
Как определить скорость вращения электродвигателя
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов.

Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В.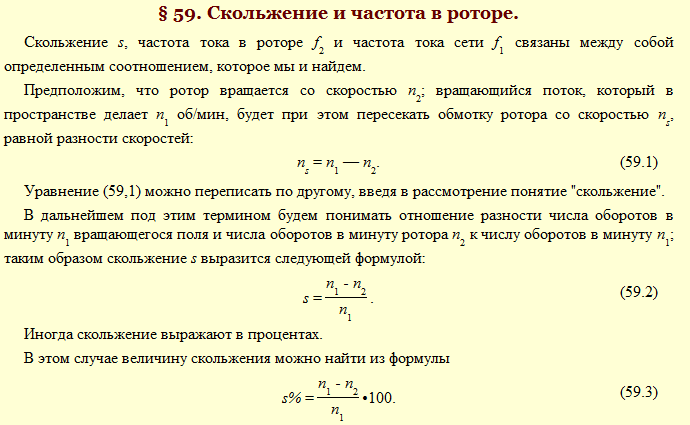 Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.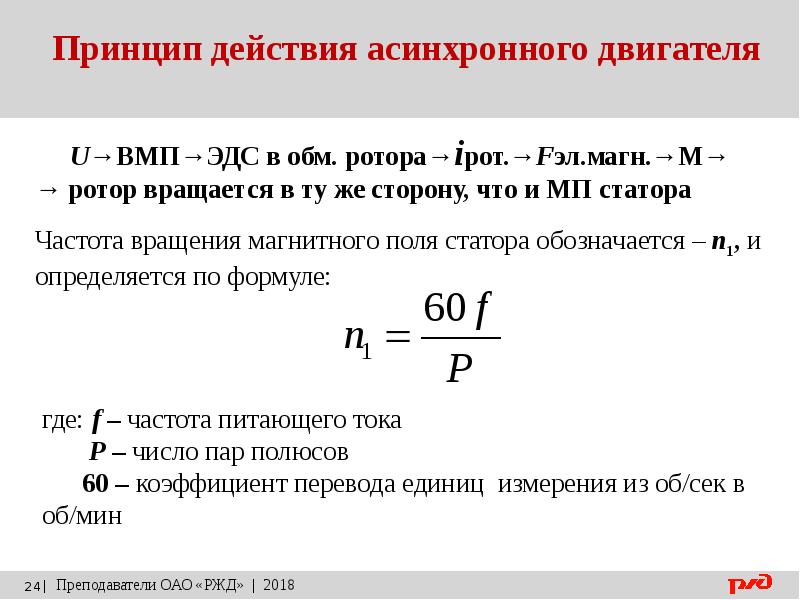
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором.
 При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений; - Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип.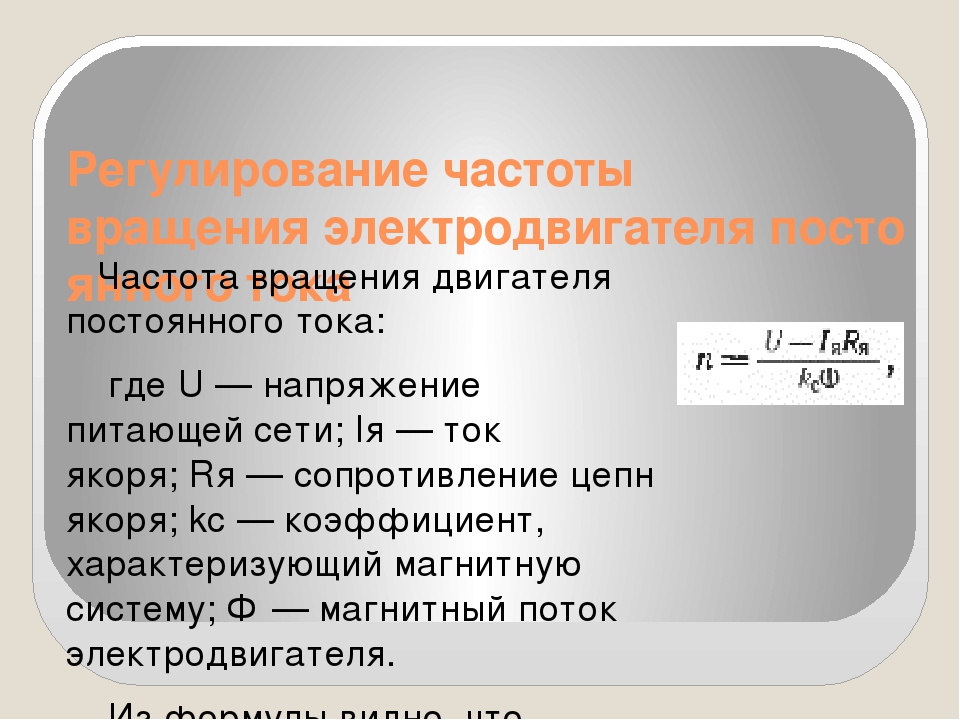 Электромотор развивает мощность в 1000 оборотов.
Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами.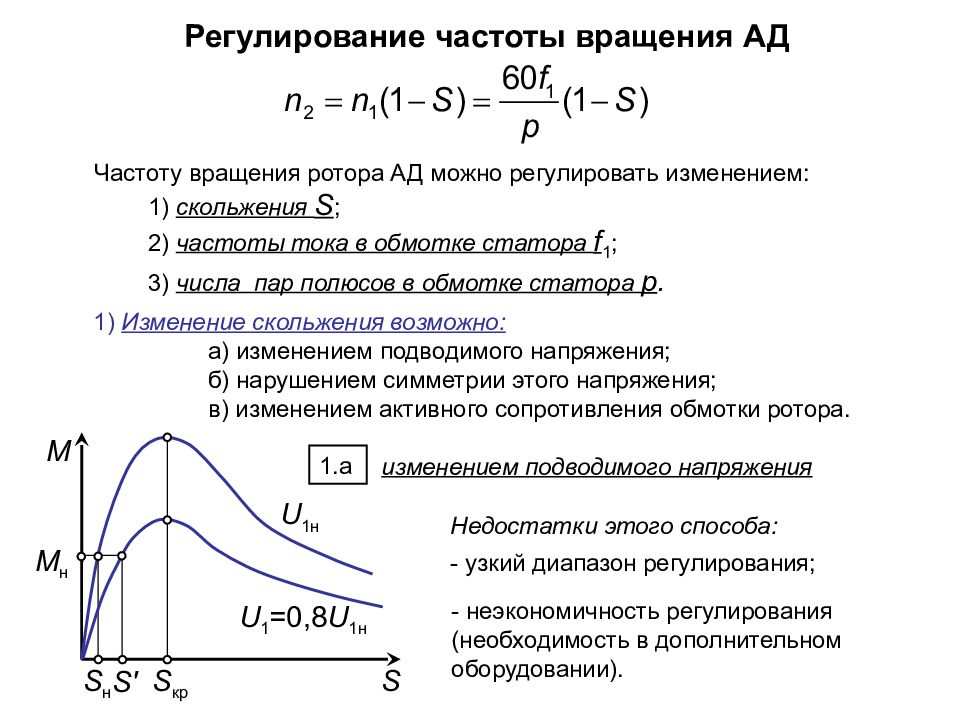 Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.

- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине.
 Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора. - Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.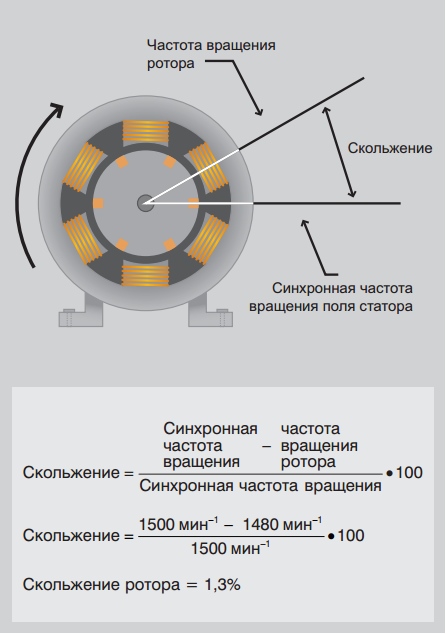
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту.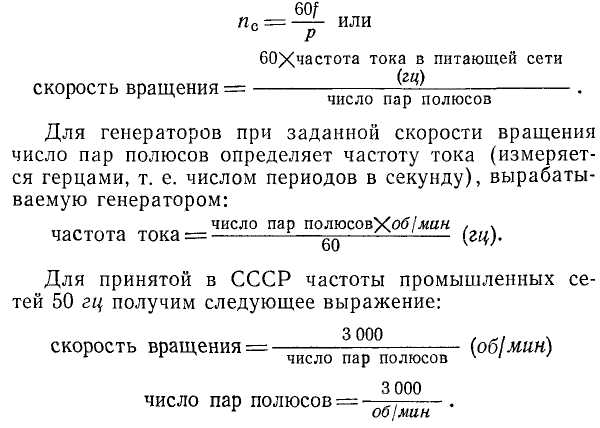 От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе. Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
Как определить скорость вращения электродвигателя
Главное меню:
- Основы
- Электромашины
- Оборудование
- Нормы
- Подстанция
- Комплектные трансформаторные подстанции
- Оборудование подстанций
- Вакуумные выключатели
- ВВ/TEL
- ВР
- ВРО
- ВР1
- ВР1 для КСО
- ВРС
- 3АН5
- ВГГ-10
- Камеры КСО
- Ограничители перенапряжений 6(10) кВ
- Масляный выключатель
- ВПМ-10
- Техническое описание ВПМ
- ВМП-10
- ВМГ-133
- Выключатель нагрузки автогазовый ВНА
- Описание выключателя
- Изображение выключателя
- Ремонт электрооборудования
- Повышение надежности МВ, приводов МВ
- Установки компенсации реактивной мощности
- Общие сведения об УКРМ
- УКРМ 0,4 кВ
- УКРМ 6(10) кВ
- Выбор места расположения питающих подстанций
- Электроснабжение
- Освещение
- Воздушная линия
Основы > Задачи и ответы > Сборник задач — электрические машины
Асинхронные электродвигатели (страница 2)
1.
