специальной конструкции, прокладку кабеля в Жесткий стальной кабелепровод и дополнительные защитные элементы двигателя.9. На ЧРП должна быть указана панель источника, схема и расположение комнаты. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 2 из 8
При модернизации частотно-регулируемого привода на существующий двигатель потребуется замена двигателя, если двигатель не рассчитан на работу с инвертором.Новые и существующие двигатели, питаемые от частотно-регулируемых приводов, должны поставляться / модернизироваться с кольцами заземления вала двигателя AEGIS SGR. См. Стандартные базовые требования Cornell к HVAC, раздел 2.02C. 8. Для двигателей мощностью более 25 л. С. Инженер-конструктор должен рассмотреть и оценить необходимость дополнительных мер по смягчению влияния токов заземления, наведенных частотно-регулируемым приводом, включая, помимо прочего, использование экранированного кабеля частотно-регулируемого привода специальной конструкции, прокладку кабеля в Жесткий стальной кабелепровод и дополнительные защитные элементы двигателя.9. На ЧРП должна быть указана панель источника, схема и расположение комнаты. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 2 из 8
3 10. Выключатели двигателя, расположенные на стороне нагрузки частотно-регулируемого привода, должны включать вспомогательные контакты, которые должны быть подключены обратно к частотно-регулируемому приводу, чтобы обеспечить отключение. частотно-регулируемого привода в случае размыкания выключателя. H. Подача и исполнительная документация должны включать: 1. Силовые трехпроводные и полные схемы логики / управления.2. Список всех заводских и местных значений уставок. 3. Адресация, последовательность операций, количество проводных подключений ввода / вывода к BACS, к системе пожарной сигнализации и конфигурация, загружаемая с клавиатуры или ПК. 4. Полное руководство по установке, эксплуатации, устранению неисправностей и техническому обслуживанию. ЧАСТЬ 2: ПРОДУКТЫ 2.01 ПЕРЕМЕННАЯ ЧАСТОТА ОБЕСПЕЧИВАЕТ ТРЕХФАЗНЫЕ ПРИЛОЖЕНИЯ A. Cornell имеет три классификации приложений приводов. Каждое приложение имеет определенный набор требований к элементам управления, дисплеям и обходам.Это следующие приложения: 1. Некритические нагрузки (допускаются длительные незапланированные отключения). 2. Стандартные нагрузки (можно отключить для планового обслуживания). 3. Критические нагрузки (отключение недопустимо, например, ЦТ, безопасность жизни).
частотно-регулируемого привода в случае размыкания выключателя. H. Подача и исполнительная документация должны включать: 1. Силовые трехпроводные и полные схемы логики / управления.2. Список всех заводских и местных значений уставок. 3. Адресация, последовательность операций, количество проводных подключений ввода / вывода к BACS, к системе пожарной сигнализации и конфигурация, загружаемая с клавиатуры или ПК. 4. Полное руководство по установке, эксплуатации, устранению неисправностей и техническому обслуживанию. ЧАСТЬ 2: ПРОДУКТЫ 2.01 ПЕРЕМЕННАЯ ЧАСТОТА ОБЕСПЕЧИВАЕТ ТРЕХФАЗНЫЕ ПРИЛОЖЕНИЯ A. Cornell имеет три классификации приложений приводов. Каждое приложение имеет определенный набор требований к элементам управления, дисплеям и обходам.Это следующие приложения: 1. Некритические нагрузки (допускаются длительные незапланированные отключения). 2. Стандартные нагрузки (можно отключить для планового обслуживания). 3. Критические нагрузки (отключение недопустимо, например, ЦТ, безопасность жизни). Критические типы разрабатываются по индивидуальному заказу. Инженер должен проконсультироваться с инженерно-техническими службами Корнельского университета (CU FE) перед тем, как продолжить, чтобы узнать подробности и подтвердить, какая классификация (-ы) применяется. B. Все частотно-регулируемые приводы должны включать в свои характеристики следующие эксплуатационные требования: 1.Автоматический перезапуск после переходного процесса в линии питания (повышенного или пониженного напряжения или потери мощности), когда линия питания возвращается в нормальное состояние. 2. Автоматический перезапуск после сбоя выбранного привода. Количество попыток перезапуска и время задержки между попытками должно регулироваться на приводе на ноль, один или два перезапуска. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 3 из 8
Критические типы разрабатываются по индивидуальному заказу. Инженер должен проконсультироваться с инженерно-техническими службами Корнельского университета (CU FE) перед тем, как продолжить, чтобы узнать подробности и подтвердить, какая классификация (-ы) применяется. B. Все частотно-регулируемые приводы должны включать в свои характеристики следующие эксплуатационные требования: 1.Автоматический перезапуск после переходного процесса в линии питания (повышенного или пониженного напряжения или потери мощности), когда линия питания возвращается в нормальное состояние. 2. Автоматический перезапуск после сбоя выбранного привода. Количество попыток перезапуска и время задержки между попытками должно регулироваться на приводе на ноль, один или два перезапуска. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 3 из 8
4 3. Внутреннее управление приводом должно быть полностью цифровым и программируемым без внешнего оборудования. 4. Автоматический / выключенный / ручной переключатель; ручное местное регулирование скорости; регулируемый предел тока, регулируемые скорости ускорения и замедления; дистанционный запуск / остановка для автоматического управления. Нет необходимости останавливать привод при переключении с дистанционного на местное управление скоростью. 5. Инженер определяет максимальные значения ускорения и замедления для приводимых нагрузок. При необходимости приводы будут увеличены по размеру или снабжены тормозами для удовлетворения этих требований. Только высокоинерционные вентиляторы паровых котлов требуют большей способности ускорения / замедления, чем могут предложить стандартные приводы. 6. Все приводы должны быть способны принимать внешние разрешающие контакты, такие как реле замораживания, предохранитель статического давления или концевой выключатель заслонки.Один набор внешних контактов должен обесточивать двигатель независимо от того, находится ли привод в автоматическом, ручном или байпасном режиме. Все приводы должны иметь возможность подавать команды на все доступные цифровые выходные контакты. Инженер также должен рассмотреть режим дымоудаления для привода, если он применим для конструкции здания. 7. Все приводы должны перезапускаться на лету в режиме выбегающей нагрузки.
Нет необходимости останавливать привод при переключении с дистанционного на местное управление скоростью. 5. Инженер определяет максимальные значения ускорения и замедления для приводимых нагрузок. При необходимости приводы будут увеличены по размеру или снабжены тормозами для удовлетворения этих требований. Только высокоинерционные вентиляторы паровых котлов требуют большей способности ускорения / замедления, чем могут предложить стандартные приводы. 6. Все приводы должны быть способны принимать внешние разрешающие контакты, такие как реле замораживания, предохранитель статического давления или концевой выключатель заслонки.Один набор внешних контактов должен обесточивать двигатель независимо от того, находится ли привод в автоматическом, ручном или байпасном режиме. Все приводы должны иметь возможность подавать команды на все доступные цифровые выходные контакты. Инженер также должен рассмотреть режим дымоудаления для привода, если он применим для конструкции здания. 7. Все приводы должны перезапускаться на лету в режиме выбегающей нагрузки. Для повторной синхронизации не требуется ток более 150%. Общее время после потери общей мощности в одну секунду для повторного применения полного ускоряющего момента должно составлять одну секунду или меньше.Технологические приводы и приводы с критической нагрузкой должны иметь возможность повторного приложения крутящего момента менее чем за 1/2 секунды после потери общей мощности в течение одной секунды. 8. Приводы должны иметь следующие расширенные возможности при 100% потере входной мощности: a. Критические нагрузки: две секунды на логические схемы и элементы управления, чтобы обеспечить повторное приложение крутящего момента на 1/2 секунды. Могут потребоваться выходные контакторы с механической фиксацией. 9. Преобразователи частоты должны иметь следующие байпасы: a. Стандартные нагрузки и некритические нагрузки Никакие обходные пути не допускаются, если это не разрешено CU FE.б. Критические нагрузки: элементы управления должны быть настроены так, чтобы система могла работать в режиме байпаса без повреждения оборудования, труб, воздуховодов и т.
