
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.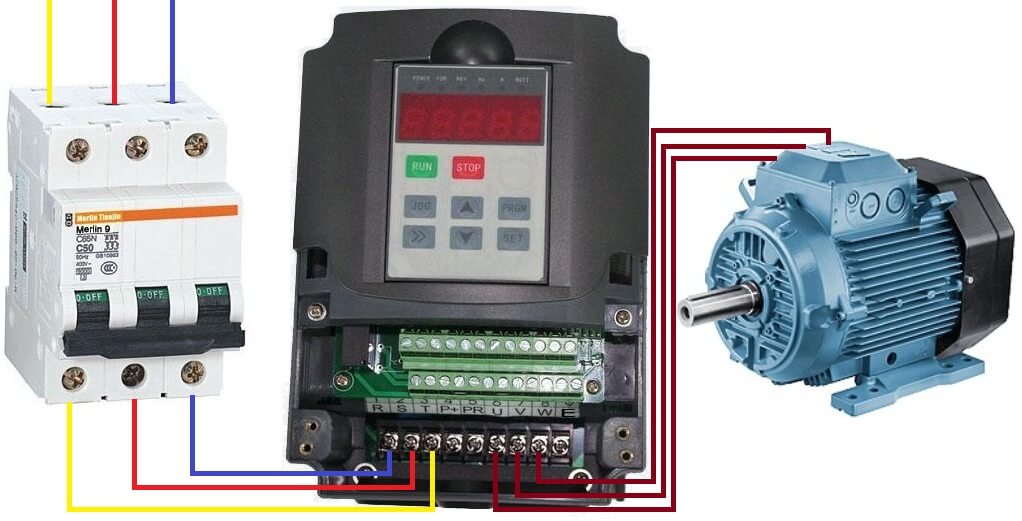
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.

- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.

- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора.
 В результате они преобразуются в синусоиду.
В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.

- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.

Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.
 д.;
д.; - Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Зачем нужен преобразователь частоты? — Статьи
Дата публикации: 27.06.2019
Что такое преобразователь частоты?
Преобразователь частоты — это устройство преобразования энергии. Преобразователь частоты преобразует переменный ток с фиксированной частотой и фиксированным напряжением в энергию с переменной частотой и переменным напряжением, используемую для управления скоростью вращения асинхронных двигателей.
Одной из основных функций преобразователя частоты в водных системах заключается в обеспечении экономии энергии. Благодаря контролю скорости насоса, а не регулированию потока с помощью дроссельных клапанов, экономия энергии может быть значительной. Например, снижение скорости на 20% может привести к экономии энергии на 50%. Помимо экономии энергии, значительно улучшается срок службы крыльчатки, уплотнителей и подшипников. Существуют различные виды преобразователей частоты с питание 220 В и 380 В. Более подробную информацию о работе однофазных частотных преобразователях можно прочитать в нашей статье.
Преимущества частотных преобразователей
В дополнение к энергосбережению и лучшему управлению процессом, они могут обеспечить другие преимущества:
• Преобразователь частоты может использоваться для контроля температуры процесса, давления или расхода без использования отдельного контроллера. Подходящие датчики и электроника используются для сопряжения приводимого оборудования с преобразователем частоты.
• Расходы на техническое обслуживание могут быть снижены, поскольку более низкие рабочие скорости приводят к увеличению срока службы подшипников и двигателей.
• Устранение дроссельных клапанов и демпферов также отменяет обслуживание этих устройств и всех связанных с ними средств управления.
• Устройство плавного пуска двигателя больше не требуется.
• Контролируемая скорость разгона в жидкостной системе может устранить проблемы гидравлического удара.
• Способность преобразователя частоты ограничивать крутящий момент до выбранного пользователем уровня может защитить приводное оборудование, которое не может выдерживать чрезмерный крутящий момент.
Анализ системы в целом
Поскольку процесс преобразования входящей мощности с одной частоты на другую приведет к некоторым потерям, экономия энергии всегда должна обеспечиваться за счет оптимизации производительности всей системы. Первым шагом в определении потенциала энергосбережения системы является тщательный анализ работы всей системы. Для обеспечения экономии энергии необходимы подробные знания о работе оборудования и требованиях к процессу. Кроме того, следует учитывать тип преобразователя частоты, предлагаемые функции и общую пригодность для применения.
Первым шагом в определении потенциала энергосбережения системы является тщательный анализ работы всей системы. Для обеспечения экономии энергии необходимы подробные знания о работе оборудования и требованиях к процессу. Кроме того, следует учитывать тип преобразователя частоты, предлагаемые функции и общую пригодность для применения.
Внутренняя конфигурация преобразователя частоты
Преобразователи частоты содержат три основных раздела:
- Цепь выпрямителя — состоит из диодов, SCR или биполярных транзисторов с изолированным затвором. Эти устройства преобразуют мощность линии переменного тока в постоянный ток.
- Шина постоянного тока — состоит из конденсаторов, которые фильтруют и хранят заряд постоянного тока.
- Инвертор — состоит из высоковольтных мощных транзисторов, которые преобразуют энергию постоянного тока в переменный выход переменного напряжения переменного тока, подаваемый на нагрузку.
Частотные преобразователи Danfoss также содержат мощный микропроцессор, который управляет схемой инвертора для получения почти чистого синусоидального напряжения переменной частоты, подаваемого на нагрузку. Микропроцессор также управляет конфигурациями ввода / вывода, настройками преобразователя частоты, состояниями неисправности и протоколами связи.
Cмотрите так же:
Разгон и торможение электродвигателя
Силовые опции для преобразователей частоты Danfoss
Задание фиксированных скоростей частотника VLT Micro Drive
Частотные преобразователи — структура, принцип работы
Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Частотные преобразователи – это устройства, предназначенные для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С с непосредственной связью (без промежуточного звена постоянного тока).
- Практически самый высокий КПД относительно других преобразователей (98,5% и выше).
- Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения.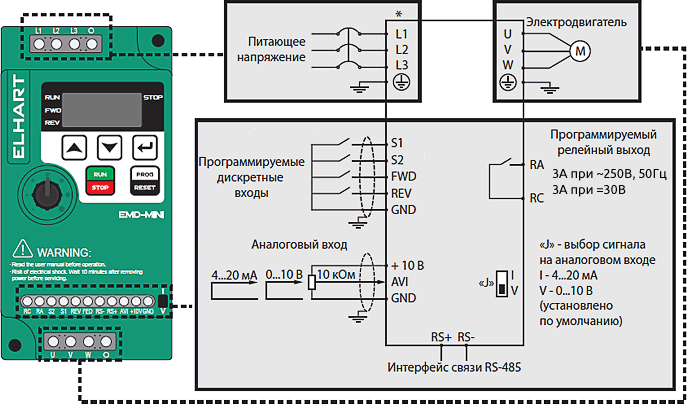 На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая не энергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
|
Bosch Rexroth KEB Control Techniques Parker Частотные преобразователи Широкий спектр качественных частотных преобразователей, услуги по подбору и модернизации станков и механизмов. Осуществляем официальные поставки по наилучшим ценам. Официальная поддержка клиентов и официальная гарантия. |
Motovario Wittenstein Alpha KEB Apex Мотор редукторы и редукторы Осуществляем поставки редукторов и мотор-редукторов разных типов от ведущих производителей. |
||
|
Абсолютные энкодеры Инкрементальные энкодеры Магнитные линейки Энкодеры, счетчики импульсов, токосъемники, индикаторы и пр. Поставляем официально все типы высокоэффективных энкодеров и индикаторов всех типов. Осуществляем оперативный подбор энкодеров под задачи заказчика. |
СТМЛ-1, ШМ-2, СТМ-2 СТМТ-2, MP-25, MTP-1 Системы линейного перемещения и модули линейного перемещения Разрабатываем и производим широкий спектр модулей и систем линейного перемещения. Производим системы линейных перемещений по индивидуальным заказам. Оказываем полный комплекс услуг по разработке и производству. |
||
Техника линейных перемещенийРельсовые направляющие SBC Цилиндрические направляющие Миниатюрные направляющие MID ШВП Техника и механические компоненты для систем линейных перемещений Разрабатываем и поставляем комплектующие для систем линейного перемещения. Производим системы линейных перемещений по индивидуальным проектам. |
Винтовые домкраты ZIMM Компоненты привода и трансмиссии ZIMM Домкраты и подъемно-транспортные механизмы Осуществляем поставки промышленных домкратов для производственных нужд, прецизионные домкраты. |
||
Системы управленияКонтроллеры Fatek ЧПУ Delta Tau ЧПУ «СервоКон 2000» Системы управления, панели операторов Цифровые системы управления, современные системы ЧПУ, HMI и пр. Оказываемо полный комплекс услуг для систем ЧПУ. Осуществляем разработки и модернизации собственной высокоэффективной системы ЧПУ «Сервокон». |
Гибкие кабель-каналы CPS Гофрозащита CPS Flex Системы защиты кабелей, кабель-каналы Широкий спектр систем защиты кабелей, высоконадежные кабель-каналы для промышленного производства, гибкие кабель-каналы для жестких условий эксплуатации или специального назначения. |
 Производим полный комплекс услуг по подбору редукторов, оказываем консультации для клиентов.
Производим полный комплекс услуг по подбору редукторов, оказываем консультации для клиентов. Предлагаем компоненты приводов и трансмиссии.
Предлагаем компоненты приводов и трансмиссии.НИОКР
Производим НИОКР, осуществляем услуги по разработке, проектированию, пуско-наладке широкого спектра механизмов, узлов, оборудования и станков. Осуществляем разработку, доработку, модернизацию и производство станков и механизмов, в том числе специального назначения (с уникальными характеристиками и/или функционалом) на базе собственного производства в России. Опыт работы более 15 лет.
НИОКР (что такое НИОКР?), определения, основные понятия, эффективность НИОКР.
НИОКР. Проекты НИОКР. Услуги НИОКР.
Заказать услуги НИОКР. Осуществление НИОКР.
НИОКР — Получить более подробную информацию о реализованных проектах.
Частотный преобразователь для электродвигателя — НТЦ Энерго-Ресурс
Недостатки механического регулирования оборотов ротора электродвигателяУправление крутящим моментом двигателя посредством механических устройств не снижает пусковой ток двигателя и обладает малым диапазоном регулирования. К тому же, механические устройства – вариаторы при работе испытывают значительные механические нагрузки и подвержены износу. Это обуславливает высокую себестоимость по сравнению с преобразователями частоты, которые лучше адаптированы под частые перегрузки.
К тому же, механические устройства – вариаторы при работе испытывают значительные механические нагрузки и подвержены износу. Это обуславливает высокую себестоимость по сравнению с преобразователями частоты, которые лучше адаптированы под частые перегрузки.
Частотные преобразователи подключаются непосредственно к двигателю, что позволяет исключить применение дополнительных механизмов. Также при необходимости преобразователь частоты может временно повысить скорость выше номинальной, в отличие от механического регулирования скорости, которое обычно ограничивает ее диапазон и сужает возможности в выборе режима функционирования электродвигателя.
Технические аспекты применения частотных преобразователейВ настоящее время, асинхронный электродвигатель стал основным устройством в большинстве электроприводов. Все чаще для управления им используется частотный преобразователь – инвертор с ШИМ регулированием. Такое управление дает массу преимуществ, но и создает некоторые проблемы выбора тех или иных технических решений. Попробуем разобраться в них более подробно.
Выбор мощности частотного преобразователя
При выборе мощности частотного преобразователя необходимо основываться не только на мощности электродвигателя, но и на номинальных токах и напряжениях преобразователя и двигателя. Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
Реальные приводы имеют много аспектов, которые могут привести к росту токовой нагрузке привода, например, при пуске. В общем случае, применение частотного привода позволяет снизить токовые и механические нагрузки за счет плавного пуска. Например, пусковой ток снижается с 600% до 100-150% от номинального.