Определить угловую скорость вращении ротора асинхронного электродвигателя, если обмотка статора четырехполюсная, частота напряжения сети, к которой присоединен электродвигатель, 50 Гц и скольжение ротора равно 3,5%.Решение: Частота токов, проходящих в обмотках статора, равна частоте напряжения сети: Кроме того, известно, что обмотка статора четырехполюсная, т. е. число пар полюсов р = 2.
Скорость вращения магнитного потока, вызываемого трехфазной системой токов, проходящих в обмотках статора, зависит от частоты этих токов
и числа пар полюсов обмотки р, так как , откуда число оборотов в минуту вращающегося синхронно магнитного потока Угловая скорость вращения Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением: — скорость вращения магнитного потока; — скорость вращения ротора.Подставив числовые значения, получим Угловая скорость вращения ротора2.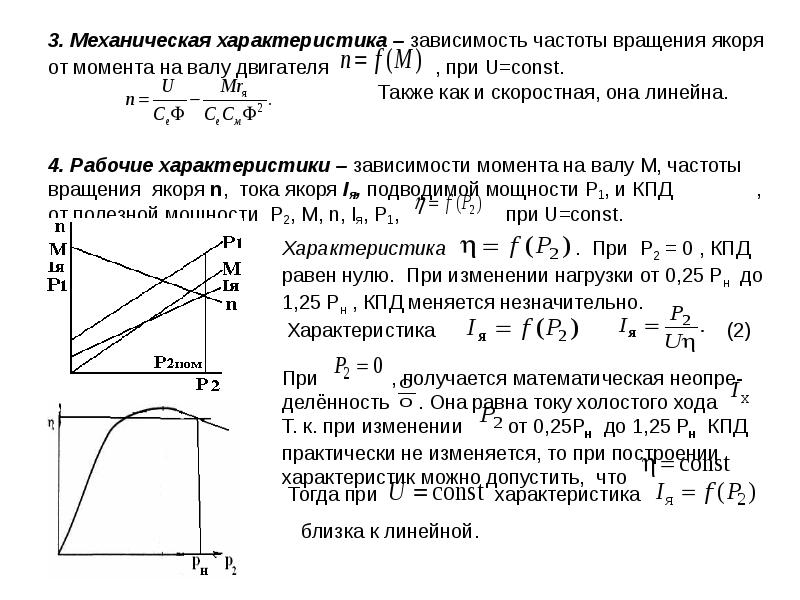 На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .Следовательно, скольжение ротора Число пар полюсов обмотки статора
На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .Следовательно, скольжение ротора Число пар полюсов обмотки статора
В момент пуска ротор неподвижен
. Поэтому скольжение при пуске Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Таблица 13
| р пар полюсов | 1 | 2 | 3 | 4 | 5 |
| n, об/мин | 3000 | 1500 | 1000 | 750 | 600 |
3.
В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
Решение:
Полное колебание указательной стрелки соответствует полному периоду тока в обмотке ротора. Если 60 полных колебаний (периодов) произошло за полминуты, то число полных колебаний (периодов) в секунду равно двум. Следовательно, Магнитный поток в асинхронном электродвигателе вращается относительно ротора со скоростью, равной разности скоростей: причем частота тока в роторе Подставив числовые значения, получим
При шестиполюсной обмотке статора и частоте токов в цепи статора
скорость вращения магнитного потока
Подставим в выражение для
откуда скорость вращения ротора4. Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.Определить коэффициент трансформации, рассматривая этот электродвигатель как трансформатор в режиме холостого хода, если обмотки статора и ротора соединены звездой.Решение: Фазное напряжение на обмотке статора при схеме соединения звездой в раз меньше линейного напряжения. Следовательно, Фазное напряжение на обмотке ротора Коэффициент трансформации фазных напряжений5. Асинхронный электродвигатель с короткозамкнутым ротором характеризуется отношением вращающих моментов соответственно при пуске и при номинальном режиме .Можно ли осуществить пуск двигателя в случае полной его нагрузки на валу и понижения напряжения в сети на 5 и 10%? К сети присоединен статор.Решение: Вращающий момент асинхронного двигателя прямо пропорционален квадрату напряжения в сети:
Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.Определить коэффициент трансформации, рассматривая этот электродвигатель как трансформатор в режиме холостого хода, если обмотки статора и ротора соединены звездой.Решение: Фазное напряжение на обмотке статора при схеме соединения звездой в раз меньше линейного напряжения. Следовательно, Фазное напряжение на обмотке ротора Коэффициент трансформации фазных напряжений5. Асинхронный электродвигатель с короткозамкнутым ротором характеризуется отношением вращающих моментов соответственно при пуске и при номинальном режиме .Можно ли осуществить пуск двигателя в случае полной его нагрузки на валу и понижения напряжения в сети на 5 и 10%? К сети присоединен статор.Решение: Вращающий момент асинхронного двигателя прямо пропорционален квадрату напряжения в сети:
Следовательно, если напряжение в сети понизится на 5% и составит
Так как пусковой момент при номинальном напряжении , то при понижении напряжения в сети на 5% пусковой момент Таким образом, пуск при этих условиях позволит электродвигателю развить вращающий момент больше номинального.
Если напряжение в сети понизится на 10% и составит
Пусковой момент при указанном понижении напряжения долю, которую составляет пусковой вращающий момент от вращающего момента при номинальном напряжении. Тогда для возможности пуска электродвигателя при номинальной нагрузке должно быть выполнено равенство Поэтому при пуске электродвигателя напряжение сети может составлять от номинального напряжения долю
Таким образом, при заданной кратности пускового момента от номинального
понижение напряжения в сети может происходить на и пуск может быть осуществлен при номинальной нагрузке на валу электродвигателя.
6. Асинхронный электродвигатель с короткозамкнутым ротором типа А51-4 имеет следующие номинальные данные: ; кратность вращающих моментов .
Определить вращающие моменты: номинальный , максимальный и пусковой Решение:
Номинальный вращающий момент можно определить из основного соотношения измерен в и мощность Р — в Вт. При этом Если подставить сюда в качестве Р мощность, измеренную в киловаттах, то число будет в 1000 раз меньше. Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Перегрузочная способность
l = 2,1 представляет собой отношение максимального вращающего момента к номинальному вращающему моменту Номинальному вращающему моменту соответствует и номинальное скольжение подставлена ближайшая большая (по отношению к ) синхронная скорость вращения магнитного потока статора.Зависимость между вращающим моментом и скольжением ротора s в асинхронном двигателе выражается формулой означает критическое скольжение, а и s соответствуют одному и тому же режиму работы. Если в левую часть подставить , то в качестве s следует подставить . Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Подставив в формулу, выражающую зависимость между вращающим моментом
и скольжением ротора s, численные значения , получим требуемую зависимость
Смотри полное содержание по представленным решенным задачам на websor.
Как определить число пар полюсов асинхронного двигателя?