Для повторной синхронизации не требуется ток более 150%. Общее время после потери общей мощности в одну секунду для повторного применения полного ускоряющего момента должно составлять одну секунду или меньше.Технологические приводы и приводы с критической нагрузкой должны иметь возможность повторного приложения крутящего момента менее чем за 1/2 секунды после потери общей мощности в течение одной секунды. 8. Приводы должны иметь следующие расширенные возможности при 100% потере входной мощности: a. Критические нагрузки: две секунды на логические схемы и элементы управления, чтобы обеспечить повторное приложение крутящего момента на 1/2 секунды. Могут потребоваться выходные контакторы с механической фиксацией. 9. Преобразователи частоты должны иметь следующие байпасы: a. Стандартные нагрузки и некритические нагрузки Никакие обходные пути не допускаются, если это не разрешено CU FE.б. Критические нагрузки: элементы управления должны быть настроены так, чтобы система могла работать в режиме байпаса без повреждения оборудования, труб, воздуховодов и т. Д. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 4 из 8
Д. ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 4 из 8
5 Байпасы должны подключаться удаленно и локально управляемый с помощью магнитного переключателя на байпас. Световые индикаторы должны быть предусмотрены для всех функций. Требуется сервисное обслуживание и эксплуатационные испытания привода при работе на байпасе. Необходимо обеспечить переключение мощности управления и входной мощности привода.Для этой функции требуется байпас, который физически изолирован и изолирован от секции привода. Секция привода и байпас должны иметь отдельные предохранители. Управление байпасом и мощность управления должны быть полностью отделены и независимы от органов управления приводом. Контакторы с механической фиксацией могут потребоваться для выполнения требований повторного запуска. Защита от перегрузки байпаса может потребовать перегрузки типа 30 для нагрузок с высокоинерционным приводом, таких как большие вентиляторы. Все байпасы должны включать защиту от короткого замыкания, внесенную в список UL, и отдельные устройства защиты двигателя от перегрузки, внесенные в список UL. Инженер-проектировщик должен оценить, где чрезмерный пусковой ток двигателя окажет пагубное влияние на другое критическое оборудование или операции в здании. В этом случае обходы частотно-регулируемого привода не допускаются. 10. Электрические помехи: a. ЧРП должен быть спроектирован так, чтобы минимизировать гармонические искажения и радиочастотные помехи, наводимые в здании. Общее гармоническое искажение напряжения (THD) должно быть ограничено пятью (5%) процентами. Правила и положения FCC, часть 15, подраздел J, класс A, предлагают ограничения на уровни радиочастотных помех (RFI).При строительстве нового здания и реконструкции всего здания поставщик должен предоставить владельцу данные, показывающие уровни THD и RFI, создаваемые частотно-регулируемым приводом. Поставщик получит правильную информацию от инженера и предоставит моделирование системы распределения для проверки THD 5% по всему зданию. б. ЧРП, использующие технологию шестиимпульсного преобразования, обычно приемлемы для установки на объектах.
Инженер-проектировщик должен оценить, где чрезмерный пусковой ток двигателя окажет пагубное влияние на другое критическое оборудование или операции в здании. В этом случае обходы частотно-регулируемого привода не допускаются. 10. Электрические помехи: a. ЧРП должен быть спроектирован так, чтобы минимизировать гармонические искажения и радиочастотные помехи, наводимые в здании. Общее гармоническое искажение напряжения (THD) должно быть ограничено пятью (5%) процентами. Правила и положения FCC, часть 15, подраздел J, класс A, предлагают ограничения на уровни радиочастотных помех (RFI).При строительстве нового здания и реконструкции всего здания поставщик должен предоставить владельцу данные, показывающие уровни THD и RFI, создаваемые частотно-регулируемым приводом. Поставщик получит правильную информацию от инженера и предоставит моделирование системы распределения для проверки THD 5% по всему зданию. б. ЧРП, использующие технологию шестиимпульсного преобразования, обычно приемлемы для установки на объектах. Если на чувствительное исследовательское оборудование могут влиять гармонические искажения, рассмотрите возможность использования 12- или 18-импульсной технологии преобразования или пассивной фильтрации гармоник LRC, встроенной в привод.ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 5 из 8
Если на чувствительное исследовательское оборудование могут влиять гармонические искажения, рассмотрите возможность использования 12- или 18-импульсной технологии преобразования или пассивной фильтрации гармоник LRC, встроенной в привод.ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 5 из 8
6 c. Если указанные рекомендации IEEE и FCC не соблюдаются, в качестве опции можно рассмотреть отдельные специализированные фильтры гармоник. Тем не менее, производитель должен иметь в наличии необходимую фильтрацию для выполнения вышеуказанных требований. 11. Вложения а. Если не указано иное, приводы и байпас должны иметь следующие корпуса: Некритическая нагрузка: стандартный корпус Стандартная нагрузка: стандартный корпус Критическая нагрузка: NEMA 12, внешние радиаторы, охлаждение вентилятором b.Для некритических и стандартных нагрузок во влажных или жарких условиях могут потребоваться специальные шкафы. c. Шкафы должны иметь термическую защиту. Шкафы с вентиляторами должны иметь аварийную сигнализацию и отключение перегрева. Доступ к вентиляторам должен быть обеспечен, если он прикреплен к стене, без перемещения шкафа. 12. Рейтинг привода a. Все приводы должны работать в непрерывном режиме при минимальном 100% номинальном значении двигателя, указанном на паспортной табличке, включая коэффициент эксплуатации. C. Все частотно-регулируемые приводы должны включать следующие требования к оборудованию: 1.Все входные и выходные параметры привода будут доступны с клавиатуры. 2. Дисплей клавиатуры должен быть конфигурируемым и настроенным на герц. 3. Индикация типа неисправности на передней панели. 4. Сухие контакты вспомогательного выхода (2 N / 0, 2 N / C каждый, номинальный ток 10 А, индуктивный при 120 В переменного тока) для индикации: работы привода, работы байпаса или для управляющих устройств, таких как открытие / закрытие заслонки. 5. Тестовая карта или модуль для поиска неисправностей привода (ей) в здании. 6. Изолированный повторитель входа скорости 4-20 мА и цепи обратной связи по скорости. ДАТА: 30.06.