Работа привода на пониженной скорости
Необходимо помнить, что хотя частотный преобразователь легко обеспечивает регулирование по скорости 10:1, но при работе двигателя на низких оборотах мощности собственного вентилятора может не хватать. Необходимо следить за температурой двигателя и обеспечить принудительную вентиляцию.
Необходимо следить за температурой двигателя и обеспечить принудительную вентиляцию.
Электромагнитная совместимость
Поскольку частотный преобразователь – мощный источник высокочастотных гармоник, то для подключения двигателей нужно использовать экранированный кабель минимальной длины. Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Питание от аварийного генератора
Плавный пуск, который обеспечивает частотный преобразователь позволяет снизить необходимую мощность генератора. Так как при таком пуске ток снижается в 4-6 раз, то в аналогичное число раз можно снизить мощность генератора. Но все равно, между генератором и приводом должен быть установлен контактор, управляемый от релейного выхода частотного привода. Это защищает частотный преобразователь от опасных перенапряжений.
Питание трехфазного преобразователя от однофазной сети
Трехфазные частотные преобразователи могут быть запитаны от однофазной сети, но при этом их выходной ток не должен превышать 50% от номинального.
Экономия электроэнергии и денег
Экономия происходит по нескольким причинам. Во-первых, за счет роста косинуса фи до значений 0.98, т.е. максимум мощности используется для совершения полезной работы, минимум уходит в потери. Во-вторых, близкий к этому коэффициент получается на всех режимах работы электродвигателя.
Без частотного преобразователя, асинхронные двигатели на малых нагрузках имеют косинус фи 0.3-0.4. В-третьих, нет необходимости в дополнительных механических регулировках (заслонках, дросселях, вентилях, тормозах и т.д.), все делается электронным образом. При таком устройстве регулирования, экономия может достигать 50%.
Синхронизация нескольких устройств
За счет дополнительных входов управления частотного привода можно синхронизировать процессы на конвейере или задавать соотношения изменения одних величин, в зависимости от других. Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
Защита сети от высших гармоник
Для дополнительной защиты, кроме коротких экранированных кабелей, используются сетевые дроссели и шунтирующие конденсаторы. Дроссель, кроме того, ограничивает бросок тока при включении.
Правильный выбор класса защиты
Для безотказной работы частотного привода необходим надежный теплоотвод. Если использовать высокие классы защиты, например IP 54 и выше, то трудно или дорого добиться такого теплоотвода. Поэтому, можно использовать отдельный шкаф с высоким классом защиты, куда ставить модули с меньшим классом и осуществлять общую вентиляцию и охлаждение.
Параллельное подключение электродвигателей к одному частотному преобразователю
С целью снижения затрат, можно использовать один частотный преобразователь для управления несколькими электродвигателями. Его мощность нужно выбирать с запасом 10-15% от суммарной мощности всех электродвигателей. При этом нужно минимизировать длины моторных кабелей и очень желательно ставить моторный дроссель.
Большинство частотных преобразователей не допускают отключение или подключение двигателей с помощью контакторов во время работы частотного привода. Это производится только через команду “стоп” привода.
Задание функции регулирования
Для получения максимальных показателей работы электропривода, таких как: коэффициент мощности, коэффициент полезного действия, перегрузочная способность, плавность регулирования, долговечность, нужно правильно выбирать соотношение между изменением рабочей частоты и напряжения на выходе частотного преобразователя.
Функция изменения напряжения зависит от характера момента нагрузки. При постоянном моменте, напряжение на статоре электродвигателя должно регулироваться пропорционально частоте (скалярное регулирование U/F = const). Для вентилятора, например, другое соотношение – U/F*F = const. Если увеличиваем частоту в 2 раза, то напряжение нужно увеличить в 4 (векторное регулирование). Есть приводы и с более сложными функциями регулирования.
Для вентилятора, например, другое соотношение – U/F*F = const. Если увеличиваем частоту в 2 раза, то напряжение нужно увеличить в 4 (векторное регулирование). Есть приводы и с более сложными функциями регулирования.
Преимущества использования регулируемого электропривода с частотным преобразователем
Кроме повышения КПД и энергосбережения такой электропривод позволяет получить новые качества управления. Это выражается в отказе от дополнительных механических устройств, создающих потери и снижающих надежность систем: тормозов, заслонок, дросселей, задвижек, регулирующих клапанов и т.д. Торможение, например, может быть осуществлено за счет обратного вращения электромагнитного поля в статоре электродвигателя. Меняя только функциональную зависимость между частотой и напряжением, мы получаем другой привод, не меняя ничего в механике.
Изучение документации
Следует заметить, что хотя частотные преобразователи похожи друг на друга и освоив один, легко разобраться с другим, тем не менее, необходимо тщательно изучать документацию. Некоторые производители накладывают ограничения на использование своей продукции, а при их нарушении снимают изделия с гарантии.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
ЧРПдля однофазных и трехфазных двигателей
Обзор частотно-регулируемых приводов
ЧРПуправляют выходной скоростью, крутящим моментом, направлением и мощностью подключенных электродвигателей путем изменения их потребляемой энергии, в частности напряжения и частоты. Они доступны в трех основных типах, каждый из которых отличается техникой, используемой для изменения подводимой энергии. Три типа :
- Широтно-импульсная модуляция (ШИМ) , которая изменяет выходную частоту, изменяя ширину формы волны выходного напряжения.

- Инвертор источника тока , который преобразует постоянный входной постоянный ток в переменный выходной. Переменный ток
- Инвертор источника напряжения , который преобразует постоянное напряжение постоянного тока в переменное напряжение переменного тока
Использование частотно-регулируемого привода на однофазном двигателе vs.Трехфазный двигатель
Специалисты отрасли могут использовать частотно-регулируемые приводы с однофазными или трехфазными двигателями. Однако, в зависимости от характеристик моторизованного приложения, может быть лучше использовать один тип двигателя, а не другой. Например:
- Однофазные двигатели подходят для приложений, требующих более низких уровней мощности
- Трехфазные двигатели подходят для приложений, требующих более низких оборотов в минуту и более высокой энергоэффективности
Хотя большинство доступных частотно-регулируемых приводов используются с тремя -фазные двигатели, существуют частотно-регулируемые приводы, специально предназначенные для использования с однофазными двигателями.Это несоответствие в доступности происходит из-за разницы в конфигурации обмоток между двумя типами двигателей и вытекающей из этого разницы в цене — трехфазные двигатели обычно дешевле, чем однофазные.
Промышленные применения частотно-регулируемых приводов
частотно-регулируемые приводы находят применение в широком спектре промышленных приложений, регулирующих мощность подключенных двигателей.
Однофазные частотно-регулируемые приводы используются для приложений с низким энергопотреблением, которым обычно требуется менее одной лошадиной силы.Вот некоторые из вариантов использования однофазных частотно-регулируемых приводов:
- Контроллеры и нагнетатели воздушного потока
- Центробежные насосы
- Электробритвы
- Непромышленные вентиляторы
- Пылесосы
- Игрушки
Трехфазные частотно-регулируемые приводы шт.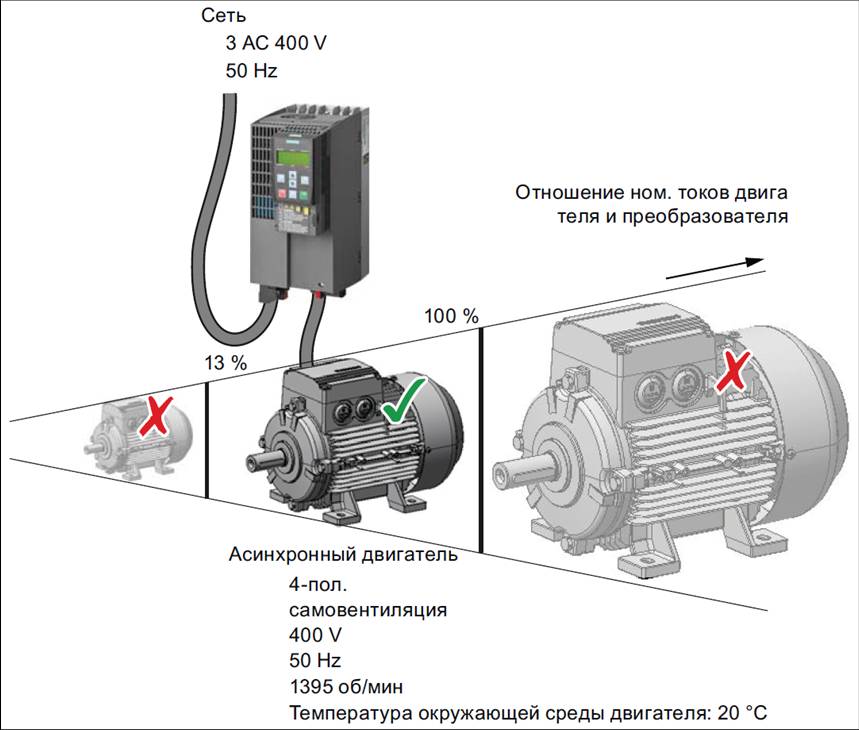 используется для широкого спектра мощного промышленного оборудования и систем, включая:
используется для широкого спектра мощного промышленного оборудования и систем, включая:
- Воздушные компрессоры
- Центробежные насосы
- Морозильные камеры и холодильники
- Системы отопления, вентиляции и кондиционирования воздуха (HVAC)
- Тяжелое оборудование, такое как дрель прессы, дробилки, конвейеры, шлифовальные машины, токарные станки, миксеры, шлифовальные машины, пилы и т. д.
- Подъемное оборудование, такое как краны и подъемники
Как правильно выбрать частотно-регулируемый привод для вашего двигателя
Некоторые из ключевых соображений , которые следует учитывать при выборе частотно-регулируемого привода для двигателя:
- Количество необходимых двигателей управление
- Входная мощность по напряжению и количество фаз (однофазных или трехфазных) каждого двигателя
- Номинальная мощность и ток каждого двигателя при полной нагрузке
- Рабочие требования, такие как требуемая скорость или крутящий момент двигателя
- Эксплуатация окружающая среда
- Требования к интерфейсу для ввода данных оператором в систему моторного привода
Частотно-регулируемые приводы (VFD) от Gainesville
Gainesville Industrial Electric (GIE) — крупнейший независимый дистрибьютор двигателей в Джорджии.Для поддержки наших моторных продуктов мы также предлагаем линейку частотно-регулируемых приводов от TECO Westinghouse Motor Company, опытного разработчика и производителя двигателей и частотно-регулируемых приводов.
Наши предложения по частотно-регулируемым приводам включают:
TECO Westinghouse Низковольтные приводы переменного тока
Низковольтные приводы переменного тока, предлагаемые TECO-Westinghouse, с выходной мощностью от л.с. до 1000 л.с. и включают:
- L510 микро-приводы переменного тока : от 1/4 до 3 л.с.
- Компактные приводы N3 : от 1/2 до 75 л.
с.
- E510 Приводы переменного тока NEMA 4/12 : от 1 до 25 л.с.
- Приводы вентилятора и насоса F510 переменного тока : от 5 до 250 л.с.
- A510 Приводы переменного тока для тяжелых условий эксплуатации : от 1 до 250 л.с.
- Приводы переменного тока серии EQ7 : от 1 до 1000 л.с.
Приводы переменного тока среднего напряжения TECO Westinghouse
VersaBridge® medium Приводы переменного тока подходят для промышленных приложений, требующих выходной мощности от 1500 до 40 000 л.с.Они находят применение в различных отраслях промышленности в тяжелых условиях, например в горнодобывающей, нефтегазовой, коммунальной и электроэнергетической.
Другие бренды, которые мы продаем
Для получения дополнительной информации о частотно-регулируемых приводах или помощи в выборе одного для вашего однофазного или трехфазного двигателя, свяжитесь с нами или запросите ценовое предложение.