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
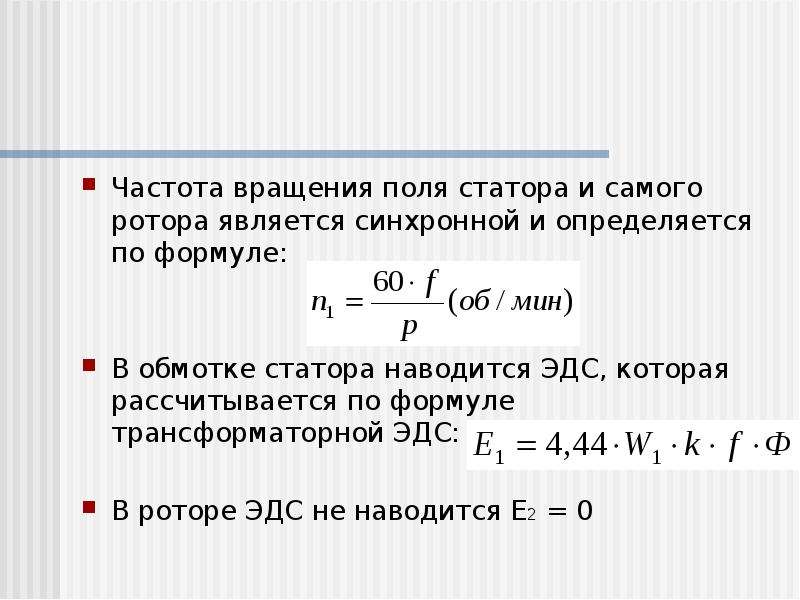
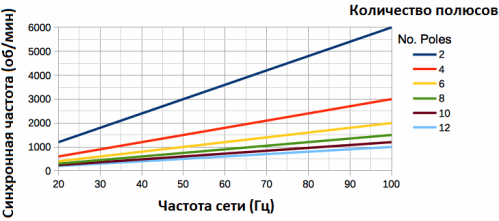
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор.
По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
FAQ по электродвигателям
Какие электродвигатели применяются чаще всего? Какие способы управления электродвигателями используются? Как прозвонить электродвигатель и определить его сопротивление? Как определить мощность электродвигателя? Как увеличить или уменьшить обороты электродвигателя? Как рассчитать ток и мощность электродвигателя? Как увеличить мощность электродвигателя? Каковы потери мощности при подключении трехфазного двигателя к однофазной сети? Какие исполнения двигателей бывают? Зачем электродвигателю тормоз? Как двигатель обозначается на электрических схемах? Почему греется электродвигатель? Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера.
Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению.
Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности.
Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала.
Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
- Р = I (1,73·U·cosφ·η)
- где: Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике), I – ток двигателя, А, U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
- cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).

- Для расчета тока по известной мощности пользуются обратной формулой:
- I = P/(1,73·U·cosφ·η)
- Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
- 13. Типичные неисправности электродвигателей
- Выделяют два вида неисправностей электродвигателей: электрические и механические.
- К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы: Выбор электродвигателя Использование тормозных резисторов с преобразователями частоты
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования.
Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора.
Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения.
Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе.
Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель.
При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ.
totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD).
При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы.
Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В.
Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять.
Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости.
По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ.
CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах.
Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха.
Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель.
Производительность такого устройства не связана с системой управления электропривода.
В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего моментаПри выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели.
Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно.
Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
| Число полюсов, N | Скорость, об/мин | Крутящий момент, л. с. / фут-фунт |
| 2 | 3600 | 1,46 |
| 4 | 1800 | 2,92 |
| 6 | 1200 | 4,38 |
| 8 | 900 | 5,84 |
| 10 | 720 | 7,29 |
| 12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Как определить мощность и обороты электродвигателя без бирки?
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
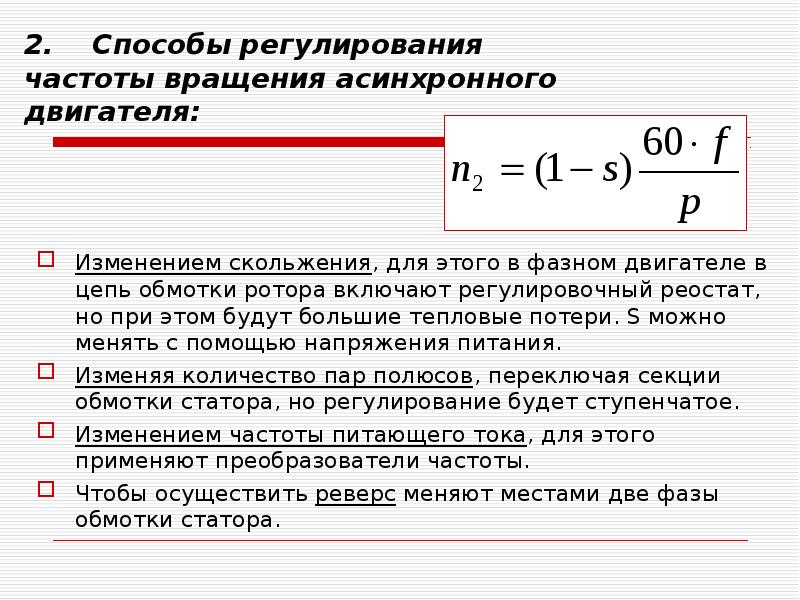
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Номинальные частоты вращения электрических машин
1. Номинальные частоты вращения генераторов и двигателей постоянного тока должны соответствовать указанным в табл.1
Таблица 1 Номинальные частоты вращения машин постоянного тока
Номинальная частота вращения, об/мин | Генераторы | Двигатели |
25 | — | X |
Примечания:
1. Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения приводного двигателя.
2. Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
3. Допускается применение номинальных частот вращения, отличных от указанных в таблице, для двигателей, предназначенных для привода шахтного подъема и механизмов металлургического производства, для генераторов с Непосредственным приводом от авиационных и автомобильных двигателей.
4. Номинальные частоты вращения двигателей, предназначенных для работы в электроприводе механизмов металлургических агрегатов и на подъемнотранспортных механизмах, должны соответствовать ГОСТ 184-61, малогабаритных автотракторных электродвигателей — ГОСТ 9443-67.
2. Номинальные частоты вращения электрических машин переменного тока (до 15 000 об/мин) при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне от 50 до 1000 Гц, должны соответствовать: для синхронных двигателей и генераторов — указанным в табл. 2, для асинхронных трехфазных, двухфазных и однофазных двигателей — указанным в табл. 3.
3. Номинальные частоты вращения электрических машин переменного тока при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне до 25 Гц, должны соответствовать синхронным частотам вращения, получающимся в результате исполнения электрических машин с числом полюсов:
- 2 и 4 для синхронных генераторов и двигателей;
- 2, 4, 6 и 8 для асинхронных двигателей (трех-, двух- и однофазных).
4. Применение номинальных частот вращения, отличных от указанных в пп. 2 и 3, допускается:
- для электрических машин переменного тока на частоты, отличающиеся от стандартных в технически обоснованных случаях;
- для генераторов переменного тока с непосредственным приводом от авиационных двигателей;
- для двигателей магнитной записи и аппаратуры связи, применяемых в системах автономной синхронизации.
Таблица 2 Номинальные частоты вращения синхронных машин
Номинальная частота вращения, об/мин | Синхронные двигатели (Д) и генераторы (Г) частоты, Гц | |||||||||
50 | 100 | 200 | 400 | 1000 | ||||||
Д | Г | Д | Г | Д | Г | Д | Г | Д | Г | |
100 | X | — | — | — | — | — | — | — | — | — |
Примечания: | ||||||||||
Таблица 3 Номинальные частоты вращения асинхронных электродвигателей
Номинальная частота вращения (синхронная), об/мин | Асинхронные двигатели частоты, Гц | ||||
50 | 100 | 200 | 400 | 1000 | |
100 | (X) | — | — | — | — |
Примечания: | |||||
5. Номинальное скольжение асинхронных трехфазных электродвигателей с нормальным, скольжением должно быть (в процентах синхронной скорости вращения) не более:
При мощности двигателя от 0,1 до 0,6 кВт ………..10
То же свыше 0,6 до 2,2 кВт ………………………….. 7
То же свыше 2,2 до 10 кВт …………………………… 5,5
То же свыше 10 кВт ……………………………………. 3,5
Номинальное скольжение асинхронных трехфазных двигателей мощностью до 0,1 кВт, асинхронных двухфазных, однофазных и двигателей с повышенным скольжением стандартом не устанавливается.
6. Номинальные частоты вращения универсальных коллекторных двигателей должны быть следующие: 2700; 5000; 6000; 8000; 12 000; 14 000 об/мин.
7. Допускаемые отклонения от номинальной частоты вращения могут составлять 0,001-5% номинальной частоты вращения и регламентируются ГОСТ 10683-63 для конкретных видов электрических машин и в зависимости от частоты тока.
8. Номинальные частоты вращения электрических машин специального исполнения (электродвигателей для привода гребных винтов; возбудителей; шаговых; импульсных; тяговых и др.; электрогенераторов автотракторных; для взрывных работ и др.) должны соответствовать стандартам или техническим условиям на эти машины и могут отличаться от указанных в данном параграфе.
17 часто задаваемых вопросов о преобразователе частоты и электродвигателе — Статьи
Дата публикации: 21.08.2019
В данной статье мы подобрали для вас ответы на наиболее часто задаваемые вопросы по работе электродвигателей и частотных преобразователей.
1. Что такое электромеханический привод?