Доступ к вентиляторам должен быть обеспечен, если он прикреплен к стене, без перемещения шкафа. 12. Рейтинг привода a. Все приводы должны работать в непрерывном режиме при минимальном 100% номинальном значении двигателя, указанном на паспортной табличке, включая коэффициент эксплуатации. C. Все частотно-регулируемые приводы должны включать следующие требования к оборудованию: 1.Все входные и выходные параметры привода будут доступны с клавиатуры. 2. Дисплей клавиатуры должен быть конфигурируемым и настроенным на герц. 3. Индикация типа неисправности на передней панели. 4. Сухие контакты вспомогательного выхода (2 N / 0, 2 N / C каждый, номинальный ток 10 А, индуктивный при 120 В переменного тока) для индикации: работы привода, работы байпаса или для управляющих устройств, таких как открытие / закрытие заслонки. 5. Тестовая карта или модуль для поиска неисправностей привода (ей) в здании. 6. Изолированный повторитель входа скорости 4-20 мА и цепи обратной связи по скорости. ДАТА: 30.06. 2015 ДАТА: 30.06.2015 Страница 6 из 8
2015 ДАТА: 30.06.2015 Страница 6 из 8
7 7.По окончании ввода в эксплуатацию к внутренней части секции управления приводом должна быть постоянно прикреплена полная заводская электрическая схема со всеми определенными местными уставками. 8. Совместимость для связи посредством последовательной связи с оборудованием BACS здания; Стандарт университета — BACnet через MS / TP. D. Частотно-регулируемые приводы должны включать в свои характеристики следующие защитные требования: 1. Отключение входа. 2. Защита от замыкания на землю. 3. Отключение по максимальному току на выходе. 4.Тепловая защита двигателя с возможностью RTD более 100 л.с. 5. Защита от останова. 6. Перегрев двигателя. 7. Отключение при пониженном напряжении. E. Заводское обслуживание — запуск и поддержка: 1. Услуги по запуску должны выполняться обученным на заводе техническим специалистом / инженером. 2. Заводской сервисный техник / инженер должен продемонстрировать, что блок частотно-регулируемого привода работает в соответствии с проектом и соответствует всем требуемым проектным параметрам, включая максимально допустимые гармонические искажения (для приводов мощностью более 10 л. с.). Это должно быть продемонстрировано к удовлетворению владельца до вступления в силу гарантийного срока.3. Местный сервисный офис должен быть укомплектован обученным на заводе техническим специалистом / инженерами в радиусе 100 миль от Итаки. 4. Обучение обслуживающего персонала Владельца на объектах Владельца должно проводиться сертифицированным заводским техником / инженером. F. Допустимые производители: 1. ABB 2. Yaskawa 3. Eaton / Cutler Hammer ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 7 из 8
с.). Это должно быть продемонстрировано к удовлетворению владельца до вступления в силу гарантийного срока.3. Местный сервисный офис должен быть укомплектован обученным на заводе техническим специалистом / инженерами в радиусе 100 миль от Итаки. 4. Обучение обслуживающего персонала Владельца на объектах Владельца должно проводиться сертифицированным заводским техником / инженером. F. Допустимые производители: 1. ABB 2. Yaskawa 3. Eaton / Cutler Hammer ДАТА: 30.06.2015 ДАТА: 30.06.2015 Страница 7 из 8
8 4. Square D 2.02 ПРИВОДЫ С ПЕРЕМЕННОЙ ЧАСТОТОЙ ОДНОФАЗНЫЕ ПРИЛОЖЕНИЯ A .Однофазные частотно-регулируемые приводы могут использоваться для обслуживания дробных (<1 / 2HP) нагрузок, таких как фанкойлы, циркуляционные насосы и т. Д. B. Это приложение обычно используется в проектах модернизации или реконструкции, устанавливаемых в качестве метода энергосбережения. C. Университет предпочитает двигатели постоянного тока с электронно-коммутируемым двигателем (ECM) с частотно-регулируемым приводом для максимальной эффективности. D. Если электродвигатели, обслуживаемые однофазными частотно-регулируемыми приводами, относятся к типу с экранированными полюсами (SP) или с постоянным разделенным конденсатором (PSC), изготовителем должен быть Bardac или Invertek, или утвержденный аналог.ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 8 из 8
D. Если электродвигатели, обслуживаемые однофазными частотно-регулируемыми приводами, относятся к типу с экранированными полюсами (SP) или с постоянным разделенным конденсатором (PSC), изготовителем должен быть Bardac или Invertek, или утвержденный аналог.ДАТА: 30.06.2015 ДАТА: 30.06.2015 Стр. 8 из 8
Применения частотно-регулируемого привода
Частотно-регулируемый привод (VFD) может использоваться во многих областях. Приводы с регулируемой частотой широко используются для управления скоростью двигателей переменного тока, таких как конвейерные системы, скорости нагнетателя, скорости насоса, скорости станков и других приложений, где требуется переменная скорость с переменным крутящим моментом.В некоторых приложениях, таких как регулирование скорости конвейера, частотно-регулируемый привод оснащен дистанционным потенциометром, который персонал может регулировать вручную, чтобы установить скорость конвейера.- Снижение затрат на обслуживание.Приводы с регулируемой скоростью по своей сути являются плавным пуском, что увеличивает срок службы двигателя и рычажного механизма.
- Насосы можно менять чаще, например, каждые 24 часа, что увеличивает срок службы оборудования.
- При отказе насоса автоматически запускается резервный насос с индикацией аварийной сигнализации.
- Пуск-останов и сброс насосов могут выполняться приводами с регулируемой скоростью.
- Дополнительный ручной селекторный переключатель отменяет последовательность автоматического переключения насосов.

- В приложениях, где требуется увеличенный поток, на временной основе, ведущий или первичный насос может оставаться на максимальном расходе с включенным вторым «резервным» насосом и изменяться в соответствии с требованиями системы.
Около 40% общей энергии, потребляемой крытыми бассейнами, потребляется фильтрующими и циркуляционными насосами, которые отвечают за поддержание чистоты воды в бассейне.
Эти насосы «рециркулируют» воду в бассейне, протягивая ее через ряд фильтров и бассейны для закачки химреагентов, прежде чем возвращать ее в бассейн.Скорость фильтрации (установленная государственными органами) предназначена для обеспечения соблюдения надлежащих стандартов гигиены.
Нагнетательные насосы существенно увеличивают давление в системе водоснабжения коммерческого здания, когда давление в водопроводной сети оказывается недостаточным. В большинстве многоэтажных жилых комплексов, гостиниц и т. Д. Требуются подкачивающие насосы для подачи необходимого давления в оконечные устройства, такие как душевые и ванные комнаты.
В большинстве многоэтажных жилых комплексов, гостиниц и т. Д. Требуются подкачивающие насосы для подачи необходимого давления в оконечные устройства, такие как душевые и ванные комнаты.VFD может быть добавлен к бустерным насосам в качестве альтернативы использованию клапанов регулирования давления. Это экономит электроэнергию и исключает ее стоимость и обслуживание. Экономия VFD может достигать 20% и более просто из-за коэффициента безопасности, использованного при проектировании системы. Если давление всасывания насоса меняется, завышение размера насоса, необходимого для работы с самым низким давлением всасывания, не ухудшает установку, когда давление всасывания увеличивается.
Мне тоже было бы любопытно, особенно с двигателями с постоянной скоростью.Насосы, которые проводят много времени в крайнем левом углу кривой при различных потребностях, могут рассмотреть возможность использования частотно-регулируемого привода (ЧРП).
 Если у вас есть фиксированная потребность или процесс (т. Е. Старое эмпирическое правило 80%), конденсаторы для коррекции коэффициента мощности могут сэкономить электричество на большом количестве двигателей или на большом двигателе и дешевле, чем у частотно-регулируемых приводов.
Если у вас есть фиксированная потребность или процесс (т. Е. Старое эмпирическое правило 80%), конденсаторы для коррекции коэффициента мощности могут сэкономить электричество на большом количестве двигателей или на большом двигателе и дешевле, чем у частотно-регулируемых приводов. Вы можете получить представление о производительности насоса обычно по оборудованию для регистрации давления, если оно оборудовано насосом с крутой кривой кривой. Если немного, то электрические пускатели большего размера могут быть оборудованы регистраторами ампер и вольтметров. Ампер = расход.Преимущества управления частотно-регулируемым приводом для систем с преобладанием трения хорошо задокументированы, поскольку мы как методы регистрации датчиков, указывающих нагрузку. Существует нехватка информации о фактических рабочих точках в полевых условиях.