Сопряжение новых частотно-регулируемых приводов с существующими двигателями
Двигатели, подключенные к частотно-регулируемым приводам, получают питание с изменяемой основной частотой, несущей частотой и очень быстрым нарастанием напряжения.Эти факторы могут иметь негативные последствия, особенно при использовании существующих двигателей.
Существует ряд потенциальных проблем, которые могут стать реальными при использовании частотно-регулируемого привода (ЧРП) для питания существующего асинхронного двигателя. Таким образом, вам следует провести тщательное исследование, чтобы определить, могут ли эти проблемы быть достаточно серьезными, чтобы вызвать пересмотр такой установки. С частотно-регулируемым приводом существующий двигатель, у которого обычно оставалось несколько лет эксплуатации, может внезапно выйти из строя.
Существующие двигатели рассчитаны только на работу с частотой 60 Гц, только 50 Гц или 60/50 Гц.h-r.png) Таким образом, вы должны задаться вопросом, может ли новый VFD соответствовать вашему существующему двигателю, и при этом он будет работать достаточно хорошо. Другими словами, сможет ли двигатель справиться с дополнительными факторами, которые могут вызвать большую вибрацию, повышение температуры и т. Д., А также возможное усиление слышимого шума?
Таким образом, вы должны задаться вопросом, может ли новый VFD соответствовать вашему существующему двигателю, и при этом он будет работать достаточно хорошо. Другими словами, сможет ли двигатель справиться с дополнительными факторами, которые могут вызвать большую вибрацию, повышение температуры и т. Д., А также возможное усиление слышимого шума?
Вы должны знать о возможных побочных эффектах, вызванных высокой частотой импульсов при подключении частотно-регулируемого привода к существующему двигателю.Эти негативные эффекты включают дополнительный нагрев, слышимый шум и вибрацию. Кроме того, схема широтно-импульсной модуляции (ШИМ) (см. Врезку «Основы приводов с регулируемой скоростью» на стр. 38), которая вызывает высокую скорость нарастания напряжения несущей частоты, может вызвать пробой изоляции конечных витков обмоток двигателя, так как а также изоляция питающего кабеля.
Несущая частота, побочный продукт получения тока на переменной основной частоте, является причиной наличия дополнительных ватт в двигателе; эта мощность, по сути, является потраченной впустую энергией, которая нагревает двигатель.Величина таких потерь варьируется в зависимости от конструкции статора и ротора двигателя и частоты несущей волны.
На частотах, отличных от основной, двигатель работает с очень большим проскальзыванием и, следовательно, работает несколько неэффективно. (Скольжение — это разница между скоростью вращения магнитного поля статора [синхронной скоростью асинхронного двигателя] и скоростью ротора.) Кроме того, ротор разрезает многочисленные линии магнитного потока; это явление производит дополнительные ватты и дополнительное тепло.(Обратите внимание, что высокочастотные колебания тока имеют низкую величину, а дополнительное тепло на 5-10% выше, чем от чистой синусоидальной волны).
Синхронная скорость четырехполюсного двигателя, работающего от сети 60 Гц, составляет 1800 об / мин. В этом же двигателе, если учесть «обертоны» или пульсации основной частоты тока, вызванные несущей частотой напряжения 4 кГц, через него будет протекать ток, основанный на этой высокой частоте. Таким образом, ротор четырехполюсного двигателя с частотой 60 Гц (с номинальной скоростью при полной нагрузке 1750 об / мин), питаемый от частотно-регулируемого привода, настроенного на выходную частоту 10 Гц, будет вращаться с 1/6 номинальной скорости.Если требуемый крутящий момент нагрузки постоянен при скоростях от низкой до полной, частота вращения скольжения остается постоянной. (Для получения дополнительной информации о скольжении см. «Термины, которые следует знать» на странице 38 и «Некоторые основы двигателя» на странице 46.) Для указанного выше двигателя, который работает при 10 Гц, вал будет вращаться со скоростью 250 об / мин. .
В этом же двигателе, если учесть «обертоны» или пульсации основной частоты тока, вызванные несущей частотой напряжения 4 кГц, через него будет протекать ток, основанный на этой высокой частоте. Таким образом, ротор четырехполюсного двигателя с частотой 60 Гц (с номинальной скоростью при полной нагрузке 1750 об / мин), питаемый от частотно-регулируемого привода, настроенного на выходную частоту 10 Гц, будет вращаться с 1/6 номинальной скорости.Если требуемый крутящий момент нагрузки постоянен при скоростях от низкой до полной, частота вращения скольжения остается постоянной. (Для получения дополнительной информации о скольжении см. «Термины, которые следует знать» на странице 38 и «Некоторые основы двигателя» на странице 46.) Для указанного выше двигателя, который работает при 10 Гц, вал будет вращаться со скоростью 250 об / мин. .
Ротор, вращаясь со скоростью 250 об / мин и пересекая линии потока (магнитного поля) на основе основной частоты 10 Гц и синхронной скорости 300 об / мин (1/6 от 1800 об / мин), также пересекает линии магнитного потока из-за несущая частота напряжения 4 кГц.Синхронная скорость при 4 кГц составляет 120 000 об / мин ([120 x 4000] [деленное на] 4).
Исходя из синхронной скорости 120000 об / мин и скорости вала 250 об / мин, вы можете видеть, что магнитные линии потока, отсекаемые из-за несущей частоты (4 кГц), существенны по сравнению с синхронной скоростью 300 об / мин, вызванной 10 -Гц частота. Этот дополнительный ток, который передается на стержни ротора путем отсечения дополнительного магнитного потока, вызванного несущей частотой, производит очень небольшую полезную мощность.Большая часть этого тока рассеивается в виде тепла, что увеличивает температуру двигателя. Это дополнительное тепло представляет собой еще около 5-10% теплового накопления в двигателе и может вызвать дополнительную тепловую нагрузку на стержни ротора и обмотки статора двигателя, если он работает с полной нагрузкой. Эта высокочастотная мощность является неэффективным источником крутящего момента.
Из-за этих и других упомянутых условий вы можете захотеть снизить мощность существующего двигателя, когда он подключен к VFD. Количество энергии несущей частоты, рассеиваемой двигателем, зависит от амплитуды и частоты напряжения, а также реактивного сопротивления и сопротивления двигателя на результирующей частоте.Амплитуда тока определяется отношением напряжения к импедансу, а потерянные ватты — это произведение тока в квадрате на сопротивление.
Другие нежелательные побочные эффекты
Вы также должны знать о других потенциальных побочных эффектах, вызванных высокой частотой. К ним относятся нежелательный слышимый шум, вредная вибрация и проблемы с подшипниками.
Проблемы с вибрацией и шумом. Чтобы избежать проблем с шумом и вибрацией, рекомендуется, чтобы в используемом двигателе не было компонентов, которые могут резонировать на частотах, создаваемых двигателем (и его нагрузкой).Это возможно в системах, где частота питания известна, например, 60 Гц. Однако современные частотно-регулируемые приводы не имеют стандартной несущей частоты, а основная частота может находиться в диапазоне от менее 10% от 60 Гц до 100% от 60 Гц и выше. В зависимости от того, какая марка и номер модели частотно-регулируемого привода сопрягается с существующим двигателем, а также от других факторов, таких как характеристики электрической системы на объекте, резонансы в определенных компонентах могут возникать, а могут и не возникать.
Вы также должны учитывать, что, когда двигатель, рассчитанный на 60 Гц, работает на другой электрической частоте, различные компоненты двигателя могут войти в механический резонанс, например вентилятор или вал.Каждый компонент имеет свою собственную механическую частоту, а электрическая частота, проходящая через катушки и стержни ротора, может вызывать механические колебания, которые отличаются от исходных проектных параметров. Когда электрическая частота соответствует собственной частоте механического компонента, могут возникнуть серьезные проблемы. Это может включать распад компонента.
Это может включать распад компонента.
Проблемы с подшипником. Еще одна возможная проблема, которая до сих пор не полностью изучена, — это медленное разрушение роликовых / шариковых (антифрикционных) подшипников, поддерживающих вал.Похоже, это вызвано током в подшипниках и статическим разрядом. Происходит то, что на поверхности ролика / шарика возникает точечная коррозия, которая при накоплении вызывает шум в подшипнике. Если не принять меры, начнет развиваться вибрация.
Проблемы с воздушным потоком. Дополнительный фактор, который следует учитывать при работе стандартного двигателя 60 Гц на очень низкой скорости, заключается в том, что вентилятор, закрепленный и прикрепленный к ротору, может не создавать достаточного воздушного потока для эффективного охлаждения двигателя. Это верно, потому что воздушный поток пропорционален скорости вала.Таким образом, при половинной скорости вала воздушный поток вдвое меньше нормального. Для компенсации небольшого расхода воздуха при низких скоростях двигателя, если установка возможна, прикрепление блока нагнетателя воздуха постоянной скорости к задней части двигателя обычно обеспечивает надлежащее охлаждение.
Пробой изоляции проводникаКак уже упоминалось, схема ШИМ, вызывающая высокую скорость нарастания напряжения на несущей частоте, может вызвать пробой изоляции концевых витков обмоток двигателя, а также возможное нарушение изоляции фидерного кабеля.Это связано с очень высокой скоростью нарастания напряжения (скоростью изменения напряжения во времени) в сочетании с очень быстро повторяющимся импульсом напряжения, вызванным частотно-регулируемым приводом. [ИЛЛЮСТРАЦИЯ К РИСУНКУ 3 ОПРЕДЕЛЕНА]. Из-за этого явления произошли нарушения изоляции проводов в двигателях. Этот предмет не до конца изучен и в настоящее время исследуется. Известные факты по этому поводу резюмируются следующим образом.
- Переключатели в секции инвертора частотно-регулируемых приводов, используемых сегодня, приводят к тому, что мгновенное межвитковое напряжение внутри обмоток двигателя значительно выше, чем то, что производит эквивалентный нормальный источник синусоидальной волны.

- Каждый цикл основного напряжения состоит из множества импульсов напряжения.
- Большое расстояние между двигателем и его частотно-регулируемым приводом приводит к тому, что межвитковое напряжение становится еще выше.
Есть разные подходы к объяснению увеличения напряжения на клеммах двигателя. Некоторые объясняют это с помощью цепей резонансной емкости / индуктивности (LC); другие объясняют это с точки зрения теории стоячей волны. Оба подхода дают одинаковый результат.Когда расстояние между двигателем и его частотно-регулируемым приводом превышает критическое расстояние (которое может составлять всего 30 футов), возникает выброс напряжения, который может в два раза превышать амплитуду импульса напряжения, первоначально подаваемого на выходные клеммы частотно-регулируемого привода.
Это более высокое напряжение поступает на двигатель с такой высокой скоростью изменения для каждого из импульсов ШИМ, от нуля вольт до его пикового значения, что оно неравномерно распределяется по обмотке, вызывая высокие межвитковые напряжения в ближайших к нему витках. к силовым проводам.В результате на изоляцию проводника оказывается очень большая нагрузка, что может вызвать преждевременный пробой изоляции.
Доступны двигатели со специальным инверторным режимом, которые разработаны для соответствия или превышения амплитуд напряжения и времени нарастания, определенных в стандарте NEMA MG1, Двигатели и генераторы, Раздел .31.40.4.2, Пики напряжения. При подключении существующих двигателей к частотно-регулируемым приводам с помощью кабеля большой длины следует рассмотреть возможность использования фильтра, чтобы уменьшить влияние длинного кабеля.
Скин-эффект способствует убыткам
В дополнение к проблемам, описанным выше, есть еще один компонент потерь, о котором вы должны знать: скин-эффект.Скин-эффект заставляет ток в системе переменного тока вытесняться на внешнюю поверхность проводника. Это явление приводит к тому, что сопротивление напрямую связано с квадратным корнем из частоты тока. Другими словами, чем больше частота, тем больше сопротивление из-за скин-эффекта. Несущие частоты обычно находятся в диапазоне от 800 Гц до 15 кГц, и токи на этих высоких частотах вызовут потери [I.sup.2] R. Хотя высокочастотные токи относительно номинальны, потери связаны с квадратичной мощностью тока.А несущая частота, даже в виде квадратного корня, может быть в некоторой степени эффективной из-за своего базового высокого значения. Геометрия стержней ротора также определяет степень влияния скин-эффекта на потери в роторе.