Ответ: Электромеханический привод – это система, состоящая из электродвигателя, механического передаточного устройства, электрического силового преобразователя и электронного устройства управления, осуществляющая управляемое преобразование электрической энергии в энергию движения механического объекта.
2. Что такое преобразователь частоты?
Ответ: Преобразователь частоты – это устройство для управляемого питания электродвигателя.
3. В чем заключается назначение преобразователя частоты?
Ответ: Назначение преобразователя частоты – это управление моментом/скоростью вращения электродвигателя за счет изменения частоты и напряжения питания.
4. Что такое ШИМ?
Ответ: ШИМ (Широтно импульсная модуляция) – это метод получения регулируемого выходного напряжения путем изменения длительности коммутации.
5. Как согласуется выходное напряжение ПЧ с входным?
Ответ: Выходное напряжение может меняться от 0 до уровня входного напряжения ПЧ (возможна перегрузка в несколько процентов). Соответственно при питании ПЧ от сети 220В не возможно развить номинальный момент на двигателе подключенным по схеме питания 380В.
6. Как согласуется выходная частота ПЧ с номинальной входной?
Ответ: Выходная частота формируется посредством ШИМ и может меняться в диапазоне от 0 до 400 -590 Гц (в зависимости от модели ПЧ). В зависимости от выходной частоты ПЧ меняется скорость вращения вала двигателя.
7. Возможно ли управлять ПЧ однофазными двигателями?
Ответ: Нет.
8. Возможно ли управлять ПЧ с однофазным питанием, трехфазными двигателями?
Ответ: Да, до 2,2 кВт.
9. Основные плюсы использования преобразователей частоты?
Ответ: Их 2. Во-первых, экономия электроэнергии при работе электродвигателя. Во-вторых, реализация сложных технологических процессов за счет изменения частоты вращения приводов.
10. Какой принцип работы асинхронного двигателя с короткозамкнутым ротором?
Ответ: ПЧ создает вращающееся магнитное поле в статоре, а оно создает электрическое поле в короткозамкнутом роторе (принцип магнитной индукции). Происходит взаимодействие между полями ротора и статора. Поле ротора стремится вращаться также как поле статора, тем самым ротор приходит во вращение.
11. От чего зависит номинальная скорость вращения ротора асинхронного двигателя с короткозамкнутым ротором?
Ответ: Она зависит от частоты питающего напряжения и количества пар полюсов и скольжения. Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
12. Какое значение имеет скорость вращения вала электродвигателя при его работе от сети?
Ответ: Скорость равна номинальной частоте двигателя.
13. Какова скорость вращения вала электродвигателя при его работе от ПЧ?
Ответ: Скорость регулируется от ПЧ .
14. Как связан момент с током электродвигателя?
Ответ: Для двигателя с постоянными магнитами момент пропорционален току статора. Для асинхронных двигателей зависимость между током и моментом нелинейная, но в рабочей зоне рост тока приводит к росту момента.
15: Какие существуют способы подключения обмоток двигателя?
Ответ: Треугольник, Звезда (изменяется номинальное напряжение и ток двигателя).
16: При подключении в звезду или треугольник будет больше номинальное линейное напряжение двигателя?
Ответ: Линейное напряжение будет больше для звезды (соответственно ток наоборот меньше).
17: Что такое скольжение?
Ответ: Скольжение – это разница между скоростью поля статора и частотой вращения ротора в процентах.
Смотрите так же:
Функция «Спящий режим» преобразователя частоты Danfoss FC-051 (Реализация на встроенном контроллере)
Управление частотным преобразователем Danfoss серии FC51 с панели оператора Weintek MT8121XE1WK
Для заказа преобразователя частоты перейдите в каталог по ссылке — VLT Micro Drive
Формула расчета частоты вращений
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:Теория и расчет преобразователей, устройство плавного пуска расчет
Данный раздел посвящен теоретическим основам частотного регулирования и принципам работы устройства плавного пуска.
Принцип работы преобразователя частоты
Частотный преобразователь — устройство, позволяющее осуществлять регулирование скорости вращения электродвигателей посредством изменения частоты электрического тока.
Для понимания процесса частотного регулирования для начала необходимо вспомнить из курса электротехники принцип работы асинхронного электродвигателя.
Вращение вала электродвигателя происходит за счет магнитного поля создаваемого обмотками статора. Синхронная частота вращения магнитного поля зависит от частоты напряжения питающей сети f и выражается следующей зависимостью:
где p – число пар полюсов магнитного поля.
Под действием нагрузки частота вращения ротора электродвигателя несколько отличается от частоты вращения магнитного моля статора вследствие скольжения s:
Следовательно частота вращения ротора электродвигателя представляет собой зависимость от частоты напряжения питающей сети:
Таким образом требуемую частоту вращения вала электродвигателя np можно получить путем изменения частоты напряжения сети f. Скольжение при изменении частоты вращения не увеличивается, а соответственно потери мощности в процессе регулирования незначительны.
Для эффективной работы электропривода и обеспечения максимальных значений основных характеристик электродвигателя требуется вместе с частотой изменять и питающее напряжение.
Функция изменения напряжения в свою очередь зависит от характера момента нагрузки. При постоянном моменте нагрузки Mc = const напряжение на статоре должно регулироваться пропорционально частоте:
Для случаев вентиляторного режима:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, плавное регулирование частоты обеспечивается одновременным регулированием частоты и напряжения на статоре асинхронного двигателя.
Рис 1. Схема частотного преобразователя
На рис. 1. представлена типовая блок-схема низковольтного преобразователя частоты. В нижней части рисунка для каждого блока наглядно изображены графики входных и выходных напряжений и токов.
Сначала напряжение сети (UBX) поступает на вход выпрямителя (1). Далее для сглаживание выпрямленного напряжения (UВЫПР) применяется конденсаторный фильтр (2). Затем уже постоянное напряжение (Ud) подается на вход инвертора (3), где происходит преобразование тока из постоянного обратно в переменный, формируя тем самым выходной сигнал с необходимыми значениями напряжения и частоты. Для получение сигнала синусоидальной формы применяются сглаживающий фильтр (4)
Для более наглядного понимания принципа работы инвертора рассмотрим принципиальную схему частотного преобразователя на рис. 2
Рис. 2 – принципиальная схема низковольтного преобразователя частоты
В основном в инверторах применяется метод широтно-импульсной модуляции (ШИМ). Принцип данного метода заключается в попеременном включении и выключении ключей генератора, формируя импульсы различной длительности (рис. 3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.
Рис. 3. Выходной сигнал преобразователя частоты
Таким образом, управляя процессом включения-выключения инверторных ключей, мы можем формировать выходной сигнал нужной частоты, а следовательно управлять технологическими параметрами механизма путем изменения частоты вращения привода.
Теория и принцип работы устройства плавного пуска
В связи с особенностями переходных процессов происходящих во время пуска электродвигателя токи обмоток достигают 6-8 кратной величины номинального тока электродвигателя, а вращающий момент на его валу достигает 150-200% от номинального значения. Как следствие это увеличивает риск поломки механической части двигателя, а также приводит к падению напряжения питающей сети.
Для решение данных проблем на практике применяется устройства плавного пуска электродвигателей, обеспечивающие постепенное увеличение токовой нагрузки.
Помимо снижения токовых нагрузок мягкие пускатели позволяют: .
- Снизить нагрев обмоток двигателя;
- Снизить просадки напряжения во время пуска;
- Обеспечить торможение и последующий запуск двигателя в установленный момент времени;
- Снизить гидроудары в напорных трубопроводах при работе в составе привода насоса;
- Снизить электромагнитные помехи;
- Обеспечить комплексную защиту электродвигателя при пропадании фазы, перенапряжении, заклинивании и пр;
- Повысить надежность и долговечность системы в целом.
Принцип работы УПП
Типовая схема устройства плавного пуска представлена на рис. 1
Рис. 1. Типовая схема устройства плавного пуска
Изменением угла открытия тиристоров осуществляется регулирования выходного напряжения УПП. Чем больше угол открытия тиристора — тем больше величина выходного напряжения, питающего электродвигатель.
Рис. 2. Формирование выходного напряжения УПП
Принимая во внимание то что величина крутящего момента асинхронного электродвигателя пропорциональна квадрату напряжения, то снижение напряжения снижает величину вращающего момента вала двигателя. При помощи такого метода пусковые токи электродвигателя снижаются до величины 2…4 IНОМ, при этом время разгона несколько увеличивается. Наглядное изменение механической характеристики асинхронного электродвигателя при понижении напряжении показано на рис. 3
Рис 3. Механические характеристика двигателя
Снижение токовой нагрузки в процессе мягкого пуска электродвигателя наглядно показаны на рис. 4.
Рис. 4. Диаграмма плавного пуска асинхронного электродвигателя показана
На рис. 1. продемонстрирована типовая схема устройства плавного пуска однако стоит отметить, что реальная схема мягкого пускателя будет завесить в первую очередь от условий его эксплуатации. Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
В зависимости от этих параметров выделяют следующие режимы работы устройств плавного пуска:
- Нормальный: пуск 10-20 секунд, ток при пуске не более 3,5 Iном.