 Можно ожидать, что даже простая система кондиционирования воздуха стоимостью несколько сотен фунтов потребляет электроэнергии на многие десятки тысяч фунтов в течение своего срока службы.Приводы с регулируемой частотой могут помочь значительно сэкономить энергию за счет управления скоростью двигателя.
Можно ожидать, что даже простая система кондиционирования воздуха стоимостью несколько сотен фунтов потребляет электроэнергии на многие десятки тысяч фунтов в течение своего срока службы.Приводы с регулируемой частотой могут помочь значительно сэкономить энергию за счет управления скоростью двигателя.Создание более тесных связей между этими двумя областями бизнеса — важная цель. Такие инструменты, как онлайн-калькуляторы окупаемости частотно-регулируемых приводов, будут в некоторой степени способствовать достижению этого; однако сами по себе они не дадут результата — также должна быть реальная поддержка со стороны самого бизнеса.
Преимущества использования частотно-регулируемых приводов:- Сокращение времени простоя, поскольку газовые турбины требуют частого обслуживания, в то время как частотно-регулируемые приводы и двигатели требуют минимального обслуживания.Это позволяет увеличить производство, снизить расходы на обслуживание и повысить производительность.

- Точный контроль скорости и управления процессом, позволяющий достичь наиболее оптимального баланса потока в установке.
- Более низкие затраты на энергию, поскольку частотно-регулируемый привод и двигатель имеют более высокий КПД, чем большинство газовых турбин, особенно при частичной нагрузке.
- Отсутствие выбросов CO 2 и NO X на рабочем месте и значительное снижение шума. Эта особенность часто делает электрические тягачи единственным выбором для применения вблизи городских районов или регионов с существующими проблемами качества воздуха.
- Независимо от температуры окружающей среды. При повышении температуры воздуха на входе газовые турбины вырабатывают меньше энергии, поскольку плотность воздуха снижается и меньше кислорода достигает камер сгорания. На частотно-регулируемые приводы и двигатели температура не влияет.
- Снижение затрат на капитальное оборудование, запасные части и техническое обслуживание.
- Срок поставки 9–12 месяцев, в зависимости от конструкции двигателя.
 По сравнению с механическим первичным двигателем, время выполнения которого может составлять 18 месяцев, это более короткое время выполнения заказа позволяет быстрее увеличить выручку от производства.
По сравнению с механическим первичным двигателем, время выполнения которого может составлять 18 месяцев, это более короткое время выполнения заказа позволяет быстрее увеличить выручку от производства.
Выбор частотно-регулируемого привода (ЧРП) для управления холодильным компрессором должен производиться с большой осторожностью, так как частотно-регулируемый привод, выбранный слишком маленького размера, может иметь некоторые недостатки. Этого можно избежать, используя программное обеспечение для выбора ЧРП. На основе процесса индивидуального выбора и квалификации частотно-регулируемого привода, подходящего для конкретного холодильного компрессора, может быть достигнута безопасная и энергосберегающая работа холодильного компрессора.
Опыт, накопленный в более чем 10 000 ЧРП в проектах охлаждения и кондиционирования, позволил составить список приоритетов для правильного выбора подходящего частотно-регулируемого привода.

Самый важный выбор, который необходимо сделать при выборе частотно-регулируемого привода, — это выбрать твердотельный частотно-регулируемый привод с нескользящей поверхностью. Любой такой ЧРП может предложить значительную экономию энергии за счет эффективного согласования потребляемой энергии с требованиями гидравлической нагрузки в любой данный момент.
Комбинация насос / регулирующий клапан обеспечивает плавный поток даже при очень малых отверстиях клапана, хотя в некоторых случаях требуется защита от низкого расхода. Однако при перекачивании с приводом от частотно-регулируемого привода поток не всегда бывает плавным на пониженных скоростях из-за насоса или частотно-регулируемого привода.

Для центробежного насоса с частотно-регулируемым приводом обычно предпочтительнее использовать крутящий момент для регулирования расхода. Это также соответствует будущим направлениям развития технологии частотно-регулируемых приводов.Система переменного расхода воздуха имеет три контура управления:
- Контур контроля температуры — клапан охлажденной воды регулируется для достижения желаемой температуры вне змеевика.
- Контур управления давлением — ЧРП регулируется для достижения желаемого статического давления в воздуховоде.
- Контур управления коробкой переменного объема воздуха — Клапан регулируемого объема воздуха модулируется для обеспечения требуемого воздушного потока, установленного контуром управления температурой.
: использованная мощность генератора 60 Гц и 50 Гц
Скорость и частота генератора пропорциональны
Выходная частота генератора — один из важных параметров, определяющих мощность генератора. Электрическая мощность генератора должна поддерживаться на фиксированной частоте, 50 Гц или 60 Гц, чтобы соответствовать выходной мощности стандартной электрической сети или номинальной частоте ваших приборов.
Электрическая мощность генератора должна поддерживаться на фиксированной частоте, 50 Гц или 60 Гц, чтобы соответствовать выходной мощности стандартной электрической сети или номинальной частоте ваших приборов. Частота обычно составляет 60 Гц в США и 50 Гц в Европе.Вы также можете встретить разные изолированные участки одной и той же сети, работающие на разных частотах. Затем становится важным изменить выходную частоту генератора, чтобы она соответствовала частоте электропитания приборов или сети, к которой подключен ваш генератор.
Изменение оборотов двигателя для изменения выходной частоты
Современные генераторы состоят из двигателя, напрямую подключенного к генератору переменного тока для производства электроэнергии. Один из наиболее распространенных способов изменения выходной частоты генератора — это изменение скорости вращения двигателя.Эти два фактора связаны согласно следующей формуле — Частота генератора (f) = Число оборотов двигателя в минуту (Н) * Число магнитных полюсов (P) / 120 И наоборот, P = 120 * f / N
Согласно приведенной выше формуле, двухполюсный генератор с выходной частотой 60 Гц имеет частоту вращения двигателя 3600 об / мин. Чтобы изменить выходную частоту на 50 Гц для той же конфигурации генератора, необходимо снизить частоту вращения двигателя до 3000 об / мин. Аналогичным образом, для 4-полюсного генератора частота вращения двигателя 1800 об / мин дает выходную мощность 60 Гц.Уменьшение частоты вращения двигателя до 1500 об / мин дает выходную частоту 50 Гц.
Чтобы изменить выходную частоту на 50 Гц для той же конфигурации генератора, необходимо снизить частоту вращения двигателя до 3000 об / мин. Аналогичным образом, для 4-полюсного генератора частота вращения двигателя 1800 об / мин дает выходную мощность 60 Гц.Уменьшение частоты вращения двигателя до 1500 об / мин дает выходную частоту 50 Гц.
В случае небольших или домашних генераторов вы можете изменить настройки оборотов двигателя, сделав несколько изменений на панели управления вашего устройства. Следуйте инструкциям ниже, чтобы изменить частоту вашего генератора с 60 Гц на 50 Гц:
- Запустите двигатель генератора и настройте частотомер на панели управления на 50 Гц
- Проверьте вольтметр переменного тока или потенциометр, в зависимости от ситуации, и снимите показания выходного напряжения генератора.Выходное напряжение уменьшается при уменьшении частоты и может быть ниже желаемого значения
- Отрегулируйте вольтметр переменного тока или потенциометр на панели управления, пока не получите желаемое выходное напряжение при 50 Гц.
- Сделав аналогичные изменения на панели управления, вы можете увеличить частоту с 50 Гц до 60 Гц.