Другими словами, чем больше частота, тем больше сопротивление из-за скин-эффекта. Несущие частоты обычно находятся в диапазоне от 800 Гц до 15 кГц, и токи на этих высоких частотах вызовут потери [I.sup.2] R. Хотя высокочастотные токи относительно номинальны, потери связаны с квадратичной мощностью тока.А несущая частота, даже в виде квадратного корня, может быть в некоторой степени эффективной из-за своего базового высокого значения. Геометрия стержней ротора также определяет степень влияния скин-эффекта на потери в роторе.
Применение двигателя очень важно
Вы должны помнить, что двигатель — это машина с постоянным крутящим моментом. Другими словами, при номинальной скорости и номинальном крутящем моменте он будет производить определенную мощность в лошадиных силах. Когда скорость снижается за счет уменьшения частоты и напряжения, двигатель, потребляя больше тока, будет пытаться поддерживать постоянную мощность, если этого требует нагрузка.Это можно сделать в ограниченной степени. Чем больше тока протекает, тем больше тепла выделяется, и двигатель быстро нагревается.
В ситуациях, когда во всем используемом диапазоне скоростей требуется постоянная мощность, очень важно, чтобы размер двигателя соответствовал требуемой мощности при минимальной ожидаемой скорости вала. Например, если требуемый диапазон скоростей составляет от 50% до 100% номинальной скорости, а требуемая мощность нагрузки составляет 100 л.с., то двигатель все равно должен иметь возможность производить 100 л.с. при 50% скорости.Это также означает, что при 100% скорости выходная мощность двигателя, требуемая его нагрузкой, также будет составлять 100 л.с. однако требуемый крутящий момент нагрузки будет снижен на 50%. На полной скорости двигатель будет способен производить 200 л.с., что означает, что двигатель будет больше обычного.
При использовании частотно-регулируемого привода, когда основная частота снижается для достижения более низкой скорости, напряжение также уменьшается прямо пропорционально снижению скорости. Как упоминалось ранее, двигатель на 460 В при половинной скорости ротора будет иметь 230 В.Таким образом, если мощность двигателя составляет 100 л.с. на полной скорости, его мощность будет только 50 л.с. на половинной скорости.
Как упоминалось ранее, двигатель на 460 В при половинной скорости ротора будет иметь 230 В.Таким образом, если мощность двигателя составляет 100 л.с. на полной скорости, его мощность будет только 50 л.с. на половинной скорости.
Определенным нагрузкам, например токарным и шлифовальным станкам, требуется постоянная мощность в лошадиных силах во всем диапазоне рабочих скоростей. Предположим, ЧРП обслуживает двигатель токарного станка мощностью 20 л.с., который работает со снижением скорости на 25% (3/4 номинальной скорости). Вращающийся патрон токарного станка, который удерживает некоторый материал, обрабатываемый режущим инструментом, потребует постоянной мощности во всем используемом диапазоне скоростей. Если скорость снижена на 25%, напряжение снизится на 25%.Чтобы двигатель мог поддерживать постоянную мощность в лошадиных силах, он будет потреблять на 33% больше тока (4/3 нормальной силы тока). Поскольку ток производит тепло (в первую очередь потери [I.sup.2] R), двигатель должен иметь достаточную тепловую мощность, чтобы выдерживать дополнительный ток.
Некоторые двигатели могут выдерживать определенную избыточную тепловую нагрузку в зависимости от эксплуатационного фактора двигателя (SF). Обычно SF составляет от 1,0 до 1,15; за пределами этой точки произойдет повреждение двигателя. Поскольку напряжение снижается с использованием частотно-регулируемого привода, номинальная мощность двигателя в лошадиных силах должна быть увеличена, чтобы соответствовать требованиям к нагрузке на самой низкой используемой скорости, если требуется постоянная мощность в лошадиных силах.Конечно, это означает, что двигатель перестроен при использовании на более высоких скоростях и будет иметь более высокие потери и более низкий коэффициент мощности (PF) на более высоких скоростях при работе с меньшей, чем полная нагрузка. Однако более низкий коэффициент мощности компенсируется ЧРП. Это условие, которое необходимо принять. В противном случае вы напрашиваетесь на неприятности.
При работе с двигателями вам будет полезно помнить следующие отношения:
1 л.с. = 0,746 кВт = [3 фунт-фут x 1750 об / мин] [деленное на] 5250
Любой из этих номеров можно изменить.Однако при этом должно соблюдаться равенство обеих сторон уравнения. Крутящий момент составляет фут-фунт. Если мощность остается постоянной, а скорость (об / мин) снижается, очевидно, что крутящий момент должен быть увеличен. Таким образом, в приведенном выше применении двигателя (где скорость снижена на 25%) выходной крутящий момент двигателя должен быть увеличен на 33%. И если мощность в кВт остается постоянной, а напряжение снижается (что произойдет при использовании частотно-регулируемого привода для уменьшения скорости), ток необходимо увеличить. Это может привести к перегреву. Неправильное использование двигателей — одна из основных причин их выхода из строя.
Если кто-то рекомендует приобрести частотно-регулируемый привод для вашего существующего двигателя с целью внесения изменений, которые привели бы к установке любого значения выходного напряжения (с ограничением до входящего напряжения частотно-регулируемого привода) для любой конкретной основной частоты, будьте осторожны.
Такая корректировка может быть произведена; например, вы можете настроить частотно-регулируемый привод на 460 В при 30 Гц. Если 460 В — это линейное напряжение (то есть максимальное напряжение), тогда, когда основная частота превышает заданное значение, напряжение, поступающее на двигатель, остается постоянным.
Давайте еще раз посмотрим на один из приведенных выше примеров. Скажем, 100 л.с. требуется при половинной скорости, а частотно-регулируемый привод настроен на выдачу 460 В при 30 Гц. Если вы используете существующий двигатель мощностью 100 л.с., что произойдет? Что ж, двигатель будет пытаться выдать 100 л.с. на половинной скорости и продолжит попытки, если основная частота будет увеличена, а напряжение останется постоянным на уровне 460 В. (Обратите внимание, что когда основная частота становится ниже установленного значения [скажем, 15 Гц], напряжение будет пропорционально уменьшено, в данном случае до 230 В. ) При 30 Гц и 460 В железо в статоре этого существующего двигателя магнитно насыщено, что приводит к протеканию большего тока и чрезмерному нагреву двигателя. Это состояние может разрушить изоляцию проводов, а также отрицательно повлиять на другие компоненты двигателя. В статорах двигателей обычно достаточно железа, чтобы выдерживать определенное отношение напряжения к частоте (В / Гц). Но когда соотношение сильно увеличивается, требуется больше железа; иначе будет перегрев.
) При 30 Гц и 460 В железо в статоре этого существующего двигателя магнитно насыщено, что приводит к протеканию большего тока и чрезмерному нагреву двигателя. Это состояние может разрушить изоляцию проводов, а также отрицательно повлиять на другие компоненты двигателя. В статорах двигателей обычно достаточно железа, чтобы выдерживать определенное отношение напряжения к частоте (В / Гц). Но когда соотношение сильно увеличивается, требуется больше железа; иначе будет перегрев.
Тем не менее, использование 30 Гц при 460 В — это эффективный способ получения регулируемой скорости при постоянной мощности, при условии, что железо в статоре двигателя рассчитано на более высокое соотношение В / Гц.Это означает, что в статор двигателя необходимо поместить больше железа. Сегодня существуют определенные двигатели, у которых в статоре есть дополнительное железо для работы при высоких соотношениях В / Гц. За них придется заплатить больше. Но для определенных типов приложений, таких как вышеупомянутые, такие двигатели могут быть экономически эффективными по сравнению с использованием существующего двигателя с удвоенной мощностью. Это связано с тем, что двигатель премиум-класса может работать при 30 Гц, 460 В и нормальном токе, в то время как существующий двигатель большой мощности, работающий при 30 Гц, 230 В, должен будет использовать удвоенный ток и будет испытывать потери, связанные с высоким напряжением. текущая операция.
Резюме
Применяя двигатели к нагрузкам, требующим постоянной мощности в широком диапазоне скоростей, вам часто будет полезно работать с человеком, разбирающимся в двигателях. Когда. при использовании существующего двигателя для такого использования часто достигается компромисс между мощностью двигателя и фактической выходной мощностью, другими словами, снижение номинальных характеристик двигателя. В таких ситуациях, вероятно, будет лучше приобрести новый двигатель, отвечающий вашим требованиям.
Когда вы используете двигатель для приложения, в котором требования к крутящему моменту остаются постоянными или уменьшаются во всем применяемом диапазоне скоростей, частотно-регулируемый привод будет хорошим средством для достижения контроля скорости, при условии, что двигатель способен обрабатывать искаженную электрическую мощность, подаваемую на него. по ПФО.Применения, в которых требования к крутящему моменту остаются постоянными или уменьшенными во всем диапазоне скоростей двигателя, включают вентиляторы, насосы и конвейерные ленты.
по ПФО.Применения, в которых требования к крутящему моменту остаются постоянными или уменьшенными во всем диапазоне скоростей двигателя, включают вентиляторы, насосы и конвейерные ленты.
Существуют определенные нагрузки, такие как центробежные насосы и вентиляторы, где при уменьшении скорости крутящий момент обычно уменьшается пропорционально квадрату скорости, а мощность в лошадиных силах уменьшается пропорционально кубу скорости. Таким образом, если мощность в лошадиных силах устанавливается на нижнем пределе требуемой скорости (скажем, 50% номинальной скорости при 10 л.с.), потребность в лошадиных силах на полной скорости будет в восемь раз больше, или 80 л.с.Как вы можете видеть в такой ситуации, решающий фактор для требований к мощности должен быть основан на полной номинальной нагрузке.
УСЛОВИЯ ЗНАТЬ
Инвертор. Машина, устройство или система, которые меняют мощность постоянного тока на мощность переменного тока. Что касается частотно-регулируемых приводов, работа инвертора осуществляется такими устройствами, как биполярные транзисторы с изолированным затвором (IGBT) и тиристоры с выключенным затвором (GTO).
Выпрямитель. Машина, устройство или система, которые меняют мощность переменного тока на мощность постоянного тока.Выпрямление в частотно-регулируемых преобразователях типа ШИМ выполняется диодами в так называемых «мостовых схемах».
Синхронная скорость. В асинхронных двигателях скорость вращения магнитного поля статора называется синхронной скоростью, которая равна (в об / мин): [120] x [f (частота сети в Гц)] [деленная на] P ( количество полюсов).
Соскальзывать. Этот термин отражает разницу между синхронной скоростью асинхронного двигателя и скоростью его ротора. Коэффициент скольжения в процентах равен [(синхронная скорость — скорость ротора) [деленная на] синхронную скорость] x 100.
СВЯЗАННАЯ СТАТЬЯ: ОСНОВЫ РЕГУЛИРУЕМОЙ СКОРОСТИ ПРИВОДА
Существуют разные типы частотно-регулируемых приводов, но все они используют принцип изменения основной частоты (60 Гц или 50 Гц) для изменения скорости. Основными компонентами частотно-регулируемого привода являются выпрямительное / инверторное оборудование (последнее включает в себя электрическую коммутационную аппаратуру) и электронное управление. ЧРП изменяет (выпрямляет) поступающее напряжение 60 Гц на постоянный ток, а затем меняет (инвертирует) постоянный ток обратно на переменный, но с регулируемой основной частотой.
Основными компонентами частотно-регулируемого привода являются выпрямительное / инверторное оборудование (последнее включает в себя электрическую коммутационную аппаратуру) и электронное управление. ЧРП изменяет (выпрямляет) поступающее напряжение 60 Гц на постоянный ток, а затем меняет (инвертирует) постоянный ток обратно на переменный, но с регулируемой основной частотой.