- Тяжелый: пуск порядка 30 секунд, тока при пуске не превышает 4,5 Iном
- Сверхтяжелый: время разгона не ограничено, системы с большое инерцией, пусковой ток в диапазоне 5,5…8 Iном
Устройства плавного пуска можно разделить на следующие основные группы:
1. Регуляторы пускового момента
Данный тип устройств осуществляет контроль только одной фазы трехфазного двигателя. Контроль одной фазой дает возможность снижать пускового момент электродвигателя двигателя, но при этом снижение пускового тока происходит незначительное. Устройства данного типа не могут применяться для уменьшения токовых нагрузок в период пуска, а также для пуска высокоинерционных нагрузок. Однако они нашли применение в системах с однофазными асинхронными электродвигателями.
2. Регуляторы напряжения без обратной связи
Данный тип устройств работает по следующему принципу: пользователь задает величину начального напряжения и время его нарастания до номинальной величины и наоборот. Регуляторы напряжения без обратной связи могут осуществлять контроль как двух так и трех фаз электродвигателя. Такие регуляторы обеспечивают снижение пускового тока снижением напряжения в процессе пуска.
3. Регуляторы напряжения с обратной связью
Данный тип УПП представляет собой более совершенную модель описанного выше устройств. Наличие обратной связи по позволяет управлять процессом увеличения напряжения добиваясь оптимального режима пуска электродвигателя. Данные о токовой нагрузке позволяет также организовать комплексную защиту электродвигателя от перегрузки, перекоса фаз и т.п.
4. Регуляторы тока с обратной связью
Регуляторы тока с обратной связью представляют собой наиболее совершенные устройства плавного пуска. Принцип работы основан на прямом регулировании тока а не напряжения. Это позволяет добиться наиболее точное управление пуском электродвигателя, а также облегчает настройку и программирование УПП.
Как рассчитать частоту вращения двигателя
При эксплуатации, мониторинге, ремонте или замене двигателя важно понимать его характеристики. Одним из важнейших показателей является количество оборотов в минуту, или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать частоту вращения двигателя и почему это так важно.
Какая частота вращения двигателя?
об / мин — это измерение, используемое для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, когда вал ротора совершает полный оборот в минуту.Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать об / мин
Расчет оборотов двигателя, а также другие измерения, такие как крутящий момент, напряжение и мощность, важны при выборе двигателя для конкретного применения. Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и помочь вам принять более правильные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить цену
Скорость асинхронного двигателя переменного тока
Двигатели переменного токапредназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но может быть и больше. Взаимосвязь между полюсами и частотой вращения двигателя связана с магнитным полем, создаваемым в полюсах статора.Это поле приводит к созданию магнитных полей в роторе, которые зависят от частоты поля в статоре.
Также необходимо учитывать скольжение, которое представляет собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается его «догнать», что и создает крутящий момент, необходимый для запуска двигателя.
Для регулировки скорости трехфазного двигателя переменного тока вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления.Многие элементы управления переменного тока также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если трехфазное питание отсутствует. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорость двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но они не влияют на скорость, как в двигателях переменного тока. Несколько других факторов влияют на скорость в двигателях постоянного тока, включая рабочее напряжение двигателя, силу магнитов и количество витков проволоки, которые имеет якорь.Двигатели постоянного тока могут работать только на скоростях, рассчитанных на доступное им напряжение.
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ вашего двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Ремонт двигателей постоянного и переменного тока
Как рассчитать число оборотов двигателя
Для расчета числа оборотов асинхронного двигателя переменного тока необходимо умножить частоту в герцах (Гц) на 60 — количество секунд в минуте — на два для отрицательного и положительного импульсов в цикле.Затем делите на количество полюсов двигателя:
.- (Гц x 60 x 2) / количество полюсов = об / мин без нагрузки
Вы также можете рассчитать коэффициент скольжения, вычтя номинальную скорость при полной нагрузке из синхронной скорости, разделив полученный ответ на синхронную скорость и умножив полученный ответ на 100:
- ((номинальная синхронная скорость при полной нагрузке) / (синхронная скорость)) x 100 = номинальное скольжение
Затем, чтобы найти число оборотов в минуту при полной нагрузке, вы конвертируете номинальное скольжение в число оборотов в минуту, а затем вычитаете его из числа оборотов холостого хода:
- Чтобы преобразовать номинальное скольжение в об / мин: об / мин x рейтинг скольжения = скольжение
- Для расчета частоты вращения при полной нагрузке: об / мин — скольжение об / мин = частота вращения при полной нагрузке
Число оборотов двигателя постоянного тока зависит от напряжения, подаваемого на двигатель.Обычно производитель двигателя сообщает вам ожидаемую скорость вращения при различных напряжениях. Затем для достижения желаемой скорости вращения вы можете отрегулировать напряжение в соответствии с инструкциями.
Примеры расчета оборотов двигателя
Давайте рассмотрим несколько примеров. Для двигателя переменного тока количество полюсов и частота определяют обороты холостого хода. Для системы 60 Гц с четырьмя полюсами расчеты для определения числа оборотов будут:
- (Гц x 60 x 2) / количество полюсов = об / мин без нагрузки
- (60 х 60 х 2) / 4
- 7200/4 = 1800 об / мин
Величина скольжения незначительно меняется в зависимости от конструкции двигателя.Приемлемая скорость при полной нагрузке для четырехполюсного двигателя 60 Гц составляет 1725 об / мин. Скольжение — это разница между скоростью холостого хода и скоростью полной нагрузки. В данном случае это будет:
- Об / мин при полной нагрузке — об / мин без нагрузки = скольжение об / мин
- 1800-1725 = 75 об / мин
При 60 Гц двухполюсный двигатель работает со скоростью 3600 об / мин без нагрузки и около 3450 об / мин с нагрузкой:
- (Гц x 60 x 2) / количество полюсов = об / мин без нагрузки
- (60 х 60 х 2) / 4
- 7200/2 = 3600 об / мин
При 60 Гц шестиполюсный двигатель будет работать со скоростью 1200 об / мин без нагрузки и со скоростью примерно 1175 об / мин под нагрузкой.Двигатель с восемью полюсами будет работать со скоростью 900 об / мин без нагрузки и около 800 об / мин под нагрузкой. 12-полюсные двигатели, которые встречаются даже реже, чем шестиполюсные и восьмиполюсные модели, работают со скоростью 600 об / мин без нагрузки, а 16-полюсные двигатели работают со скоростью 450 об / мин.
Ремонт двигателей от Global Electronic Services
Важно понимать технические характеристики вашего оборудования, чтобы вы могли лучше его эксплуатировать и обслуживать. Скорость вашего двигателя является неотъемлемой частью его производительности, и возможность рассчитывать и контролировать число оборотов в минуту поможет вам получить максимальную отдачу от ваших машин.
Профессиональные услуги по ремонту и техническому обслуживанию также могут сыграть важную роль в том, чтобы помочь вам в полной мере использовать возможности вашего оборудования. В Global Electronic Services мы имеем обширный опыт ремонта и обслуживания широкого спектра промышленного оборудования, включая двигатели переменного и постоянного тока, серводвигатели, промышленную электронику, гидравлику и пневматику и многое другое. Чтобы узнать больше о ремонте двигателей переменного или постоянного тока или наших услугах, свяжитесь с нами сегодня.
Запросить цену
Измерение и анализ мощности электродвигателя
Билл Гэтеридж, менеджер по продукции, Power Measuring Instruments, Yokogawa Corporation of America
Часть 1: Основные измерения электрической мощности
Электродвигатели — это электромеханические машины, преобразующие электрическую энергию в механическую.Несмотря на различия в размере и типе, все электродвигатели работают примерно одинаково: электрический ток, протекающий через катушку с проволокой в магнитном поле, создает силу, которая вращает катушку, создавая крутящий момент.
Понимание выработки электроэнергии, потерь мощности и различных типов измеряемой мощности может быть пугающим, поэтому давайте начнем с обзора основных измерений электрической и механической мощности.
Что такое мощность? В самом простом виде мощность — это работа, выполняемая в течение определенного периода времени.В двигателе мощность передается на нагрузку путем преобразования электрической энергии в соответствии со следующими законами науки.
В электрических системах напряжение — это сила, необходимая для перемещения электронов. Ток — это скорость потока заряда в секунду через материал, к которому приложено определенное напряжение. Умножив напряжение на соответствующий ток, можно определить мощность.
P = V * I, где мощность (P) в ваттах, напряжение (V) в вольтах, а ток (I) в амперах
Ватт (Вт) — единица мощности, определяемая как один джоуль в секунду.Для источника постоянного тока вычисление представляет собой просто умножение напряжения на ток: W = V x A. Однако определение мощности в ваттах для источника переменного тока должно включать коэффициент мощности (PF), поэтому W = V x A x PF для переменного тока. системы.
