
Шаговый двигатель
Дмитрий Левкин
- Конструкция
- Характеристики
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.

Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода.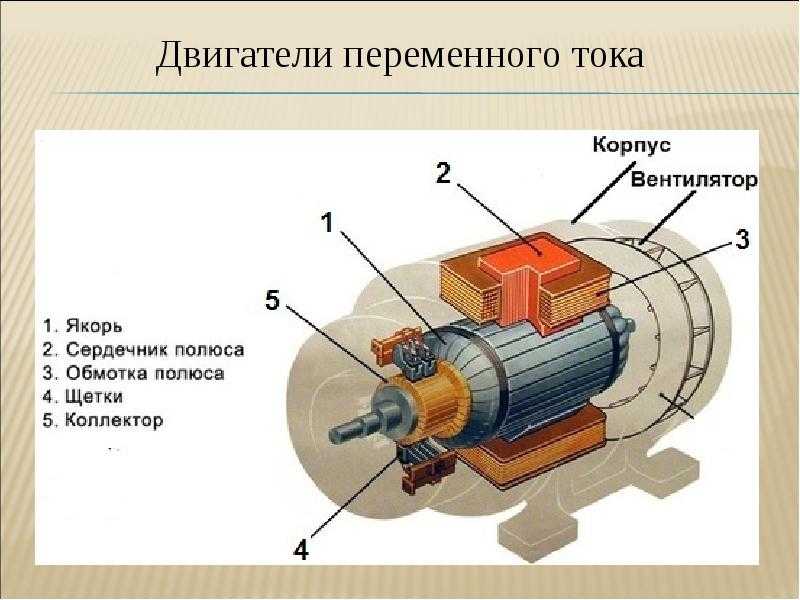 Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.

Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями.
 Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага; - полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
Библиографический список
Электронные двигатели DRC.. | SEW-EURODRIVE
Электронный двигатель DRC.. дополнили ассортимент наших мехатронных приводов для децентрализованных систем и представляют собой высокоэффективные решения с маскимальной вариативностью для выполнения различных типов задач, не только для использования в стандартных системах перемещения грузов.
В высшей степени эффективно: электронные двигатели DRC.
 … с классом эффективности IE4
Электронные двигатели DRC.. с классом эффектвиности IE4
Электронные двигатели DRC.. с классом эффектвиности IE4
… с классом эффективности IE4
Электронные двигатели DRC.. с классом эффектвиности IE4
Электронные двигатели DRC.. с классом эффектвиности IE4
В компактную конструкцию электронных двигателей DRC.. входят встроенные электронные органы управления и синхронный двигатель с постоянными магнитами, что представляет собой идаеальное решение для децентрализованных систем, в которых максимальная вариативность редукторов играет решающую роль. В комбинации с высокоэффективными цилиндрическими, коническими редукторами или плоскими цилиндрическими редукторами, а также в качестве отдельного оборудования наши электронные двигатели DRC.. представляют собой высокоэффективные, децентрализованные приводы. Электронные двигатели DRC.. поддерживают те же протоколы обмена данными, что и MOVIGEAR®, и предлагаются в четырех типаразмерах с диапазоном мощности 0,55–4 кВт. Благодаря этому достигается непрерывный вращающий момент 2,6 Нм или 19,1 Нм.
Эти особенностии и беспроблемная интеграция компонентов делают электронные двигатели DRC.. интеллектуальным мехатронным приводом, обеспечивающим высокий уровень надежности и долговечности. Что, в свою очередь, гарантирует высокую эксплуатационную готовность системы и обеспечивает максимальнуюэксплуатационную надежность.
Практическая гибкость, высокая энергоэффективность и исключительная производительность делают электронные двигатели DRC.. экономичным, прогрессивным решением, идеально соответствующим Вашим нуждам.
Сконфигурировать Ваше специализированное изделие
- Подробная информация о Вашем сипециализированном изделии
- Данные САПР-системы и документация для конфигурирования Вашего изделия
- Возможность напрямую запросить коммерческое предложение или разместить заказ
Настроить продукт
Наверх
Ваши преимущества
-
Плюсы программы энергоэффективности
Высокая эффективность системы гарантирует снижение потребления электроэнергии вплоть до 50 % по сравнению с классическими приводами -
Сокращение количества вариантов установленного оборудования
Благодаря диапазону частоты вращения с постоянным, непрерывным вращающим моментом и режимом большого вращающого момента при перегрузке, оборудование в одном исполнении может использоваться для выполнения нескольких задач -
Простой монтаж
Электропитание и передача данных по одному кабелю позволяют снизить расходы на установку и риск ошибок -
Экономия пространства
Полная интеграция компонентов и компактная конструкция не требует большого установочного пространства, что не сказывается на производительности -
Учет рентабельности проекта на этапе планирования
Расходы на хранение запасных деталей и общие эксплуатационные расходы снижены благодаря конструктивным особенностям оборудования и его преимуществам
Наверх
Технические данные
Закрыть таблицу
| Серии | Номинальная мощность кВт | Диапазон управления | Номинальный момент Нм | Максимальный момент Нм |
|---|---|---|---|---|
| DRC1 | 0,55 | 1/2000 | 2,65 | 6,6 |
| DRC2 | 1,5 | 1/2000 | 7,20 | 18 |
| DRC3 | 3 | 1/2000 | 14,3 | 35,8 |
| DRC4 | 4 | 1/2000 | 19,1 | 36,2 |
Здесь находится сохраненная таблица.