- Если панель управления не отображает частоту, вам необходимо сначала подключить устройство, которое будет измерять частоту во время работы генератора, а затем изменять частоту вращения двигателя.
Блоки управления генератором осуществляют мониторинг и управление вашим блоком в реальном времени. Встроенные защитные функции автоматически отключают ваш генератор в случае превышения оборотов двигателя или очень низкой выходной частоты. Дополнительную информацию о функциях генератора см. В следующей статье «Как работают генераторы».
Преобразователи частоты
Если вы используете генератор с фиксированной скоростью, вы можете подключить к своему устройству преобразователь частоты.Преобразователь частоты — это комбинация выпрямителя и инвертора. Выпрямитель использует выходной переменный ток генератора (AC) для производства постоянного тока (DC). Затем инвертор преобразует это, чтобы произвести выход переменного тока желаемой частоты. Любое сопутствующее изменение напряжения связано с назначением устройства, а также зависит от приложения, для которого используется преобразователь частоты.
Затем инвертор преобразует это, чтобы произвести выход переменного тока желаемой частоты. Любое сопутствующее изменение напряжения связано с назначением устройства, а также зависит от приложения, для которого используется преобразователь частоты.
Традиционно преобразователи частоты, такие как роторные преобразователи и мотор-генераторные установки, изготавливались из электромеханических компонентов.С появлением твердотельной электроники они теперь построены как полностью электронные блоки.
Помимо изменения выходной частоты, эти блоки также используются для управления крутящим моментом и скоростью двигателей переменного тока. Преобразователи частоты также находят применение в аэрокосмической промышленности для преобразования частоты 50 Гц или 60 Гц в выходную мощность 400 Гц, которая используется в наземных силовых установках самолетов. Эти системы также используются для управления скоростью вентиляторов и насосов и других нагрузок с переменным крутящим моментом, работающих на переменной скорости.
Электронные генераторные установки с регулируемой скоростью
Существует особый класс генераторов, известных как генераторы с электронной регулируемой частотой вращения, в которых изменение скорости двигателя изменяет скорость генератора переменного тока для автоматического получения выходного сигнала переменной частоты. Затем преобразователь частоты используется для исправления переменного выходного сигнала генератора, чтобы он соответствовал требуемой выходной частоте 50 Гц или 60 Гц.Использование этого устройства устраняет необходимость в приводе с регулируемой скоростью и трансформаторе.Недостатком этой технологии является то, что электронный компонент, помимо своей дороговизны, не подходит для использования в суровых условиях, в которых обычно работает генератор.
Важно отметить, что они отличаются от генераторов с регулируемой частотой вращения, которые имеют бесступенчатую трансмиссию (CVT), которая позволяет изменять частоту вращения двигателя, но поддерживает постоянную скорость генератора переменного тока. Это не изменяет выходную частоту, но позволяет генератору изменять выходную мощность генератора для удовлетворения требований переменной нагрузки.
Это не изменяет выходную частоту, но позволяет генератору изменять выходную мощность генератора для удовлетворения требований переменной нагрузки.
Анализ собственной частоты, радиальной силы и вибрации асинхронных двигателей, питаемых от инвертора с ШИМ
1. Введение
В последнее время, когда инженеры осознали важность наличия высококачественного рабочего места, влияние шума и вибрации, создаваемых Индукционные машины с инверторным питанием стали предметом изучения. Экономические соображения заставляют использовать менее активный материал.Поскольку корпус менее жесткий, машина становится более чувствительной к вибрациям и шуму. Меньшее использование железа в статоре приводит не только к более слабой структуре, но и к более высокому уровню поля, что вызывает более высокие магнитные силы, что приводит к повышенным вибрациям. Тогда первая цель этой работы — получить широкие знания о том, как уровни шума и вибрации, создаваемые асинхронным двигателем, меняются в разных рабочих условиях.
Электромагнитный шум возникает, когда собственные частоты вибрации асинхронных двигателей совпадают или близки к частотам, присутствующим в спектре электромагнитных сил.Чтобы избежать такого шума и вибрации, необходимо оценить амплитуду радиальных электромагнитных сил, а также собственные частоты конструкции. По этой причине было опубликовано несколько статей для анализа собственных частот, электромагнитной силы, вибрации и акустического шума. Для анализа собственных частот во многих работах анализировался сердечник статора без обмотки. Однако известно, что оценить модуль Юнга намотки сложно.Для анализа радиальной силы, вибрации и акустического шума было опубликовано несколько статей (Ishibashi et al., 2003, Shiohata et al., 1998, Munoz et al., 2003). Они дали амплитуды, а также частоты радиальной электромагнитной силы. Однако в основном они рассматривали случай, когда промах был 0. Ishibashi et al. не учитывали ток ротора (Ishibashi et al., 2003), а Munoz et al. указанные токи статора, рассчитанные MATLAB / Simulink в качестве входных данных, а не напряжения статора (Munoz et al. , 2003).
, 2003).
В этой статье исследуется вибрация асинхронных двигателей, питаемых от инвертора с широтно-импульсной модуляцией (ШИМ). Сначала мы анализируем собственные частоты статора, рассматривая обмотку статора, и сравниваем с измеренными. Затем мы анализируем радиальную электромагнитную силу с помощью двумерного (2D) нелинейного метода конечных элементов (МКЭ), который учитывает ток ротора и связан с уравнениями напряжения, и обсуждаем вычисленный результат с измеренной скоростью вибрации.Выясняем влияние скольжения, распределенной обмотки статора и инвертора ШИМ на радиальную силу. Более того, хорошо известно, что случайная ШИМ снижает акустический шум, излучаемый приводным двигателем инвертора (Trzynadlowski et al., 1994). Затем мы исследуем радиальную силу двигателя, питаемого двумя типами метода случайной ШИМ, а именно: ШИМ с произвольным положением импульса и ШИМ с произвольной частотой переключения.
2. Собственные частоты
2.1. Метод анализа собственных частот
Механическое уравнение для модели статора со свободными граничными условиями выражается как
[M] {x¨} + [K] {x} = {0} E1
где, {x} — смещение узла, [M] и [K] — глобальная матрица масс и матрица жесткости. В двумерном (2D) случае предполагается, что пластина имеет постоянную массовую плотность ρ, площадь A, однородную толщину h и движение, ограниченное плоскостью {x, y}. Матрица масс элементов выражается в виде матрицы 6 × 6
В двумерном (2D) случае предполагается, что пластина имеет постоянную массовую плотность ρ, площадь A, однородную толщину h и движение, ограниченное плоскостью {x, y}. Матрица масс элементов выражается в виде матрицы 6 × 6
Me = ρAh22 [201010020101102010010201101020010102] E2
Матрица жесткости элементов для плоской деформации определяется как
Ke = E (1 + ν) (1-2ν) [1 −νν0ν1 − ν000 (1−2ν) / 2] E3
где E — модуль Юнга, ν — коэффициент Пуассона.
Уравнение (1) приводит к проблеме собственных значений,
([K] −ωi2 [M]) {Φ} i = {0} E4
, где {Φ} i — собственный вектор, представляющий форму моды i -я собственная угловая частота ωi.Мы решаем (4) путем дискретизации статора на сетку конечных элементов и использования подпрограммы собственных значений, используемой в Международной библиотеке математики и статистики (IMSL).
При расчете собственных частот с помощью МКЭ наиболее важной, но неизвестной константой является модуль Юнга обмотки, который состоит из эмалированных проводов, изоляционных пленок и ноля. Itori et al. дал эквивалентный модуль Юнга намотки в пазу экспериментальным исследованием (Itori et al., 2002)
Itori et al. дал эквивалентный модуль Юнга намотки в пазу экспериментальным исследованием (Itori et al., 2002)
E = (0.0319S − 1.05) × 109 [Н / м2] E5
, где S — коэффициент пространства намотки.