Коэффициент мощности представляет собой безразмерное отношение в диапазоне от -1 до 1 и представляет собой количество реальной мощности, выполняемой при работе с нагрузкой. При коэффициенте мощности меньше единицы, что почти всегда имеет место, будут потери в реальной мощности. Это связано с тем, что напряжение и ток цепи переменного тока имеют синусоидальную природу, а амплитуда тока и напряжения цепи переменного тока постоянно смещается и обычно не идеально совмещена.
Поскольку мощность равна напряжению, умноженному на ток (P = V * I), мощность является максимальной, когда напряжение и ток выстраиваются вместе, так что пики и нулевые точки на сигналах напряжения и тока возникают одновременно. Это типично для простой резистивной нагрузки. В этой ситуации две формы сигналов находятся «в фазе» друг с другом, а коэффициент мощности будет равен 1. Это редкий случай, поскольку почти все нагрузки не просто обладают идеальным сопротивлением.
Говорят, что два сигнала «не в фазе» или «сдвинуты по фазе», если два сигнала не коррелируют от точки к точке.Это может быть вызвано индуктивными или нелинейными нагрузками. В этой ситуации коэффициент мощности будет меньше 1, и реальная мощность будет меньше.
Из-за возможных колебаний тока и напряжения в цепях переменного тока мощность измеряется несколькими различными способами.
Реальная или истинная мощность — это фактическая мощность, используемая в цепи, и измеряется в ваттах. В цифровых анализаторах мощности используются методы оцифровки сигналов входящего напряжения и тока для расчета истинной мощности в соответствии с методом, показанным на Рисунке 1.
В этом примере мгновенное напряжение умножается на мгновенный ток (I), а затем интегрируется за определенный период времени (t). Истинный расчет мощности будет работать с любым типом сигнала независимо от коэффициента мощности (рисунок 2).
Гармоники создают дополнительную сложность. Несмотря на то, что электрическая сеть номинально работает на частоте 60 Гц, существует много других частот или гармоник, которые потенциально могут существовать в цепи, а также может присутствовать составляющая постоянного или постоянного тока.Общая мощность рассчитывается путем рассмотрения и суммирования всего содержимого, включая гармоники.
Методы расчета, показанные на Рисунке 2, используются для обеспечения истинного измерения мощности и истинных измерений среднеквадратичного значения для любого типа сигнала, включая все гармонические составляющие, вплоть до полосы пропускания прибора.
Измерение мощности
Далее мы посмотрим, как на самом деле измерить мощность в данной цепи. Ваттметр — это прибор, который использует напряжение и ток для определения мощности в ваттах.Теория Блонделя утверждает, что общая мощность измеряется минимум на один ваттметр меньше, чем количество проводов. Например, однофазная двухпроводная схема будет использовать один ваттметр с одним измерением напряжения и одним измерением тока.
Однофазная трехпроводная двухфазная система часто встречается в проводке общего корпуса. Эти системы требуют двух ваттметров для измерения мощности.
В большинстве промышленных двигателей используются трехфазные трехпроводные схемы, которые измеряются двумя ваттметрами.Таким же образом потребуются три ваттметра для трехфазной четырехпроводной схемы, при этом четвертый провод является нейтралью.
На рисунке 3 показана трехфазная трехпроводная система с нагрузкой, подключенной с использованием метода измерения двух ваттметров. Измеряются два линейных напряжения и два связанных фазных тока (с помощью ваттметров Wa и Wc). Четыре измерения (линейный и фазный ток и напряжение) используются для достижения общего измерения.
Поскольку этот метод требует контроля только двух токов и двух напряжений вместо трех, установка и конфигурация проводки упрощаются.Он также может точно измерять мощность в сбалансированной или несбалансированной системе. Его гибкость и низкая стоимость установки делают его подходящим для производственных испытаний, когда требуется измерение только мощности или нескольких других параметров.
Для инженерных и научно-исследовательских работ лучше всего подходит трехфазный трехпроводной метод с тремя ваттметрами, поскольку он предоставляет дополнительную информацию, которая может использоваться для балансировки нагрузки и определения истинного коэффициента мощности. В этом методе используются все три напряжения и все три тока.Измеряются все три напряжения (от a до b, от b до c, от c до a), и контролируются все три тока.
Рис. 4. При проектировании двигателей и приводов ключевым моментом является просмотр всех трех значений напряжения и тока, что делает метод трех ваттметров на рисунке выше лучшим выбором.
Измерение коэффициента мощности
При определении коэффициента мощности для синусоидальных волн коэффициент мощности равен косинусу угла между напряжением и током (Cos Ø). Это определяется как коэффициент мощности «смещения» и подходит только для синусоидальных волн.Для всех других форм сигналов (несинусоидальных волн) коэффициент мощности определяется как активная мощность в ваттах, деленная на полную мощность в напряжении-амперах. Это называется «истинным» коэффициентом мощности и может использоваться для всех форм сигналов, как синусоидальных, так и несинусоидальных.
Однако, если нагрузка несимметрична (фазные токи разные), это может привести к ошибке при вычислении коэффициента мощности, поскольку в расчете используются только два измерения ВА. Два VA усредняются, потому что предполагается, что они равны; однако, если это не так, будет получен ошибочный результат.
Следовательно, лучше всего использовать метод трех ваттметров для несимметричных нагрузок, поскольку он обеспечит правильный расчет коэффициента мощности как для сбалансированных, так и для несбалансированных нагрузок.
Анализаторы мощностиот Yokogawa и некоторых других компаний используют описанный выше метод, который называется методом подключения 3V-3A (три напряжения и три тока). Это лучший метод для инженерных и проектных работ, поскольку он обеспечивает правильные измерения общего коэффициента мощности и ВА для симметричной или несимметричной трехпроводной системы.
Основные измерения механической мощности
В электродвигателе механическая мощность определяется как скорость, умноженная на крутящий момент. Механическая мощность обычно определяется как киловатты (кВт) или лошадиные силы (л.с.), причем один ватт равен одному джоулю в секунду или одному ньютон-метру в секунду.
Лошадиная сила — это работа, выполняемая за единицу времени. Один л.с. равен 33 000 фунт-футов в минуту. Преобразование л.с. в ватты достигается с использованием этого соотношения: 1 л.с. = 745,69987 Вт.Однако преобразование часто упрощается за счет использования 746 Вт на л.с. (Рисунок 9).
Для асинхронных двигателей переменного тока фактическая скорость вращения ротора — это скорость вращения вала (ротора), обычно измеряемая с помощью тахометра. Синхронная скорость — это скорость вращения магнитного поля статора, рассчитанная как 120-кратная частота сети, деленная на количество полюсов в двигателе. Синхронная скорость — это теоретическая максимальная скорость двигателя, но ротор всегда будет вращаться немного медленнее, чем синхронная скорость из-за потерь, и эта разница скоростей определяется как скольжение.
Скольжение — это разница в скорости ротора и синхронной скорости. Для определения процента скольжения используется простой процентный расчет синхронной скорости минус скорость ротора, деленная на синхронную скорость.
КПД можно выразить в простейшей форме как отношение выходной мощности к общей входной мощности или КПД = выходная мощность / входная мощность. Для двигателя с электрическим приводом выходная мощность является механической, в то время как входная мощность является электрической, поэтому уравнение эффективности выглядит следующим образом: КПД = механическая мощность / входная электрическая мощность.
Часть 2: Выбор приборов для измерения и анализа мощности электродвигателя
Различные ассоциации разработали стандарты тестирования, которые определяют точность приборов, необходимых для соответствия их стандарту: IEEE 112 2004, NVLAP 160 и CSA C390. Все три включают стандарты для измерения входной мощности, напряжения и тока, датчиков крутящего момента, скорости двигателя и т. Д. Трансформаторы тока (CT) и трансформаторы напряжения (PT) являются одними из основных контрольно-измерительных приборов, используемых для выполнения этих измерений.
Соответствующие стандарты очень похожи, за некоторыми исключениями. Допустимые инструментальные ошибки для стандартов IEEE 112 2004 и NVLAP 150 идентичны; однако CSA C390 2006 имеет некоторые отличия в отношении температуры и показаний.
Например, требования к входной мощности для CSA C390 2006 составляют ± 0,5% от показания и должны включать ошибки CT и PT, тогда как для IEEE 112 2004 и NVLAP 150 требуется только ± 0,5% от полной шкалы.
Датчики тока
Датчики тока обычно требуются для тестирования, потому что сильный ток не может быть подан непосредственно в измерительное оборудование.Существует множество датчиков, подходящих для конкретных приложений. Накладные датчики могут использоваться с анализаторами мощности. Также можно использовать щупы для осциллографа, но при их использовании следует соблюдать осторожность, чтобы убедиться, что прибор не подвергается воздействию высоких токов.