Для двигателя с постоянным числом полюсов существует прямая зависимость между основной частотой и частотой вращения вала двигателя. Таким образом, двигатель с номинальной частотой 60 Гц, работающий на половине номинальной скорости, будет питаться от частотно-регулируемого привода, производящего мощность 30 Гц.
Самый популярный тип частотно-регулируемого привода, производимый сегодня, производит переменный ток посредством широтно-импульсной модуляции (ШИМ), которая разбивает синусоидальную волну на сегменты постоянного тока постоянной амплитуды каждые полупериод. Полный цикл состоит из половины положительного и половины отрицательного сегментов напряжения.Эта обработка модуляции электроэнергии создает импульсы постоянного напряжения очень высокой частоты (в диапазоне от 800 Гц до 15 кГц) для каждого полупериода. Эти импульсы имеют прямоугольную форму при просмотре на осциллографе и шире (большая продолжительность) в центре полупериода и уже в конце полупериода. [ИЛЛЮСТРАЦИЯ К РИСУНКУ 1 ОПРЕДЕЛЕНА] на странице 41.)
Высокая частота импульсов напряжения из десяти называется несущей частотой. Эти многочисленные «выстрелы» напряжения постоянного тока каждые полупериод имеют время нарастания напряжения на шине постоянного тока от нуля до полного, составляющее десятые доли микросекунд.Эта скорость нарастания импульсов напряжения (изменение напряжения от нуля до пикового напряжения) намного выше, чем скорость нарастания напряжения для нормальной синусоидальной волны. Из-за высокой скорости нарастания напряжения возникают скачки напряжения.
Поскольку ЧРП типа ШИМ вырабатывает высокочастотное пульсирующее напряжение, результирующий ток, который обратно зависит от импеданса, на самом деле имеет форму синусоидальной волны, но с многочисленными небольшими отклонениями, такими как частота тона, производимого музыкальный инструмент с обертонами, связанными с инструментом. Обычно полное гармоническое искажение (THD) на этих высоких частотах (от 800 до 15 кГц) составляет от 5% до 10%.
Обычно полное гармоническое искажение (THD) на этих высоких частотах (от 800 до 15 кГц) составляет от 5% до 10%.
Результатом процесса ШИМ является ток, имеющий синусоидальную волну, которая может варьироваться от 1 до 60 Гц (а иногда большое число может превышать 60 Гц для получения скоростей ротора, превышающих номинальную). Но форма волны тока на самом деле представляет собой сумму основной частоты плюс все сверхвысокие частоты, генерируемые во время обработки модуляции, которая используется для создания пульсирующего напряжения.Из-за индуктивности обмотки двигателя форма волны тока выглядит синусоидальной с наложенным высокочастотным «шумом». Это приводит к тому, что текущая синусоида имеет множество мелких ряби или «обертонов», как показано на рис. 2 на стр. 41.
Выходной сигнал частотно-регулируемого привода состоит из двух компонентов: регулируемой основной частоты и несущей частоты. Таким образом, двигатель, подключенный к ЧРП, получает питание с этими частотами.
Воздействие высокой несущей частоты на двигатель может быть вредным.Чтобы уменьшить это влияние, ряд частотно-регулируемых приводов теперь используют асинхронное переключение, которое заставляет несущую частоту постоянно изменять частоту на очень высоких скоростях. При этом частотно-регулируемый привод ограничивает по крайней мере одно негативное воздействие (шум), вызванное несущей частотой.
Следует отметить, что по мере того, как основная частота (которая определяет скорость двигателя) уменьшается для снижения номинальной скорости вращения вала, напряжение также уменьшается, и в том же соотношении. Это означает, что для частотно-регулируемого привода, обслуживающего двигатель 460 В, работающий при 50% номинальной скорости, частотно-регулируемый привод подает на двигатель мощность 30 Гц и делает это при 230 В.Таким образом, двигатель развивает тот же крутящий момент, но только на половинной скорости и на половине его номинальной мощности.
СВЯЗАННАЯ СТАТЬЯ: УСТАНОВКА ТИПОВОГО ДВИГАТЕЛЯ / ПРИВОДА
Понимание характеристик двигателя и характеристик нагрузки очень важно при использовании двигателя для определенной нагрузки. И такое понимание становится более важным при использовании частотно-регулируемых приводов.
И такое понимание становится более важным при использовании частотно-регулируемых приводов.
Асинхронные двигатели, которые обычно рассчитаны на определенную скорость, являются наиболее популярным приводным механизмом, используемым сегодня.При заданной установившейся нагрузке эти двигатели будут поддерживать постоянную скорость вращения вала. Другими словами, за исключением небольших изменений номинальной скорости из-за колебаний нагрузки, скорость вала двигателя не изменяется. Вместо этого он определяется частотой источника питания, подаваемого на двигатель, и количеством полюсов двигателя.
Сегодня, когда для системы привода требуется регулировка скорости, обычным подходом является покупка ЧРП и использование двигателя, который был разработан для обработки дополнительных параметров, помимо тех, которые требуются для работы с нормальной синусоидальной волной 60 или 50 Гц.Таким образом, частотно-регулируемые приводы и двигатели часто заказываются комплектом из одного источника. Таким образом вы не только получите двигатель и частотно-регулируемый привод согласованной конструкции, но и получите преимущество, связанное с тем, что в случае возникновения проблем будет иметь дело всего один производитель. (См. Фото на странице 38.)
Однако соображения стоимости могут способствовать согласованию существующего двигателя с новым частотно-регулируемым приводом. В этой ситуации требуется тщательный анализ этого соответствия.
СВЯЗАННАЯ СТАТЬЯ: НЕКОТОРЫЕ ОСНОВЫ МОТОРА
Синхронная скорость асинхронного двигателя представлена следующим уравнением:
[Н.sub.s] = (120xf) [разделить на] P
где [N.sub.s] = синхронная скорость в об / мин
f = частота сети в Гц
P = количество полюсов
Например, четырехполюсный асинхронный двигатель с частотой 60 Гц имеет синхронную скорость 1800 об / мин ([120 x 60] [деленное на] 4).
Скорость ротора двигателя всегда меньше синхронной скорости, потому что первый потребляет электрическую / магнитную энергию, вращаясь медленнее, чем магнитное поле статора. (В случае с генератором все наоборот: ротор, вращающийся со скоростью, превышающей синхронную, подает электроэнергию на клеммы.) Эта разница в скорости называется скольжением. Коэффициент скольжения представлен следующим уравнением:
(В случае с генератором все наоборот: ротор, вращающийся со скоростью, превышающей синхронную, подает электроэнергию на клеммы.) Эта разница в скорости называется скольжением. Коэффициент скольжения представлен следующим уравнением:
% Коэффициент скольжения = [([N.sub.s] — [N.sub.r]) [делится на] [N.sub.s]] x 100
где [N.sub.r] = частота вращения ротора в об / мин
Таким образом, ненагруженный высокоэффективный четырехполюсный двигатель, работающий при частоте вращения вала 1790 об / мин, будет иметь коэффициент скольжения 56%.Это выводится следующим образом: [(1800 — 1790) [деленное на] 1800] x 100. Тот же самый двигатель при полной нагрузке может иметь скорость вала 1750 об / мин. При этом условии коэффициент скольжения будет 2,78%. Выведение: [(1800 — 1750) [деленное на] 1800] x 100. Скорость вала при полной нагрузке для асинхронного двигателя с синхронной скоростью 1800 об / мин обычно варьируется от примерно 1780 до 1730 об. / Мин. Эта скорость зависит от КПД двигателя / конструктивных характеристик.
Более низкая скорость (величина скольжения) позволяет ротору пересекать магнитные линии потока, установленные статором, создавая таким образом электроэнергию для своих магнитных нужд.По мере увеличения жабы двигателя скорость ротора уменьшается, в результате чего линии магнитного потока срезаются с большей скоростью. Это вызывает большее напряжение в стержнях ротора и больший ток, тем самым вырабатывая больше электроэнергии, чтобы противодействовать увеличению требований к крутящему моменту. Когда линии потока пересекаются с большей скоростью, течет больше тока и увеличивается нагрев из-за потерь [I.sup.2] R.
Лестер Б. Манц — руководитель отдела разработки регулируемых скоростей GE Motors, Форт-Уэйн, Индиана.Роберт Б. Морган — старший редактор журнала EC&M.
Основы частотно-регулируемых приводов
Когда Тесла впервые представил трехфазный асинхронный двигатель переменного тока (AC) в 1888 году, он знал, что его изобретение было более эффективным и надежным, чем двигатель постоянного тока (DC) Эдисона.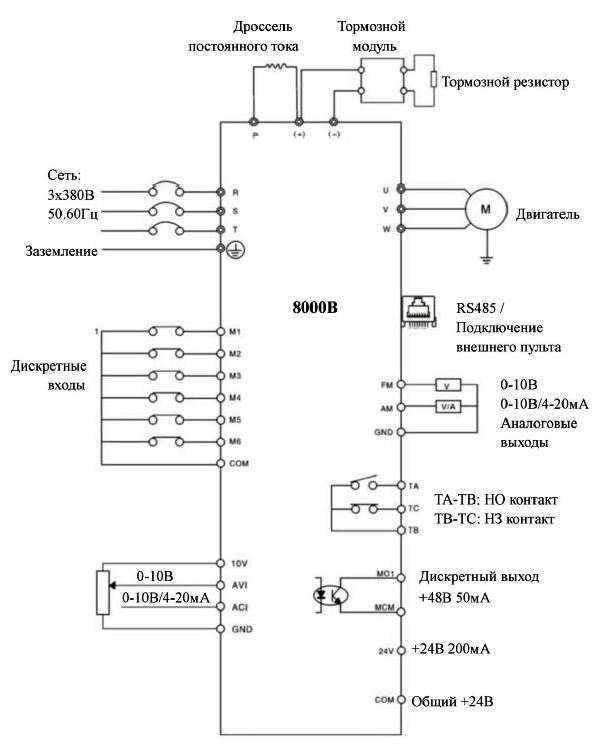 Однако для управления скоростью двигателя переменного тока требуется либо изменение магнитного потока, либо изменение числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для управления скоростью оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
Однако для управления скоростью двигателя переменного тока требуется либо изменение магнитного потока, либо изменение числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для управления скоростью оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
В результате двигатели постоянного тока были необходимы там, где требовались точный контроль скорости и значительная выходная мощность. В отличие от требований к управлению скоростью электродвигателя переменного тока, управление скоростью электродвигателя постоянного тока было достигнуто путем включения реостата в цепь возбуждения постоянного тока малой мощности, что было осуществимо с помощью имеющихся технологий. Эти простые средства управления двигателем меняли скорость и крутящий момент, и в течение ряда десятилетий были наиболее экономичным способом сделать это.
Рис. 1. Идеальная синусоида и форма сигнала ШИМ.
К 1980-м годам технология приводов двигателей переменного тока стала достаточно надежной и недорогой, чтобы конкурировать с традиционными системами управления двигателями постоянного тока. Эти частотно-регулируемые приводы (ЧРП) точно регулируют скорость стандартных асинхронных или синхронных двигателей переменного тока. При использовании частотно-регулируемых приводов управление скоростью с полным крутящим моментом достигается от 0 об / мин до максимальной номинальной скорости и, если требуется, выше номинальной скорости при пониженном крутящем моменте. ЧРП регулируют частоту своего выхода, преобразуя входящий переменный ток в постоянный, а затем используя широтно-импульсную модуляцию напряжения для воссоздания формы выходного переменного тока и напряжения.Однако этот процесс преобразования частоты приводит к потере от 2% до 3% тепла в частотно-регулируемом приводе — калорийной энергии, которая должна рассеиваться. Процесс также приводит к скачкам перенапряжения и гармоническим искажениям тока.