2.2. Экспериментальные двигатели
В этой главе исследуются вибрационные характеристики двух двигателей, далее К-модель и М-модель, свойства и характеристики которых следующие. Для модели M, 1,5 кВт, 200 В, 50 Гц, 6,8 А, 4 полюса, количество пазов статора: 36, количество пазов ротора: 44 и одно смещение шага паза, см. Рис.1 (Mori et al. , 2005, 2005). Для модели K, 100 В, 50 Гц, 4 полюса, количество пазов статора: 24, количество пазов ротора: 34, обмотка статора: 66 витков, стержень ротора: алюминий, без перекоса, см. Рис.2 (IEEJ, 2002).
Рисунок 1.
Экспериментальный двигатель, М-модель.
2.3. Измерение собственных частот
Собственные частоты получаются путем измерения передаточной функции сердечника статора. На рис. 3 показана экспериментальная установка для измерения собственных частот. Пьезоэлектрический акселерометр PV08A размещен в верхней части статора и подключен к одному каналу усилителя заряда UV-06. К другому каналу подключен импульсный молот РН-51. Усилитель заряда подключается к анализатору сигналов SA-01A4, а затем к ПК, на котором установлено программное обеспечение для SA-01A4.
3 показана экспериментальная установка для измерения собственных частот. Пьезоэлектрический акселерометр PV08A размещен в верхней части статора и подключен к одному каналу усилителя заряда UV-06. К другому каналу подключен импульсный молот РН-51. Усилитель заряда подключается к анализатору сигналов SA-01A4, а затем к ПК, на котором установлено программное обеспечение для SA-01A4.
Передаточная функция измеряется путем удара по поверхности статора. Сначала измеряются собственные частоты сердечника статора только М-модели. Мы сняли со статора обмотки статора. В таблице 1 показаны четыре самые низкие измеренные собственные частоты.
Рисунок 2.
Экспериментальный двигатель, К-модель.
Рисунок 3.
Экспериментальная установка для измерения собственных частот.
| Режим |  5″ border-left=».5″ border-right=».5″ valign=»center» align=»center»> Частота [Гц] 5″ border-left=».5″ border-right=».5″ valign=»center» align=»center»> Частота [Гц] | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 1,325 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 1,337 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 |  5″ valign=»center» align=»center»> 5″ valign=»center» align=»center»> | 902 900 3,425 902 1.|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Режим | Частота [Гц] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 637 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5″ border-bottom=».5″ border-left=».5″ border-right=».5″ valign=»center» align=»center»> 3 5″ border-bottom=».5″ border-left=».5″ border-right=».5″ valign=»center» align=»center»> 3 | 1,770 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 На рис. 5 показаны режимы статора за счет каждой гармоники. Собственные частоты 1369 и 1425 Гц имеют режим 2, а 3446 и 3926 Гц — режим 3.
На рис. 5 показаны режимы статора за счет каждой гармоники. Собственные частоты 1369 и 1425 Гц имеют режим 2, а 3446 и 3926 Гц — режим 3.| Режим | Измеренный [Гц] | Расчетный [Гц] | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 1,325 | 1,369 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5″ valign=»center» align=»center»> 2 5″ valign=»center» align=»center»> 2 | 1,337 | 1,425 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 3,425 | 3,446 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 3,875 | 12 3,926 3,926||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5.
5. | Режим | Измерено [Гц] | Вычислено [Гц] |
| 2 |  5″ border-right=».5″ valign=»center» align=»center»> 637 5″ border-right=».5″ valign=»center» align=»center»> 637 | 587,0 |
| 3 | 13 902 902 902 902 | 902 902 9022,739,0 |
Таблица 4.
Сравнение расчетных собственных частот с измеренными для статора с обмоткой.
Рисунок 6.
Собственные формы колебаний статора с обмоткой.
Поскольку собственные частоты около 1 200 Гц генерируются ротором. В Таблице 4 показаны три наименьшие собственные частоты, за исключением около 1200 Гц, а также измеренные частоты. Показано, что расчетные собственные частоты немного меньше измеренных. Это связано с тем, что мы рассчитываем пространственный фактор обмотки, состоящей только из эмалированных проводов. Если учесть изоляционные пленки и исчезновение, фактор пространства будет больше. На рис. 7 показана самая низкая собственная частота при изменении пространственного фактора.Следовательно, если учесть изоляционные пленки и исчезновение, наименьшая собственная частота становится большой, то есть близкой к измеренной.
Это связано с тем, что мы рассчитываем пространственный фактор обмотки, состоящей только из эмалированных проводов. Если учесть изоляционные пленки и исчезновение, фактор пространства будет больше. На рис. 7 показана самая низкая собственная частота при изменении пространственного фактора.Следовательно, если учесть изоляционные пленки и исчезновение, наименьшая собственная частота становится большой, то есть близкой к измеренной.
3. Радиальная магнитная сила
3.1. Метод анализа радиальной магнитной силы
Моделирование электромагнитной силы реализовано с использованием 2D нелинейного метода конечных элементов, учитывающего ток ротора в сочетании с уравнениями напряжения. Поскольку мы рассматриваем силу и вибрацию в установившемся состоянии, скорость вращения предполагается постоянной.Тогда правительственные уравнения выглядят следующим образом:
Рисунок 7.
Отношение между наименьшей собственной частотой и пространственным фактором.
∂∂x (ν∂A∂x) + ∂∂y (ν∂A∂y) = — ∑kJ0k + σ∂A∂ t, E6
Vk = r ik + ld ikd t + dΦkd t, ( k = a, b, c) E7
где Φk = nSk∬SkAL dxdy, J0k = nSkik, E8
где, A, ν, J0, σ, V, i, r, l, Φ, n, S, Магнитный векторный потенциал Лара, реактивность, плотность тока, проводимость, фазное напряжение статора, ток статора, сопротивление обмотки статора, индуктивность рассеяния торцевой обмотки статора, потокосцепление, число витков обмотки статора, площадь поперечного сечения обмотки статора , и длина стека соответственно. Мы решаем уравнения (6) и (7), используя МКЭ с шаговым шагом. В случае, когда двигатель приводится в действие сетевым напряжением, временной шаг
Мы решаем уравнения (6) и (7), используя МКЭ с шаговым шагом. В случае, когда двигатель приводится в действие сетевым напряжением, временной шаг
Основы частотно-регулируемого привода (принцип работы)
Базовая конфигурация частотно-регулируемого привода (VFD)Базовая конфигурация частотно-регулируемого привода следующая.
Рис. 1 Базовая конфигурация частотно-регулируемого привода
Каждая часть частотно-регулируемого привода выполняет следующие функции.
Преобразователь: Схема для изменения коммерческого источника переменного тока на постоянный токПринцип работы преобразователя
Схема сглаживания: Схема для сглаживания пульсации, включенная в DC
Инвертор : Схема для переключения постоянного тока на переменный с переменной частотой
Цепь управления : Цепь для основного управления инверторной частью
Блок преобразователя состоит из следующих частей, как показано на следующем рисунке:
- Конвертер
- Схема управления пусковым током
- Схема сглаживания
Инжир.
 2 Часть преобразователя
2 Часть преобразователя Метод создания постоянного тока из переменного (коммерческого) источника питания
Преобразователь — это устройство для создания постоянного тока из источника переменного тока. См. Основной принцип работы с однофазным переменным током в качестве простейшего примера. На рис. 3 показан пример метода преобразования переменного тока в постоянный с использованием резистора для нагрузки вместо сглаживающего конденсатора.