Особенности
Благодаря уникальной конструкции и классу энергоэффективности IE4 гибкие, универсальные электронные двигатели используются на мировых производствах со следующими характеристиками потребляемого тока: 380–500 В и частота 50/60 Гц.
- Полные мехатронные приводные системы в комбинации с высокоэффективными цилиндрическими, коническими редукторами или плоскими цилиндрическими редукторами, а также двигатели, использующиеся в качестве самостоятельного оборудования,
- Стандартные фланцы для использования с нашими редукторами серии 7
- Фланцы IEC для двигателей, использующихся в качестве самостоятельного оборудования, и для монтажа адаптеров
- Дополнительный механический тормоз
- Встроенная функция безопасного отключения момента
Децентрализованная обработка сигналов датчиков и приводов
Благодаря дополнительным модулям GIO12 и GIO13 электронные двигатели DRC. . напрямую считывают и обрабатывают сигналы датчиков и приводв в непосредственной близости от установленного привода. Данные опци поддерживаются оборудованием серий SNI и DSC:
. напрямую считывают и обрабатывают сигналы датчиков и приводв в непосредственной близости от установленного привода. Данные опци поддерживаются оборудованием серий SNI и DSC:
Дополнительный модуль GIO12B
- Управление макс. 2 цифровыми приводами
- Обработка сигналов вплоть до 4 цифровых датчиков
Дополнительный модуль GIO13B
- 1 цифровой выход
- 4 цифровых входа (2 из которых могут использоваться в качестве входов для сигналов основной частоты)
- 1 аналоговый выход
- 1 аналоговый вход
Сетевая топология
Электроныне двигатели DRC.. с однопроводным сетевым подключением (SNI)
- Провода электропитания одноврменного используются в качестве сигнальных
- Значительное сокращение времени на установку, так как требуется только подключение кабелей питания
- Сетевое подключение приводов осуществляется с удлинителями общей длиной до 100 м и возможностью подключения до 10 устройств
Электронные двигатели DRC.
 . с системой шины (DSC)
. с системой шины (DSC)
- Приводы для производств, где они устанавливаются в непосредственной близости от оборудования, требующего высокой приводной мощности и высокой скорости передачи данных по шине
Электронные двигатели DRC.. с управлением через двоичные сигналы (DBC)
Электронные двигатели DRC.. (DAC)
- Стандартный интерфейс полевой шины
- Быстрая, рентабельная интегпция в системы перемещения грузов на производствах
- Конфигурируемые постоянные обороты и кривые линейного изменения значений
- Встроенная функция безопасного отключения момента
Диапазон сфер применения
Вы можете использовать электронные двигатели DRC.. в системах перемещения грузов или в качестве универсального двигателя для логистических систем, например:
- Внутрипроизводственная логистика
- Логистика аэропортов
- Пищевая промышленность и производство напитков
- Автомобильная промышленность
Наверх
Наверх
Электродвигатели | www.
 surpluscenter.com Электродвигатели | www.surpluscenter.com
surpluscenter.com Электродвигатели | www.surpluscenter.comЭтот сайт лучше всего просматривать с включенным Javascript. Некоторые функции не будут работать без Javascript. Для наилучшего взаимодействия с пользователем включите Javascript.
категория
- Электродвигатели
Однофазные двигатели переменного тока (8)
- Основание для двигателей переменного тока
- Двигатели переменного тока с торцевым креплением
- Сельскохозяйственные двигатели
- Двигатели воздушного компрессора
- Промывка двигателей
- Двигатели вентиляторов и кондиционеров
- Двигатели для спа-бассейнов и струйных насосов
- Двигатели переменного тока специального назначения
См. все однофазные двигатели переменного тока
все однофазные двигатели переменного тока
двигатели постоянного тока (5)
- Основание для двигателей постоянного тока
- Двигатели постоянного тока с торцевым креплением
- Двигатели вентиляторов постоянного тока
- Двигатели постоянного тока специального назначения
- Контроллеры скорости двигателя
См. все двигатели постоянного тока
все двигатели постоянного тока
Мотор-редукторы постоянного тока (2)
- Мотор-редукторы постоянного тока
- Двигатели стеклоочистителя постоянного тока
См. все мотор-редукторы постоянного тока
Трехфазные двигатели переменного тока (5)
- Основание для трехфазных двигателей
- 3-фазные двигатели с торцевым креплением
- 3-фазные насосы и двигатели для промывки
- Преобразователи фазы
- Преобразователи частоты
См. все трехфазные двигатели переменного тока
все трехфазные двигатели переменного тока
Линейные приводы (3)
- Линейные приводы постоянного тока
- Принадлежности линейного привода
- Линейные приводы переменного тока
См..jpg) все Линейные приводы
все Линейные приводы
Мотор-редукторы переменного тока (2)
- Мотор-редукторы переменного тока
- Линейные приводы переменного тока
См. все мотор-редукторы переменного тока
Крепления для электродвигателей (2)
- Основания для направляющих электродвигателей
- Адаптеры электродвигателя к насосу
См. все крепления электродвигателей
все крепления электродвигателей
© Copyright 2023 Surplus Center, Все права защищены
Новый электрический лодочный мотор использует ветер и воду для подзарядки батарей
Возможно, он не обеспечивает бесконечный запас хода, но он близок к этому. Новый парусный привод Oceanvolt ServoProp имеет функцию регенерации, которая эффективно заряжает электрические батареи лодки во время плавания.