Частотно-регулируемые типы
Существует три распространенных типа частотно-регулируемых приводов. Инверсия источника тока (CSI) успешно используется в системах обработки сигналов и в промышленных энергетических приложениях. CSI VFD — единственный тип, который имеет возможность рекуперации энергии. Другими словами, они могут поглощать обратный поток мощности от двигателя к источнику питания.ЧРП CSI выдают очень чистую форму волны тока, но для их конструкции требуются большие и дорогие индукторы, что приводит к появлению зубцов (пульсирующее движение во время вращения) ниже 6 Гц.
Приводыс инверсией источника напряжения (VSI) имеют низкий коэффициент мощности, могут вызывать зубцовый сдвиг двигателя ниже 6 Гц и не являются регенеративными. Следовательно, диски CSI и VSI не получили широкого распространения.
ЧРП с широтно-импульсной модуляцией (ШИМ) чаще всего используются в промышленности из-за превосходного входного коэффициента мощности за счет фиксированного напряжения на шине постоянного тока, отсутствия зубчатого зацепления двигателя, более высокого КПД и более низкой стоимости.ЧРП с ШИМ использует серию импульсов напряжения разной длины для имитации синусоидальной волны ( рис. 1 на стр. 8). В идеале импульсы синхронизируются так, чтобы средний интеграл привода по времени давал идеальную синусоиду. Текущий метод получения этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выдает импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В качестве электрического компонента тока для генерации импульса напряжения используется биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать.В ближайшем будущем для выполнения этой задачи будут использоваться затворные транзисторы с усиленной инжекцией (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
Мемристоры — четвертый пассивный элемент схемы, связывающий электрический заряд и магнитный поток. Предполагается, что мемристоры существуют уже более 30 лет, но не были изготовлены до апреля 2008 года Hewlett Packard Labs. Hewlett Packard надеется использовать эти устройства в качестве пассивных транзисторов, уменьшая их тепловыделение по сравнению с другими типами памяти.Независимо от компонента, используемого для формирования синусоидальной волны, переключение вызывает проблемы.
Тепло, потери мощности и гармоники
Первая проблема, которую необходимо решить производителю частотно-регулируемого привода, — это нагрев. Хотя частотно-регулируемые приводы являются высокоэффективными устройствами, производители не могут создать идеальный набор компонентов. Потери тепла в приводе регулируются следующим уравнением:
H потеря = P t (1-η)
Где H loss — потеря мощности (Вт), P t — мощность, проходящая через привод (Вт), а η — эффективность привода.Обычно ЧРП имеют рейтинг эффективности от 95% до 98%. Это означает, что количество воздуха, которое должно пройти через привод, определяется уравнением:
м = H потери ÷ (C p ΔT) = P t (1-η) ÷ (C p ΔT)
Где m — массовый расход (кг / с), C p — удельная теплоемкость воздуха [кДж ÷ (кг × K)], а ΔT — разница температур между входящим и выходящим воздухом ( К). Это тепло может привести к значительным затратам на охлаждение, которые будут добавлены к конструкции, особенно если привод не может быть размещен в несекретном месте (в зоне, свободной от легковоспламеняющихся газов или частиц).Если привод должен быть размещен в засекреченном месте, то воздушный поток, идущий к приводу, необходимо будет продуть и создать давление.
Рис. 2. Реальная синусоида и форма сигнала ШИМ. Обратите внимание, как гармоники влияют на форму синусоиды.
Нагрев — это только одна из проблем частотно-регулируемых приводов. Другая серьезная проблема связана с системными гармониками. Изображение ШИМ и вызываемых ими гармоник показано на рис. Рис. 2 . Неровности синусоидальной волны называются гармониками.В идеальном мире силовых цепей этих гармоник не должно быть. Они ничего не делают, но создают проблемы. К счастью, есть несколько способов уменьшить гармоники.
Один из простейших методов борьбы с гармониками — разместить синусоидальный фильтр по обе стороны от частотно-регулируемого привода. Со стороны линии они обычно называются линейными реакторами и имеют значения реактивного сопротивления от 1,5% до 5,0% импеданса. Более высокий импеданс не только задерживает больше гармоник, но также ограничивает мощность, поступающую на частотно-регулируемый привод.
Еще одна тактика, которую можно использовать на линейной стороне частотно-регулируемого привода, — это разместить конденсаторы на общей шине. Поскольку импеданс конденсатора обратно пропорционален частоте сигнала, гармоники видят короткое замыкание через конденсатор и проходят через конденсатор на землю, игнорируя другие нагрузки на шине. ЧРП также могут использовать активный интерфейс для ограничения гармоник, которые видит сторона линии. Активный входной каскад имеет еще один переключатель IGBT с обратным напряжением в качестве основного IGBT, но он проходит через фильтр верхних частот, так что основной сигнал мощности идет на землю.Сумма двух гармонических сигналов в идеале должна быть равна нулю. Если активный внешний привод по какой-либо причине не подходит, можно приобрести пассивный внешний VFD. Пассивные входные частотно-регулируемые приводы используют несколько фазосдвигающих трансформаторов и диодные мосты для подавления гармоник.
Чем больше импульсов у пассивного внешнего частотно-регулируемого привода, тем меньше проблем с гармониками. Компромисс заключается в том, что линейные напряжения должны быть хорошо сбалансированы, а каждый дополнительный фазосдвигающий трансформатор увеличивает стоимость и снижает эффективность. В крайних случаях можно приобрести изолирующий трансформатор. Хотя это один из самых эффективных способов предотвращения распространения гармоник, он также является одним из самых дорогостоящих.
В крайних случаях можно приобрести изолирующий трансформатор. Хотя это один из самых эффективных способов предотвращения распространения гармоник, он также является одним из самых дорогостоящих.
Если гармоники недостаточно подавлены на линии VFD, могут возникнуть перекрестные помехи и перегрев. Перегрев может привести либо к уменьшению размеров шины, либо к увеличению затрат на охлаждение. Перекрестные помехи определяются как сигнал от одной цепи, создающей помехи другой цепи. Вообще говоря, это более серьезная проблема, чем перегрев.Примером может служить радиоприемник, который слегка расстроен. Несмотря на то, что через помехи можно слышать музыку, статические помехи раздражают. Перекрестные помехи — это неприятная вещь в телекоммуникационных цепях. В силовых цепях перекрестные помехи вызывают перегрев и срабатывание реле частоты.
Точно так же, как гармоники, оставленные неотмеченными на стороне линии, могут вызывать проблемы, они могут создавать проблемы и на стороне нагрузки. Это из-за природы волн. Например, небольшое усилие, приложенное к Slinky с обоих концов, вызовет синусоидальную волну большой амплитуды.Электромагнитные волны действуют таким же образом, а это означает, что небольшое реактивное сопротивление может вызвать большие всплески напряжения. Поскольку это реактивное сопротивление является индуктивным по своей природе, большинство выходных фильтров представляют собой конденсаторы, подключенные по схеме треугольника. В идеале это должно привести к нулю реактивной части импеданса. Если полное сопротивление подобрано правильно, этого не произойдет.
Предупреждение: конденсаторы, подключенные на стороне нагрузки частотно-регулируемого привода, могут создать большое количество проблем, вплоть до выхода из строя привода.Поэтому перед установкой синусоидального фильтра на стороне нагрузки частотно-регулируемого привода рекомендуется проконсультироваться с производителем привода. В редких случаях может использоваться активный фильтр. Хотя они, как правило, работают хорошо, они довольно дороги и обычно должны разрабатываться индивидуально.
Хотя они, как правило, работают хорошо, они довольно дороги и обычно должны разрабатываться индивидуально.
Преимущества ЧРП
Несмотря на то, что частотно-регулируемые приводы генерируют большое количество гармоник и тепла, они не были бы так широко распространены и популярны, как сегодня, если бы не имели значительной экономической выгоды.
Электрически частотно-регулируемые приводы работают с высоким коэффициентом мощности. Асинхронные двигатели любого класса обычно имеют низкий коэффициент мощности при нагрузке на половину и три четверти (от 0,75 до 0,85). Это фактически сокращает срок службы двигателя, так как ненужное увеличение тока приводит к перегреву изоляции обмотки. VFD обходят эту проблему, управляя нагрузкой с частотой ниже основной.
Самая очевидная причина для приобретения частотно-регулируемого привода — это регулировка скорости. Обычно это делается для технологических, эксплуатационных и экономических выгод.Одним из экономических преимуществ является сокращение объема технического обслуживания при использовании частотно-регулируемого привода, особенно отсутствие необходимости иметь дело с угольными щетками двигателя постоянного тока или механическими коробками передач (трансмиссиями) с регулировкой скорости. Наиболее очевидные экономические преимущества частотно-регулируемых приводов связаны с вентиляторами и насосами. Мощность, потребляемая насосом или вентилятором, прямо пропорциональна кубу скорости. Это означает, что если оператор может запустить вентилятор на 80% от полной скорости, он теоретически использует 51% от полной мощности нагрузки.
ЧРП также оптимизируют пусковые характеристики двигателя.Частотно-регулируемые приводы быстро разгоняют двигатели до полной скорости, потребляя от 100% до 150% тока полной нагрузки (FLA). Эта возможность запуска с нормальным значением FLA очень важна, если источник питания не может выдержать обычно шестикратное значение FLA при пуске через линию или даже ток устройства плавного пуска в размере 350% FLA. ЧРП делают это, управляя магнитным потоком асинхронного двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. При поддержании постоянного магнитного потока пусковой ток не превышает номинального значения FLA двигателя, и сохраняется полный крутящий момент.Это значительное улучшение по сравнению с плавным пуском, который имеет значительные проблемы с падением напряжения и не может запускаться при полной нагрузке.
ЧРП делают это, управляя магнитным потоком асинхронного двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. При поддержании постоянного магнитного потока пусковой ток не превышает номинального значения FLA двигателя, и сохраняется полный крутящий момент.Это значительное улучшение по сравнению с плавным пуском, который имеет значительные проблемы с падением напряжения и не может запускаться при полной нагрузке.
Другой потенциально полезный аспект VFD продемонстрирован на Fig. 3 , (щелкните здесь, чтобы увидеть Fig. 3 ), который показывает выходной сигнал VFD с постоянным крутящим моментом. Обратите внимание на две области: постоянный крутящий момент и постоянную мощность. Область постоянного крутящего момента не требует пояснений; ЧРП регулирует поток так, чтобы ток был постоянным.Как только частотный преобразователь частоты превышает номинальную частоту системы, напряжение не может увеличиваться из-за физических ограничений системы. Поскольку напряжение статично, а частота увеличивается, поток вынужден уменьшаться. Когда это происходит, ток и крутящий момент также уменьшаются. Это называется ослаблением поля. Хотя это не обязательно хорошо, это может быть полезно, если есть потребность в питании нагрузки с частичным крутящим моментом выше номинальной скорости. В дополнение к этой возможности, частотно-регулируемые приводы могут также принимать любую форму входного питания, будь то однофазный переменный ток, трехфазный переменный ток или постоянный ток.ЧРП, питаемые от источника постоянного тока, по-прежнему питают нагрузку переменного тока без внутреннего выпрямителя.
Частотные преобразователи также могут применяться в электросетях. Одним из классических примеров этого является индукционный генератор с двойным питанием, в котором частотно-регулируемый привод может выдавать сигнал фиксированной частоты и напряжения на вход переменной скорости (частоты). Это обычно наблюдается в ветряных турбинах и других проектах малых гидроэлектростанций, которые будут подключены к электросети. Другие возобновляемые источники энергии, такие как фотоэлектрические элементы, могут использовать частотно-регулируемые приводы для работы в качестве инвертора перед подключением к электросети, хотя инверторы с понижающей-повышающей технологией более распространены.Хотя существует множество потенциальных применений частотно-регулируемых приводов в коммерческой электросети, они выходят за рамки данной статьи.