Рис. 3 Выпрямительная схема
В элементах используются диоды. Эти диоды пропускают или не пропускают ток в зависимости от направления приложения напряжения, как показано на рис.4 шоу.
Рис. 4 Диод
Такая природа диода позволяет следующее: Когда напряжение переменного тока подается между A и B схемы, показанной на рис. 3, напряжение всегда прикладывается к нагрузке в том же направлении, что и в таблице 1.
Таблица 1 Напряжение, приложенное к нагрузке
То есть, переменный ток преобразуется в постоянный. (Преобразование переменного тока в постоянный обычно называется выпрямлением.)
(Преобразование переменного тока в постоянный обычно называется выпрямлением.)
Рис. 5 (Непрерывные формы сигналов в таблице 1)
Для трехфазного входа переменного тока объединение шести диодов для выпрямления всех волн источника питания переменного тока позволяет выходному напряжению, как показано на рис.6.
Рис.6 Форма волны преобразователя
Форма кривой входного тока при использовании конденсатора в качестве нагрузки
Принцип выпрямления объясняется резистором. Тем не менее, сглаживающая способность или фактически используется для нагрузки. Если используется сглаживающий конденсатор, формы волны входного тока становятся не синусоидальными, а искаженными, показанными на рисунке 7, поскольку переменное напряжение течет только тогда, когда оно превышает постоянное напряжение.
Рис.7 Принцип действия преобразователя
Схема управления пусковым током
Основной принцип выпрямления объясняется с помощью резистора.h-r.png) Однако на самом деле для нагрузки используется сглаживающий конденсатор. Конденсатор имеет свойство накапливать электричество. В момент подачи напряжения протекает большой бросок тока для зарядки конденсатора.
Однако на самом деле для нагрузки используется сглаживающий конденсатор. Конденсатор имеет свойство накапливать электричество. В момент подачи напряжения протекает большой бросок тока для зарядки конденсатора.
Чтобы предотвратить повреждение выпрямительных диодов этим большим пусковым током, выполните принудительное последовательное соединение с конденсаторами в течение приблизительно 0,05 секунды после включения питания, чтобы контролировать значение пускового тока. После этого закоротите оба конца этих резисторов с помощью магнитного переключателя, чтобы настроить схему с обходом резисторов.
Эта схема называется схемой управления пусковым током.
Рис.8 Пусковой ток
Принцип работы сглаживающей цепи
Схема сглаживания создает постоянное напряжение E 2 с небольшой пульсацией выпрямленного постоянного напряжения E 1 , используя сглаживающий конденсатор.
Рис.9 сглаженная форма сигнала постоянного тока
Принцип работы инвертора
Метод создания переменного тока из постоянного тока
Инвертор — это устройство для создания переменного тока из источника постоянного тока.См. Основной принцип с однофазным постоянным током в качестве простейшего примера. На рис. 10 показан пример метода преобразования постоянного тока в переменный с использованием лампы для нагрузки вместо двигателя.
Рис.10 Способ создания переменного тока
Когда четыре переключателя, от S1 до S4, подключены к источнику питания постоянного тока, S1 и S4, а также S2 и S4 соответственно попарно, и пары попеременно включаются и выключаются, переменный ток течет как показано на Рис. 11.
- Когда переключатели S1 и S4 включены, ток течет в лампе в направлении A.
- Когда переключатели S2 и S3 включены, ток течет в лампе в направлении B.
Способ изменения частоты
Частота изменяется путем изменения периода включения и выключения переключателей S1 — S4. Например, если переключатели S1 и S4 включены на 0,5 секунды, а переключатели S2 и S3 на 0.5 секунд, и эта операция повторяется, создается переменный ток с одним чередованием в секунду, то есть переменный ток с частотой 1 [Гц].
Рис. 12 Форма сигнала переменного тока 1 Гц
Обычно, если S1 / S4 и S2 / S3 соответственно включены на один и тот же период, а общее время для одного цикла составляет t0 секунд (с), частота f становится f = 1 / t0 [ Гц].
Рис.13 Частота
Способ изменения напряжения
Напряжение изменяется путем включения и выключения переключателей с более коротким периодом.Например, если переключатели S1 и S4 включены на половину периода, выходное напряжение будет E / 2, половиной напряжения постоянного тока E. Чтобы получить более высокое напряжение, включите на более длительный период. Чтобы получить более низкое напряжение, включите на более короткий период.
Рис.14 Форма сигнала напряжения E / 2
Рис. 15 Способ изменения напряжения
Этот метод управления обычно используется и называется ШИМ (широтно-импульсная модуляция), поскольку он контролирует ширину импульса. Частота, на которую нужно ссылаться для определения времени для ширины импульса, называется несущей частотой.
Трехфазный переменный ток
Принципиальная схема трехфазного инвертора и способ создания трехфазного переменного тока показаны на рисунках 16 и 17.
Рис.16 Базовая схема трехфазного преобразователя
Рис. 17 Способ создания трехфазного переменного тока
Чтобы получить трехфазный переменный ток, подключите переключатели S1 к S6 к цепи и одновременно включите / выключите все шесть переключателей в моменты времени, показанные на рис. 17. Если Порядок включения / выключения шести переключателей изменяется, порядок фаз изменяется между UV, VW и WU, а направление вращения может быть изменено.
Переключающий элемент
В качестве переключающего элемента в объяснении выше используется полупроводник, называемый IGBT (биполярный транзистор с изолированным затвором).
Схема V / F
Изменение скорости двигателя возможно путем изменения частоты, как показано в следующей формуле. При изменении выходной частоты преобразователя частоты необходимо изменить выходное напряжение.
Крутящий момент TM = K x Φ x I = K x (V / F) x IВыходной крутящий момент двигателя выражается как произведение магнитного потока внутри двигателя (Φ) на ток, протекающий в катушке (I).
Связь между магнитным потоком (Φ), напряжением, приложенным к двигателю (V), и частотой (F) выражается как Φ = V / F. Если напряжение фиксировано (например, 200 В) и уменьшается только частота, увеличенный магнитный поток (Φ) вызывает магнитное насыщение железного сердечника, а затем повышенный ток вызывает перегрев и выгорание.
Изменение напряжения, подаваемого на двигатель (V), и частоты (F) при постоянном их соотношении позволяет выходному крутящему моменту двигателя оставаться постоянным даже при изменении скорости двигателя.По этим двум причинам выходное напряжение должно контролироваться низким, когда выходная частота преобразователя частоты низкая, и высоким, когда частота высокая.
Это соотношение между выходной частотой и выходным напряжением называется V / F-шаблоном.
Рис.18 Схема V / F и выходной крутящий момент двигателя
Рекуперативный тормоз
Когда скорость двигателя превышает выходную частоту частотно-регулируемого привода (команда скорости от частотно-регулируемого привода), например, когда лифт выходит из строя, двигатель работает как генератор, а выработанная электроэнергия (энергия) возвращается в частотно-регулируемый привод.Этот статус называется регенерацией.
Когда электричество возвращается в преобразователь частоты, напряжение постоянного тока преобразователя частоты (рис. 19 E1) увеличивается. Если это напряжение постоянного тока превышает определенное указанное значение (370 В постоянного тока для класса 200 В), выпрямительные диоды или IGBT части привода переменной частоты выходят из строя. Чтобы предотвратить это, вставьте последовательно резистор и силовой конденсатор для переключающего элемента в цепь постоянного напряжения (между P и N), как показано на рис. 19. Это предотвращает повышение постоянного напряжения за счет включения силового транзистора для потребления ток как тепло, когда напряжение постоянного тока превышает определенное заданное значение.См. Рис. 20. Этот резистор называется рекуперативным тормозным резистором, а этот силовой конденсатор — рекуперативным тормозным конденсатором.