Для трансформаторов тока подводящий провод может быть подключен через окно (трансформаторы тока обычно имеют форму пончика или продолговатую, с отверстием или внутренней частью, называемыми окном), или слаботочные соединения могут быть выполнены с клеммами в верхней части устройство.Шунты обычно используются для приложений постоянного тока, но не переменного тока или искаженных частот, хотя их можно использовать для синхронных двигателей с частотой до нескольких сотен Гц. Доступны специализированные трансформаторы тока, которые хорошо работают на высоких частотах, которые чаще встречаются в осветительных приборах, а не в двигателях и приводах.
Yokogawa вместе с LEM Instruments разработали уникальную систему трансформаторов тока, которая обеспечивает высокую точность в диапазоне от постоянного тока до кГц. Это трансформатор активного типа, использующий блок кондиционирования источника питания и обеспечивающий точность около 0.05 до 0,02% от показания. Этот тип системы трансформатора тока обеспечивает очень высокую точность измерений, особенно для частотно-регулируемых приводов, которая может изменяться от 0 Гц до рабочей скорости подключенного двигателя.
Трансформаторы напряжения просто преобразуют напряжение с одного уровня на другой. В измерительных приложениях иногда требуются понижающие трансформаторы для снижения напряжения, подаваемого на измерительный прибор, хотя многие приборы могут работать с относительно высокими напряжениями и не требуют понижающего трансформатора.
Измерительные трансформаторы обычно представляют собой комбинацию трансформатора тока и трансформатора напряжения и могут уменьшить количество требуемых преобразователей в некоторых измерительных приложениях.
Рекомендации и меры предосторожности при выборе
При принятии решения, какое устройство использовать, первым вопросом является частотный диапазон измеряемых параметров. Для синусоидальных волн постоянного тока можно использовать шунты постоянного тока, которые обеспечивают высокую точность и простую установку. Для приложений переменного и постоянного тока можно использовать эффект Холла или измерительный трансформатор активного типа.Технология эффекта Холла имеет более низкий уровень точности, в то время как активный тип обеспечивает большую точность. Различные измерительные трансформаторы могут работать на высоких частотах 30 Гц и более, но их нельзя использовать для постоянного тока.
Следующее соображение — требуемый уровень точности. Для измерительного трансформатора это обычно указывается как точность передаточного числа витков. Фазовый сдвиг — еще один важный фактор, и он очень важен, потому что многие трансформаторы предназначены только для измерения тока и не имеют компенсации фазового сдвига.
Фазовый сдвиг в основном зависит от коэффициента мощности для измерения мощности и, таким образом, влияет на расчет мощности. Например, трансформатор тока, который имеет максимальный фазовый сдвиг 2 ° как часть своей спецификации, внесет ошибку косинуса (2 °) или ошибку 0,06%. Пользователь должен решить, приемлем ли этот процент ошибок для приложения.
Источником тока является трансформатор тока. Согласно закону Ома, напряжение (E) равно току через проводник (I), умноженному на сопротивление (R) проводника в омах.Открытие вторичной обмотки трансформатора тока эффективно увеличивает сопротивление до бесконечности. Это означает, что внутренний ток насыщает катушку, напряжение также стремится к бесконечности, и устройство повреждается или разрушается. Что еще хуже, трансформатор тока со случайно разомкнутой вторичной обмоткой может серьезно травмировать рабочих.
Никогда не размыкайте вторичную обмотку трансформатора тока. Пользователи могут получить серьезные травмы, а CT может быть поврежден или разрушен.
Совместимость приборов
Чтобы определить совместимость прибора, необходимо определить выходной уровень ТТ.Клеммные и другие трансформаторы тока обычно имеют выходную мощность, указанную в милливольтах на ампер, миллиампер на ампер или ампер. Типичный выходной ток измерительного ТТ может быть указан в диапазоне от 0 до 5 ампер.
Необходимо учитывать импеданс и нагрузку на ТТ, которые являются факторами, на которые влияет количество проводов, используемых для подключения ТТ к прибору. Эта проводка является сопротивлением или нагрузкой на прибор и, следовательно, может повлиять на измерения.
Пробникипри неправильном использовании могут создавать собственный набор проблем.Многие пробники осциллографа рассчитаны на работу с входным сопротивлением осциллографа, но диапазоны входного сопротивления анализатора мощности могут отличаться, и это необходимо учитывать.
Еще один аспект, который следует учитывать при определении совместимости прибора, — это физические требования к устройству. Размер необходимо учитывать вместе с типом трансформатора тока, например, зажимного или кольцевого типа, каждый из которых будет лучше работать в конкретной ситуации.
Пример системы трехфазного двигателя
Теперь мы рассмотрим типичное трехфазное трехпроводное измерение мощности двигателя с использованием метода двух ваттметров.Теорема Блонделя утверждает, что количество требуемых измерительных элементов на единицу меньше количества токонесущих проводников. Это позволяет измерять мощность в трехфазной трехпроводной системе с использованием двух преобразователей при отсутствии нейтрали. Однако, когда есть нейтраль, используются три преобразователя, поскольку теперь имеется четыре проводника.
Трехфазное питание используется в основном в коммерческих и промышленных средах, особенно для питания двигателей и приводов, поскольку более экономично эксплуатировать большое оборудование с трехфазным питанием.Для расчета трехфазной мощности напряжение каждой фазы умножается на ток каждой фазы, который затем умножается на коэффициент мощности, и это значение умножается на квадратный корень из трех (квадратный корень из 3 равен равно 1,732).
Для измерения трехфазной мощности, потребляемой нагруженным двигателем, подключается анализатор мощности. На рисунке 1 показано типичное соединение с дисплеем, на котором показаны все три напряжения, все три тока, общая мощность и коэффициент мощности.
На рисунке 2 показано трехфазное трехпроводное измерение мощности, выполненное с использованием метода двух ваттметров.Перечислены все три тока и напряжения, а также общие ВА и ВАР. Эта конфигурация может отображать отдельные показания мощности фазы, но их не следует использовать напрямую, потому что для этого метода измерения только полная мощность является точным показанием.
В основном, при использовании метода двух ваттметров в трехпроводной трехфазной системе невозможно измерить мощность отдельной фазы или измерить какие-либо параметры фазы, включая коэффициенты мощности фазы. Однако можно измерить все параметры фазы.
Для трехфазного двигателя с трехпроводным соединением в треугольник можно измерять линейные напряжения и токи отдельных фаз. Поскольку нейтрали нет, измерять фазные напряжения невозможно. Эта ситуация приводит к некоторым показаниям, которые необходимо пояснить.
Глядя на отображение формы сигнала на Рисунке 3, можно увидеть линейные напряжения Vab, Vbc и Vac. Линейные напряжения, наблюдаемые прибором, в сбалансированной системе разнесены на 60 °. Токи — это фазные токи, которые приборы видят под углом 120 °.
Другое представление этой системы изображено на векторной диаграмме Phasor, показанной на рисунке 4. Треугольник в верхней части этого рисунка показывает измерения линейного напряжения черным цветом, значения фазного напряжения — красным (но это теоретические потому что нейтрали нет), а фазные токи синим цветом.
В нижней части рисунка показаны разности фаз между напряжениями и токами. Опять же, обратите внимание, что линейные напряжения разнесены на 60 °, а фазные токи разнесены на 120 °.Еще одна деталь заключается в том, что если бы верхняя диаграмма представляла чисто резистивную нагрузку, то синие токи были бы синхронизированы с красными напряжениями. Однако при индуктивной нагрузке (например, в двигателе) синие векторы тока не совпадают по фазе с напряжениями.
Кроме того, для этого метода измерения на нижней диаграмме векторы тока всегда будут иметь дополнительный сдвиг на 30 ° от напряжений. Суть в том, что правильно настроенный анализатор мощности учтет все эти условия.
Что, если фазовая мощность и фазовый коэффициент мощности должны быть точно измерены в трехфазной трехпроводной системе, а не просто приблизительно? На рисунке 5 показан метод, позволяющий измерять фазовые параметры трехфазного трехпроводного двигателя путем создания плавающей нейтрали.
Однако у этой техники есть ограничения. Он будет хорошо работать на входе асинхронного двигателя, синхронного двигателя или аналогичного двигателя без привода с регулируемой скоростью. Следует соблюдать осторожность при использовании этого метода в системе привода с регулируемой скоростью, поскольку высокочастотные искаженные формы сигналов и гармоники могут привести к несогласованным измерениям.
Более того, метод плавающей нейтрали работает только для оборудования с сигналами синусоидального типа. С помощью привода с широтно-импульсной модуляцией (ШИМ) можно включить линейный фильтр 500 Гц (фильтр нижних частот), который затем позволит отображать показания для основной частоты, но не для общей частоты.
Трехпроводные и четырехпроводные измерения мощности
Важно понимать, что мощность будет считываться одинаково независимо от того, измерена ли она трехфазным трехпроводным или трехфазным четырехпроводным методом.Однако при трехфазном четырехпроводном соединении измеряемые значения напряжения представляют собой фазные напряжения от линии к нейтрали.