Другие возобновляемые источники энергии, такие как фотоэлектрические элементы, могут использовать частотно-регулируемые приводы для работы в качестве инвертора перед подключением к электросети, хотя инверторы с понижающей-повышающей технологией более распространены.Хотя существует множество потенциальных применений частотно-регулируемых приводов в коммерческой электросети, они выходят за рамки данной статьи.
Таким образом, всякий раз, когда нагрузка имеет либо переменный крутящий момент, либо переменную скорость, следует рассмотреть возможность использования частотно-регулируемого привода. VFD можно рассмотреть, если у большого двигателя есть проблема с падением напряжения, крутящим моментом или пусковым током во время запуска. Несмотря на то, что частотно-регулируемые приводы, несомненно, решают изрядное количество проблем и обеспечивают значительную экономию энергии, выделяемое ими тепло необходимо рассеивать, а генерируемые ими гармоники необходимо ослаблять.
Новак — инженер-электрик в компании Fluor, Inc., Шугар Лэнд, Техас. С ним можно связаться по телефону [email protected].
Можно ли использовать частотно-регулируемый привод (ЧРП) на однофазном двигателе?
Не рекомендуется использовать один двигатель с частотно-регулируемым приводом. Хотя это технически возможно, недостатки намного перевешивают любые преимущества, которые вы могли бы ожидать. В большинстве случаев менее затратно перейти на трехфазный двигатель для использования с частотно-регулируемым приводом.
Блог по теме: частотно-регулируемый привод (ЧРП) Часто задаваемые вопросы
позволяют контролировать производительность системы, контролировать скорость двигателей или насосов и регулировать ток по запросу. ЧРП принимает входной трехфазный переменный ток, а затем выдает требуемый переменный или постоянный ток.h-l.png) Это позволяет двигателям эффективно работать при изменении нагрузки.
Это позволяет двигателям эффективно работать при изменении нагрузки.
Управление скоростью двигателя дает много преимуществ.Во-первых, частотно-регулируемый привод обеспечивает большую эффективность как с точки зрения использования мощности, так и с точки зрения передачи в насосе или двигателе. ЧРП определяет нагрузку на систему и выдает мощность для компенсации. Он также решает такие проблемы, как сбои в работе системы и перегрузки. Это автоматическое интеллектуальное управление может продлить срок службы двигателя, предотвратить отказ системы и повысить производительность.
Проблемы с использованием однофазного двигателяОднофазные двигатели намотаны иначе, чем трехфазные.Чтобы использовать однофазный двигатель с частотно-регулируемым приводом, двигатель должен быть инверторного класса, что означает оплату перемотки существующего двигателя или покупку нового двигателя. Даже если характеристики двигателя соблюдены, могут возникнуть проблемы с работой однофазного двигателя. Это чаще всего наблюдается на низких скоростях, когда двигатель вынужден работать на более низких оборотах.
Преимущества модернизации двигателяМодификация однофазного двигателя для работы с частотно-регулируемым приводом не является рентабельной.Вместо того, чтобы тратить ресурсы на внесение необходимых изменений, обычно лучше перейти на трехфазный двигатель. Помимо того, что трехфазные двигатели менее дороги, они часто меньше и легче. Модернизация означает более длительный срок службы системы, больший контроль производительности и предоставит дополнительные преимущества, такие как снижение рабочих температур.
Более 30 лет Mader Electric обеспечивает установку, обучение и техническое обслуживание насосных двигателей мощностью до 4000 лошадиных сил. Помимо того, что мы являемся ведущей компанией по производству насосов и двигателей в районе Сарасоты, у нас также есть современный учебный центр, чтобы помочь нашим клиентам быстро освоиться, как только установка будет завершена. Чтобы узнать больше о наших услугах по частотно-регулируемым приводам, свяжитесь с нами сегодня.
Чтобы узнать больше о наших услугах по частотно-регулируемым приводам, свяжитесь с нами сегодня.
Какие типы двигателей можно использовать с частотно-регулируемыми приводами?
Различные типы промышленных двигателей, которые могут использоваться с частотно-регулируемыми приводами:- Электродвигатель постоянного тока: электродвигатели постоянного тока все еще производятся, хотя количество активных производителей значительно сократилось, особенно тех, которые все еще производят большие электродвигатели постоянного тока (> 1 МВт).
- Асинхронный двигатель переменного тока с короткозамкнутым ротором: Этот тип двигателя является наиболее часто используемым двигателем в промышленных процессах с частотно-регулируемыми приводами.
- Асинхронный двигатель с фазным ротором: этот тип двигателя традиционно использовался в частотно-регулируемом приводе, когда нагрузка требовала высокого пускового момента, а мощность сети электропитания была недостаточной для прямого пуска от сети (DOL). Работа с переменной скоростью достигается за счет изменения эффективного сопротивления в цепи ротора.
- Синхронный двигатель переменного тока с бесщеточным или щеточным возбуждением.
- Синхронный двигатель переменного тока с возбуждением от постоянных магнитов: этот тип двигателя специально разработан для работы с частотно-регулируемым приводом.Синхронные двигатели используются в основном в диапазонах высокой мощности, чтобы минимизировать затраты за счет минимизации номинального тока преобразователя частоты и из-за отсутствия асинхронных двигателей с короткозамкнутым ротором.
Диапазон мощности частотно-регулируемых приводов типа VSI простирается от дробных кВт, таких как 0,18 кВт до 2 000 кВт в диапазоне низкого напряжения и от 200 кВт до 30 МВт в диапазоне среднего напряжения.
Частотно-регулируемые приводы | Landmark Electric, Inc.
Частотно-регулируемый привод (VFD) или частотно-регулируемый привод (VSD), привод переменного тока, микропривод или инверторный привод — это тип привода с регулируемой скоростью, который используется в электромеханических приводных системах для управления двигателем переменного тока. скорость и крутящий момент за счет изменения входной частоты и напряжения двигателя. ЧРП используются в самых разных приложениях, от небольших бытовых приборов до больших компрессоров. Около 25% мировой электроэнергии потребляется электродвигателями в промышленных приложениях, частотно-регулируемые приводы могут сделать эти двигатели более эффективными.За последние четыре десятилетия силовая электроника и технологии снизили стоимость и размер частотно-регулируемого привода и повысили производительность за счет достижений в полупроводниковых коммутационных устройствах, топологиях приводов, методах моделирования и управления, а также аппаратном и программном обеспечении управления.
При рассмотрении вопроса об использовании частотно-регулируемых приводов важно проконсультироваться с квалифицированным электриком из-за их большого разнообразия характеристик и тонкой настройки, необходимой для получения максимальной отдачи от их использования. По сравнению с обычными моторными приводами, частотно-регулируемый привод имеет более широкие функциональные возможности и возможности эксплуатации, что позволяет снизить потребление энергии и сократить расходы на техническое обслуживание в долгосрочной перспективе. Помимо регулируемого управления скоростью, частотно-регулируемые приводы обеспечивают защиту по фазе, пониженному и повышенному напряжению; в то время как программное обеспечение и возможности интерфейса частотно-регулируемого привода позволяют пользователю управлять двигателями на желаемых уровнях.
ЧРП содержит следующее;
- Выпрямитель — преобразует подачу переменного тока из сети в постоянный. Этот раздел может быть однонаправленным или двунаправленным в зависимости от используемого приложения, например, четырехквадрантного режима двигателя.В нем используются диоды, тиристоры, транзисторы и другие электронные переключающие устройства.
- Шина постоянного тока — питание постоянного тока от секции выпрямителя подается в промежуточный контур. Основная функция звена постоянного тока — накапливать энергию постоянного тока. Этот раздел содержит конденсаторы и катушки индуктивности. Инвертор
- — Эта секция состоит из электронных переключателей, таких как транзисторы, тиристоры, IGBT и т. Д. Он получает питание постоянного тока от промежуточного контура и преобразует его в переменный ток, который подается на двигатель. Он использует методы модуляции, такие как широтно-импульсная модуляция, для изменения выходной частоты для управления скоростью асинхронного двигателя.
- Цепь управления — состоит из микропроцессора и выполняет различные функции, такие как управление, конфигурирование параметров привода, условий сбоя и сопряжения протоколов связи. Он получает сигнал обратной связи от двигателя в качестве текущего задания скорости и, соответственно, регулирует отношение напряжения к частоте для управления скоростью двигателя.
Использование частотно-регулируемого привода может принести пользу многим типам оборудования, увеличивая экономию энергии и уменьшая износ. Вот несколько общих преимуществ VFD:
- Контроль пускового тока
- Снижение нарушений в ЛЭП
- Управляемые ускорения
- Регулируемая рабочая скорость
- Регулируемый предел крутящего момента
- Управляемая остановка
В Landmark Electric, Inc мы можем помочь оценить ваши потребности и решить, что и где частотно-регулируемый привод может вам помочь.
 Свяжитесь с нами сегодня!
Свяжитесь с нами сегодня!Как использовать VFD (частотно-регулируемый привод) — Технический документ
Прежде чем узнать, как использовать VFD, нужно сначала понять, что это такое и для какой цели служит элемент управления в приложении.
ЧАСТЬ 1: Что такое регулирование скорости двигателя переменного тока?
Устройство управления скоростью двигателя переменного тока, также известное как частотно-регулируемый привод, преобразователь частоты, привод с регулируемой скоростью, привод с регулируемой скоростью и инвертор переменного тока, представляет собой электромеханический объект, который можно использовать для изменения выходной скорости двигателя переменного тока путем регулировка входной частоты двигателя.
Регулировка скорости может быть легко выполнена с помощью частотно-регулируемого привода (ЧРП) с двигателем переменного тока, и это наиболее частая причина их использования. ЧРП позволяют регулировать минимальную и максимальную скорость, на которой работает приложение, осуществлять плавный пуск и остановку, а также компенсировать изменение скорости из-за скольжения. Однако есть и другие преимущества, которые могут быть получены от использования управления скоростью двигателя переменного тока.
Приводы двигателя переменного токаGroschopp обеспечивают экономию энергии для пользователя, защищают двигатель от токовых перегрузок и продлевают срок его службы.
ЧАСТЬ 2: Изменение скорости двигателя переменного тока
Для двигателей переменного тока существует три фактора, которые могут изменить скорость двигателя: количество полюсов, частота и нагрузка. Каждый фактор будет обсуждаться в этом разделе.
Магнитные полюса и скорость двигателя
Электродвигатели переменного тока имеют магнитные полюса как часть их конструкции, что означает, что полюс двигателя (и, следовательно, скорость) не может измениться после того, как они построены. 2-полюсный двигатель с частотой 60 Гц будет иметь синхронную скорость примерно 3600 об / мин, а 4-полюсный двигатель с той же частотой будет иметь синхронную скорость только 1800 об / мин. Эти скорости останутся относительно постоянными независимо от крутящего момента приложения.
Эти скорости останутся относительно постоянными независимо от крутящего момента приложения.
Входная частота и скорость двигателя
Второй способ изменить скорость двигателя переменного тока — это изменить частоту, с которой двигатель работает. Например, двигатели, работающие от стандартной мощности в Соединенных Штатах, работают с частотой входной мощности 60 Гц, а в европейской стране используется частота 50 Гц.
Если двигатель не предназначен для работы на необходимой предоставленной частоте, не рекомендуется просто изменять частоту двигателя, так как это может вызвать несколько проблем, включая перегрев и потерю мощности.ЧРП могут использоваться для управления скоростью двигателя переменного тока путем изменения частоты двигателя без ущерба для выходной мощности двигателя. Это делается путем поворота регулятора скорости (объясненного в разделе 3) привода двигателя переменного тока.
Посетите блог «What’s Your Frequency», чтобы получить дополнительную информацию о частотах двигателя.
Нагрузка приложения и скорость двигателя
При выборе частотно-регулируемого привода для двигателя, правильный выбор будет зависеть от требований к рабочей нагрузке приложения.Чем выше нагрузка и, следовательно, больший крутящий момент, необходимый для приложения, тем выше будет потребляемый двигателем ток. Поскольку частотно-регулируемые приводы рассчитаны на основе их постоянного выходного тока (в амперах), важно выбрать привод с достаточным током, доступным для двигателя, для оптимальной производительности.