Рис.19 Рекуперативный тормозной контур
Рис.20 Напряжение постоянного тока (между P и N)
Для частотно-регулируемого привода большой мощности, которому требуется большой тормозной резистор рекуперативного торможения, используется система возврата мощности, которая возвращает рекуперативную энергию на сторону источника питания, чтобы предотвратить нагрев влияние на атмосферу.
Control
Разница между универсальным частотно-регулируемым приводом и векторным частотно-регулируемым приводом
Хотя одна и та же основная схема используется между частотно-регулируемым приводом общего назначения (VFD) и векторным частотно-регулируемым приводом, существуют следующие различия в общих чертах в зависимости от используемой схемы управления или наличия / отсутствия энкодера, что зависит от применен мотор.
Таблица. 2 Разница между универсальным и векторным частотно-регулируемыми приводами
| | Универсальный частотно-регулируемый привод | Вектор ЧРП |
| Выход | От 100 Вт до 560 кВт | От 1,5 до 250 кВт |
| Передаточное число трансмиссии (прибл.) | 1:10 до 1:20 до 200 | От 1: 1000 до 1: 1500 |
| Процент колебания скорости (%) | От 3 до 4% (1% или менее для расширенного векторного управления магнитным потоком и реального бессенсорного векторного управления) | 0.03% (колебания нагрузки от 0 до 100%) |
| Амплитудно-частотная характеристика | Низкий от 1 до 19 Гц | От 30 до 125 Гц |
| Ориентировочная частота включения / выключения | Прибл. 15 раз / мин. | Прибл. 100 раз / мин. |
| Точность позиционирования | Прибл.От 1 до 5 мм | Прибл. От 10 мкм до 100 мкм |
| Характеристики крутящего момента | Постоянный крутящий момент (крутящий момент уменьшен для базовой частоты или более) | Постоянный крутящий момент (от 0 до номинальной скорости) |
| Применяемый мотор | Двигатель общего назначения (Асинхронный двигатель) | Выделенный двигатель (двигатель с энкодером) |
Метод управления
Существует три основных метода управления частотно-регулируемым приводом: регулирование скорости для управления скоростью двигателя в основном с помощью аналогового напряжения, регулирование положения для управления скоростью вращения двигателя с помощью простых концевых выключателей, высокоточный энкодер и т. Д. И регулирование крутящего момента для управления двигателем. ток, протекающий в двигатель с постоянным значением крутящего момента.
Подробный отчет приводится ниже.
Регулировка скорости
1) Управление без обратной связи
Этот метод управления не обеспечивает обратной связи по скорости, как это принято в частотно-регулируемых приводах общего назначения.
Система команд представляет собой команду аналогового напряжения, которая используется во многих приложениях, таких как управление скоростью конвейера, управление количеством ветра вентилятора, управление количеством потока насоса и т. Д. Скольжение при номинальном крутящем моменте зависит от характеристик двигателя. Возможны колебания скорости примерно от 3 до 5%.Современные частотно-регулируемые приводы устойчивы к температурным дрейфам для цифрового управления, что позволяет устанавливать данные скорости внутренне и для цифровой команды (последовательность импульсов, параллельные данные и связь). Кроме того, доступны частотно-регулируемые приводы усовершенствованного векторного управления магнитным потоком или реального бессенсорного векторного управления с колебанием скорости 1% или меньше.
Этот метод управления скоростью работает почти для всех частотно-регулируемых приводов общего назначения.
2) Управление с обратной связью
Чтобы обеспечить изменение скорости двигателя, необходимо установить энкодер, который определяет фактическую скорость и передает ее обратно в схему управления.Этот метод называется замкнутым контуром управления.
Для определения скорости используются ТГ (тахогенератор), энкодер и т. Д. В наши дни в основном используются кодеры. Для управления с обратной связью аналоговое напряжение или ток также используется для команды скорости. Однако ввод последовательностей импульсов или использование цифрового входа обеспечивает высокоточное управление скоростью для операции вытяжки или операции непрерывного управления скоростью.
Контроль положения
Позиционное управление позволяет не только управлять скоростью двигателя, но и управлять остановом в целевом положении остановки.Существует множество методов управления: от простого метода остановки в заданном положении путем преобразования сигналов внешнего датчика в сигнал остановки до метода выполнения высокоточного позиционирования с помощью энкодера, установленного на двигателе, и до расширенного метода выполнения позиционирование к постоянно меняющимся целевым позициям остановки путем отслеживания или синхронизации.
1) Управление без обратной связи
Этот элемент управления используется в тех случаях, когда для остановки не требуется высокая точность. Двигатель замедляется до остановки по сигналам от концевых выключателей, установленных перед целевым положением остановки для команды замедления.Это самый простой и наиболее разумный метод, хотя колебания точек замедления влияют на точность положений остановки.
2) Управление с полузамкнутым контуром
Энкодер, установленный на двигателе, выполняет обратную связь. Например, электродвигатель, предназначенный для работы с вектором, работает на ввод команды на частотно-регулируемый векторный привод, когда обратная связь является обратной. В этот момент вычисляется команда скорости для обнуления разницы между величиной входной команды и величиной обратной связи для вращения двигателя.
3) Управление с полным замкнутым контуром
Это управление осуществляется посредством обратной связи от линейной шкалы или энкодера, установленного на стороне машины. Установка линейной шкалы или энкодера на конечную кромку станка обеспечивает высокую точность позиционирования без люфтов или механических системных ошибок. Вместо этого требуется повысить жесткость машины. Этот контроль иногда используется для станков, часть которых требует контроля высокой точности.
Контроль крутящего момента
Управление крутящим моментом указывает на управление крутящим моментом (током) на выходе двигателя, и его следует отличать от ограничения крутящего момента.Однако оба они доступны в зависимости от приложения. Следует выбрать наиболее подходящий метод. Управление крутящим моментом выполняет управление крутящим моментом (током) в зависимости от значения команды крутящего момента. Следовательно, скорость автоматически увеличивается, когда момент нагрузки меньше, и уменьшается, когда он больше. Если момент нагрузки равен значению команды крутящего момента, оба значения крутящего момента уравновешиваются, и скорость становится нулевой. То есть двигатель останавливается. Короче говоря, работает тот же принцип, что и перетягивание каната.
С другой стороны, предел крутящего момента используется, когда машина может быть повреждена из-за ненужного крутящего момента для управления положением или скоростью, когда остановка выполняется нажатием на машину или когда выполняется механическая блокировка. Для управления крутящим моментом необходимо обнаруживать и контролировать ток, протекающий в двигателе. Следовательно, управление крутящим моментом может поддерживаться векторным частотно-регулируемым приводом или частотно-регулируемым приводом реального бессенсорного векторного управления, которые выполняют определение тока.
1) Управление без обратной связи
Это управление используется для приложений, которые не требуют высокой точности крутящего момента, таких как ось разматывания или намотки. Аналоговая команда обычно используется для команды крутящего момента. Для этого контроля необходимо учитывать, что точность крутящего момента (температурный дрейф) изменяется в зависимости от температуры, и машины имеют потери.
2) Управление с обратной связью
Этот элемент управления используется для приложений, требующих высокой точности натяжения, таких как ось разматывания или наматывания (для бумаги, пленки и т. Д.). Этот контроль передает напряжение, приложенное к фактическим продуктам, на устройство контроля натяжения.
| |||||||||
| |||||||||
| |||||||||
| |||||||||
| |||||||||
| |||||||||
| |||||||||