Многие думают, что парусники двигаются исключительно с помощью ветра. В то время как меньшие парусники обычно таковы, большинство парусников приличного размера имеют мотор для маневрирования в марине или когда ветер стихает.
Двигатели Saildrive — это инновационная силовая установка, широко используемая на современных парусных судах, которая представляет собой компактную и эффективную альтернативу традиционным стационарным двигателям с приводом от вала.
Разработанные с гладким профилем с малым лобовым сопротивлением, парусные приводы встроены в корпус и состоят из двигателя, установленного непосредственно над ведущей ногой, проходящей через корпус, с гребным винтом на нижнем конце. Эта конфигурация не только снижает вибрацию и шум, но также сводит к минимуму сложность установки и обслуживания.
Эта конфигурация не только снижает вибрацию и шум, но также сводит к минимуму сложность установки и обслуживания.
Двигатели Saildrive обеспечивают плавную, эффективную подачу мощности и дополнительную маневренность. Их обтекаемый дизайн способствует улучшению ходовых качеств за счет снижения лобового сопротивления. В результате сейлдрайвы стали популярным выбором среди современных любителей парусного спорта, ищущих баланс между производительностью, простотой использования и меньшим воздействием на окружающую среду.
Преимущество электрических парусных двигателей состоит в том, что они обеспечивают гидрорегенерацию — уникальное преимущество, которое может помочь перезарядить аккумуляторы электрических парусных лодок. При плавании под действием ветра электродвигатель фактически толкается назад водой, движущейся по гребному винту. Это превращает двигатель в генератор, который может отправлять энергию обратно в батареи для последующего использования.
Пример лопастей с регулируемым шагом ServoProp 15 компании Oceanvolt Компания Oceanvolt широко известна как лидер в области гидрорегенерирующих двигателей, получивших награды за свои двигатели уже несколько лет, согласно Plugboats . В парусных двигателях компании используются гребные винты с лопастями переменного шага, что в сочетании со способностью двигателя вращаться на 360 градусов создает наиболее эффективную среду как для движения, так и для гидрорегенерации.
В парусных двигателях компании используются гребные винты с лопастями переменного шага, что в сочетании со способностью двигателя вращаться на 360 градусов создает наиболее эффективную среду как для движения, так и для гидрорегенерации.
Новейший HighPower ServoProp 25 компании — самая мощная модель в своей линейке, способная рекуперировать 5 кВт мощности при движении со скоростью около 10 узлов. По словам компании, будущие обновления программного обеспечения, которые улучшат производительность парусного привода, позволят ему производить еще большую мощность с большей эффективностью.
Управляемый из кабины, ServoProp 25 может переключаться с регенерации на движение нажатием кнопки. Показания для оператора показывают текущий режим работы парусного привода, генерируемую мощность, число оборотов в минуту и время, оставшееся до перезарядки аккумуляторов 48 В.
Помимо очевидных преимуществ по сравнению с двигателями внутреннего сгорания, таких как более тихая работа и отсутствие вредных выбросов, вся система имеет цифровое управление, что упрощает установку. Система водяного охлаждения, контроллер двигателя и контроллер лезвия встроены в устройство, что еще больше упрощает процесс установки.
Система водяного охлаждения, контроллер двигателя и контроллер лезвия встроены в устройство, что еще больше упрощает процесс установки.
Вернувшись в двигательный режим, двигатель может непрерывно выдавать 25 кВт, хотя его пиковая мощность составляет 30 кВт в течение 15 минут. Как это обычно бывает с электрическими лодочными моторами, их меньшая мощность эквивалентна гораздо более мощному двигателю внутреннего сгорания. В этом случае Oceavolt говорит, что номинальная мощность 25 кВт аналогична по производительности приводу двигателя внутреннего сгорания мощностью 75 кВт (100 л.с.).
Мгновенный крутящий момент и сила тяги в 5000 ньютонов (приблизительно 1100 фунтов) являются основными преимуществами электрической установки.
Парусный привод весом 419 фунтов (190 кг) подходит в качестве силового двигателя для лодок длиной до 70 футов и весом до 27,5 тонн США (25 метрических тонн).
Его также можно использовать в качестве гидрорегенератора отдельно в емкостях значительно большего размера.