Следует учитывать три категории нагрузки: постоянный крутящий момент, переменный крутящий момент и постоянная мощность.
Постоянная нагрузка крутящего момента — крутящий момент остается неизменным независимо от скорости.Удвоенная скорость означает удвоенную требуемую мощность. Подумайте о конвейерах и миксерах.
Переменная нагрузка крутящего момента — крутящий момент увеличивается с увеличением скорости. Удвоенная скорость означает, что требуется более чем удвоенная мощность. Подумайте о насосах и вентиляторах.
Удвоенная скорость означает, что требуется более чем удвоенная мощность. Подумайте о насосах и вентиляторах.
Постоянная силовая нагрузка — Крутящий момент уменьшается с увеличением скорости. Удвоенная скорость означает неизменную требуемую мощность. Подумайте о шлифовальных машинах и пилах.
На следующей диаграмме показано визуальное сравнение этих категорий нагрузки на примере прямоугольного мотор-редуктора переменного тока Groschopp.Формулу для расчета этих значений можно найти в блоге «Что такое лошадиные силы». Если нагрузка представляет собой нагрузку с постоянной мощностью, двигатель, используемый в примере, будет работать. Если это зависит от других типов нагрузки, двигатель не будет иметь достаточной мощности для правильной работы. Для работы с такими нагрузками повышенной мощности потребуется двигатель большей мощности с частотно-регулируемым приводом правильного размера.
ЧАСТЬ 3: Регулировка частотно-регулируемого привода
Чтобы лучше понять возможности управления производительностью двигателя переменного тока, важно сначала изучить анатомию регулятора скорости двигателя.На следующей схеме изображены ручки и переключатели (перемычки и подстроечные резисторы), которые можно найти на частотно-регулируемых приводах Groschopp. Не все элементы управления будут выглядеть одинаково внутри, но эта диаграмма должна служить отправной точкой для других элементов управления.
Перемычки регулировочные
J1 (верхняя плата) — 230 В / 115 В — Эта перемычка позволяет переключаться между входным напряжением 230 и 115 В переменного тока. Он поставляется с предустановкой на 230 В.
Использование контроллера мотора позволяет запускать трехфазный двигатель 230 В при питании 115 В, что приводит к более надежному двигателю с гораздо более высоким пусковым моментом.
J1 (нижняя плата) — 50/60 Гц — Эта перемычка позволяет переключать двигатели с номинальной частотой 50 Гц и 60 Гц.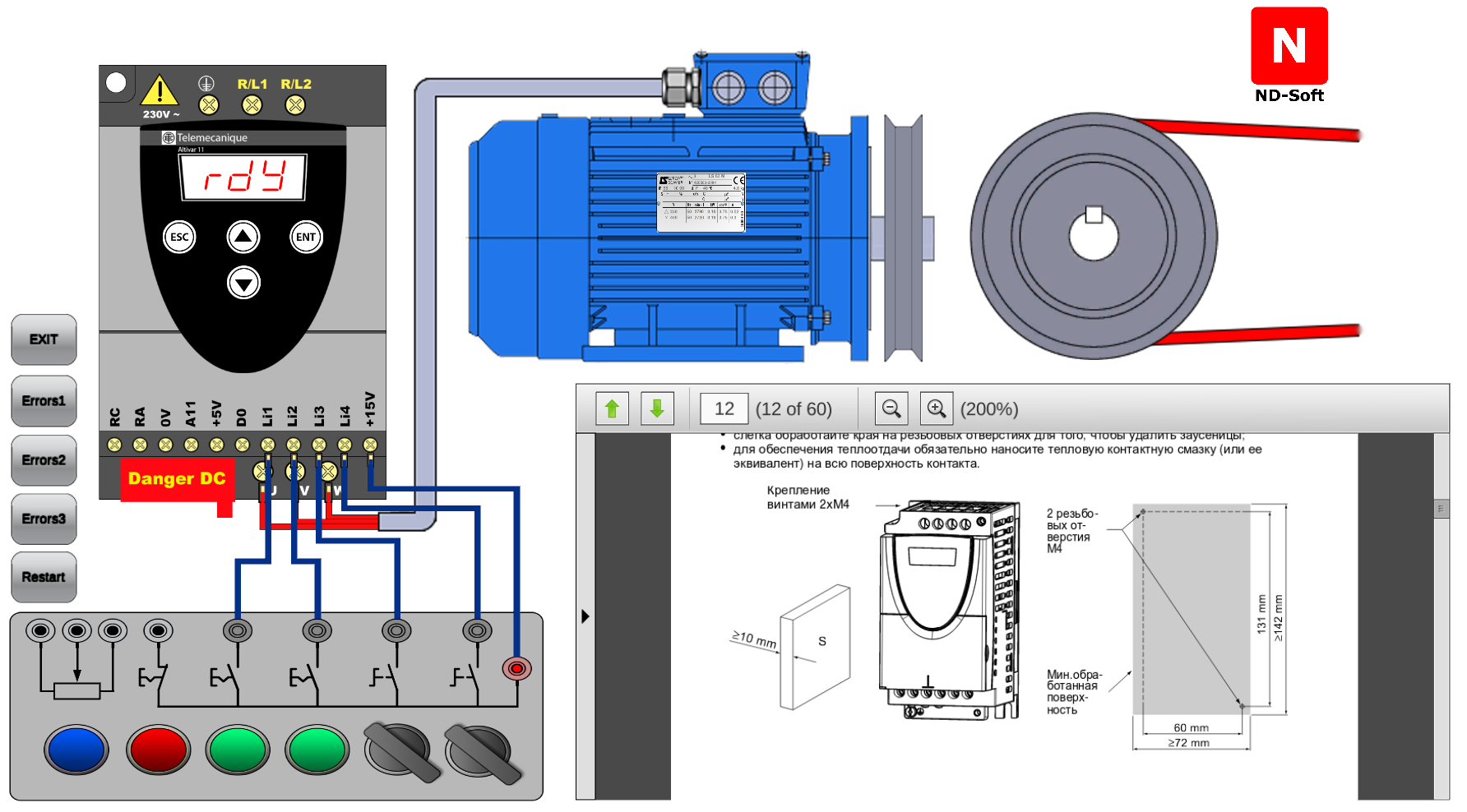 По умолчанию установлено значение 60 Гц.
По умолчанию установлено значение 60 Гц.
Вход привода может обрабатывать 50 Гц или 60 Гц, независимо от того, какая частота установлена перемычкой. Эта перемычка предназначена для переключения двигателя с номинальной частотой 50 Гц или 60 Гц. Для двигателей Groschopp и других двигателей американского производства эта перемычка уже точно установлена на 60 Гц и, вероятно, будет использоваться нечасто.
J2 (нижняя плата) — 2x об / мин. — Эта перемычка позволяет двигателю вращаться до удвоенной номинальной скорости.Поставляется с предустановкой 1x. Если J2 установлен на 2x, тогда двигатель будет иметь постоянную мощность выше номинальной скорости.
Для приложений, которым требуется более высокая скорость, чем та, которую предлагает их двигатель в настоящее время, но которые не могут позволить себе снизить крутящий момент или мощность двигателя, частотно-регулируемый привод является оптимальным решением. Пока двигатели способны работать на более высоких скоростях — двигатели Groschopp — можно использовать управление для выполнения необходимых регулировок.
CON1 — A / M — Эта перемычка переключает между автоматическим и ручным запуском.Он поставляется с предустановкой на автоматический запуск. При автоматическом запуске привод автоматически запускает двигатель при подаче питания. Он также автоматически перезапустится после сбоя (недостаточный ток, перегрузка по току, короткое замыкание). При ручном пуске на контакты вместо перемычки устанавливается двухпроводной разъем из комплекта поставки. 2-проводной разъем должен быть подключен к выключателю без фиксации. Привод не будет работать автоматически при включении; он будет работать только при замкнутом переключателе. Точно так же привод не перезапустится автоматически после сбоя, переключатель необходимо замкнуть вручную.
Ручной режим можно использовать в ситуациях, когда важна безопасность. Например, приложения, которые могут быть заблокированы, должны использовать ручной сброс, чтобы двигатель не запускался автоматически, прежде чем он станет безопасным.
CON2 F-S-R — вперед-стоп-назад — Эти штифты позволяют добавить переключатель для изменения направления вращения двигателя. Для этого можно использовать трехпозиционный переключатель. Эти контакты можно использовать для включения / выключения двигателя.
Переключатель прямого / обратного останова позволяет подавать питание на блок управления, но блок управления не питает двигатель.Используя это, система управления может по-прежнему обмениваться данными с программируемым логическим контроллером (ПЛК) без подачи питания на двигатель. Этот переключатель также устраняет необходимость в использовании реле, которое может быть больше и дороже, чем переключатель F-S-R.
Регулировка триммера
CL — Ограничение по току — Устанавливает ограничение по току и ограничивает максимальный ток двигателя с использованием метода I2t для предотвращения перегрузки двигателя и ложных отключений. Элементы управления устанавливаются на 160% от номинального тока управления.Если номинальный ток двигателя отличается от номинального тока управления, CL следует установить на 160% от номинального тока двигателя.
Если двигатель потребляет слишком большой ток, он отключится для защиты двигателя. Если CON1, упомянутый ранее, установлен на «ручной», ограничение тока необходимо вручную сбросить, чтобы двигатель снова начал работать. Это можно сделать, выключив и перезапустив систему.
MAX — Максимальная скорость — Заводская установка 100% от установленной частоты.Поворот этого потенциометра против часовой стрелки ограничивает максимальную скорость до более низкой скорости. Поворот этого потенциометра по часовой стрелке ограничивает максимальную скорость до более высокой скорости.
Максимальный потенциометр скорости может быть установлен от 70% до 110% от настройки частоты привода (50 Гц, 60 Гц или если перемычка 2x установлена на 100 Гц или 120 Гц). Типичный диапазон скорости от 10% до 200% может быть установлен с помощью двигателя переменного тока Groschopp и комбинации управления при сохранении крутящего момента и хорошего регулирования скорости.
MIN — Минимальная скорость — Заводская установка 0% от установленной частоты.Поворот этого потенциометра против часовой стрелки ограничивает минимальную скорость до более низкой скорости. Поворот этого потенциометра по часовой стрелке ограничивает минимальную скорость до более высокой скорости.
Вместо того, чтобы использовать коробку передач с настраиваемым передаточным числом для достижения действительно низких скоростей, можно использовать управление. Важно отметить, что работа двигателя переменного тока на очень низких скоростях — обычно ниже 10% от номинальной скорости — снижает возможность регулирования скорости, а также уменьшается номинальный крутящий момент двигателя.
DEC / B — Deceleration — Устанавливает время, необходимое двигателю для замедления от полной скорости до нулевой скорости.Заводская установка составляет 1,5 секунды и может быть увеличена поворотом по часовой стрелке и уменьшена поворотом против часовой стрелки. Для высоких инерционных нагрузок рекомендуется увеличить время замедления.
Для некоторых применений, таких как конвейеры или погрузочно-разгрузочное оборудование, необходимо использовать двигатель с постепенной остановкой, чтобы предотвратить повреждение как двигателя, так и материалов.
ACC — Acceleration — Устанавливает время, необходимое двигателю для разгона от нулевой скорости до полной скорости.Заводская установка составляет 1,5 секунды и может быть увеличена поворотом по часовой стрелке и уменьшена поворотом против часовой стрелки. Быстрое ускорение может привести к срабатыванию цепи ограничения тока.
Использование немного более длительного времени запуска может увеличить срок службы двигателя, поскольку он подвергается меньшему току каждый раз, когда ему необходимо разогнаться до полной скорости. Это особенно верно для приложений с прерывистым режимом работы, которые часто запускаются и останавливаются.
COMP — Компенсация скольжения — Все асинхронные двигатели переменного тока будут снижать скорость по мере приложения крутящего момента.