Рисунок 6 — снимок экрана анализатора мощности, который показывает, насколько похожи показания мощности и коэффициента мощности для привода с ШИМ, работающего с двигателем, сравнивая трехфазный трехпроводной вход с фильтром 500 Гц с трехфазным четырехпроводным. вход с плавающей нейтралью.
В альтернативном решении используется функция измерения дельты, которая есть в анализаторах мощности Yokogawa.Функция измерения дельты использует мгновенные измерения линейного напряжения и фазного тока для получения истинного межфазного напряжения, даже если фазы не сбалансированы. Это возможно благодаря вычислению векторной амплитуды внутри процессора. Эта функция также обеспечивает измерения фазной мощности в трехпроводной цепи. Решение для измерения дельты также обеспечивает ток нейтрали.
Часть 3: Измерения электрической мощности для трехфазного двигателя переменного тока
Полное тестирование системы привода и двигателя на основе ШИМ (широтно-импульсной модуляции) представляет собой трехэтапный процесс.Шаг 1 — это точное измерение входной и выходной мощности привода с регулируемой скоростью ШИМ для определения эффективности привода и потерь мощности. Шаг 2 — это точное измерение входной мощности двигателя, а шаг 3 — точное измерение механической мощности двигателя.
Оптимальный метод — объединить все три шага с помощью одного анализатора мощности, чтобы исключить временной сдвиг. Это также обеспечивает отличные расчеты эффективности, все в едином программно-аппаратном решении.
Рисунок 7: Этот снимок экрана анализатора мощности показывает, как функцию измерения дельты можно использовать для получения истинных показаний и мощности фазы, даже если фазы не сбалансированы.
Некоторые анализаторы мощности имеют опцию двигателя, в которой сигналы скорости и момента могут быть интегрированы таким образом. Эти анализаторы мощности могут измерять электрическую мощность и механическую мощность и отправлять данные на ПК с запущенным программным обеспечением от оригинального производителя анализатора или заказным программным обеспечением от системного интегратора.
Измерения привода ШИМ для двигателей переменного тока
При использовании частотно-регулируемого привода с ШИМ для управления двигателем часто бывает необходимо измерить как входной, так и выходной сигнал частотно-регулируемого привода с помощью шестифазного анализатора мощности.Эта установка может не только измерять трехфазную мощность, она также может измерять мощность постоянного или однофазного тока. См. Рисунок 1.
В зависимости от анализатора режим настройки будет выполняться в нормальном или среднеквадратичном режиме. Конфигурация проводки должна соответствовать применению, например, трехфазный вход и трехфазный выход.
Любой линейный фильтр или фильтр нижних частот должны быть отключены, поскольку фильтрация затрудняет измерения. Однако фильтр пересечения нуля или частотный фильтр должен быть включен, потому что он будет фильтровать высокочастотный шум, чтобы можно было измерить основную частоту.Это измерение необходимо при отслеживании частоты привода.
На рис. 2 показан сигнал выходного напряжения ШИМ с сильно искаженным напряжением, срезанными высокими частотами и с большим количеством шумов на токовой стороне, что затрудняет измерение. Высокочастотное переключение сигнала напряжения создает сильно искаженную форму волны с высоким содержанием гармоник. Частота варьируется от 0 Гц до рабочей скорости.
Для такого зашумленного сигнала нужны специальные датчики тока для измерения.Для точных измерений мощности с ШИМ также необходимы анализаторы мощности с широкой полосой пропускания, способные измерять эти сложные сигналы.
На рисунке 3 показан пример содержания гармоник напряжения на выходе ШИМ. Присутствуют частоты биений, а содержание гармоник напряжения превышает 500 порядков (примерно 30 кГц). Большая часть гармоник приходится на нижние частоты на токовой стороне.
Проблемы измерения привода двигателя с ШИМ
Напряжение инвертора обычно измеряется одним из двух способов.Можно использовать истинное среднеквадратичное измерение, которое включает полное содержание гармоник. Однако, поскольку основная форма волны — это в первую очередь то, что способствует крутящему моменту двигателя, можно выполнить и использовать более простые измерения. В большинстве приложений требуется только измерение основной формы волны.
Существует два основных метода измерения основной амплитуды волны напряжения. Первый и самый простой — использовать фильтр нижних частот для удаления высоких частот. Если в анализаторе мощности есть этот фильтр, просто включите его.Правильная фильтрация даст среднеквадратичное значение напряжения основной частоты инвертора. Однако этот тип фильтрации не обеспечивает истинного измерения полной мощности, поэтому фильтрация — не самый требовательный метод.
Второй метод — это метод измерения выпрямленного среднего, который выдает среднеквадратичное значение напряжения основной волны без фильтрации с использованием определения среднего значения напряжения, масштабированного до среднеквадратичного напряжения. Алгоритм выпрямленного среднего среднего за цикл обеспечит эквивалент основного напряжения, который будет очень близок к среднеквадратичному значению основной волны.
С помощью этого метода можно измерить полную мощность, общий ток и напряжение основной гармоники.
Измерение амплитуды основной волны с помощью гармонического анализа
Функцию гармонического анализа можно использовать для определения истинного основного напряжения с помощью быстрого преобразования Фурье (БПФ) для определения амплитуды каждой гармонической составляющей, включая основную волну. Это дает точное измерение среднеквадратичного напряжения основной волны. Новейшие анализаторы мощности могут выполнять одновременные измерения истинных среднеквадратичных значений и гармонических составляющих.
На рисунке 4 Urms2 (среднеквадратичное значение на выходе ШИМ) является очень большим числом, а F2 (среднее значение основной гармоники) несколько ниже. Значение Urms3 (фильтрация основного) дает аналогичный результат. Наконец, U2 (1) получается из анализа гармоник или вычислений FFT основной гармоники. F2, Urms3 и U2 (1) дают очень близкие результаты, но расчет U2 (1) FFT считается наиболее точным.
Инверторный ток обычно измеряется только одним способом, и это как истинный среднеквадратичный сигнал, потому что все гармонические токи способствуют повышению температуры в двигателе и ответственны за него, поэтому все они должны быть измерены.
Еще одно важное измерение включает в себя напряжение привода В / Гц (вольт-на-герц). Привод с ШИМ должен поддерживать постоянное соотношение В / Гц по сравнению с рабочей скоростью двигателя. Анализатор мощности может рассчитывать В / Гц, используя среднеквадратичное значение или значение основного напряжения. Определенная пользователем математическая функция анализатора используется для построения уравнения для этого измерения.
Измерение напряжения шины постоянного тока
Напряжение на шине постоянного тока в ШИМ может быть измерено для проверки условий повышенного и пониженного напряжения.Это измерение может быть выполнено внутри привода на клеммах конденсаторной батареи. Однако более простой способ — использовать отображение формы сигнала анализатора мощности с измерением курсора.
При отображении формы сигнала с помощью курсорного измерения необходимо убедиться, что курсор не находится прямо над небольшими выступами на дисплее. Вместо этого курсор должен находиться поперек осциллограммы, чтобы выполнить точное измерение. На рисунке 5 показано измерение напряжения ШИМ с высокоскоростным переключением.Курсор устанавливается для чтения значения, например 302,81 В.
Измерения механической мощности
Механическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя. На рынке существует множество различных типов датчиков скорости и крутящего момента, которые работают с различными двигателями. Хотя анализаторы Yokogawa могут взаимодействовать с большинством датчиков скорости и крутящего момента, все же целесообразно подтверждать совместимость в каждом случае. Эти датчики могут использоваться для предоставления информации о механических измерениях для расчета измерений механической мощности в анализаторе мощности.
Многие датчики поставляются с интерфейсной электроникой для правильной обработки сигнала для работы с анализаторами мощности или другим оборудованием. Условный сигнал может быть аналоговым выходом или выходом последовательной связи, который идет на ПК и его прикладное системное программное обеспечение.
Одним из вариантов измерения механической мощности является использование как датчика, так и соответствующего измерительного прибора от данного производителя. Такой подход имеет преимущества, поскольку датчики будут точно согласованы с прибором.Будут доступны показатели крутящего момента, скорости и мощности, и, вероятно, будут варианты подключения к ПК вместе с соответствующим прикладным программным обеспечением.
Более интегрированный подход изображен на рисунке 6. В этой конфигурации выходные сигналы скорости и крутящего момента от измерительных приборов датчика подключаются непосредственно к входам скорости и крутящего момента анализатора мощности. Это дает большое преимущество, заключающееся в том, что измерения электрической и механической мощности могут оцениваться одновременно, а расчеты эффективности могут выполняться непрерывно.
КПД двигателя, привода и системы
КПД инвертора в простейшей форме рассчитывается как выходная мощность, деленная на входную мощность, и выражается в процентах. Один из методов, используемых для измерения входной и выходной мощности, заключается в простом подключении измерителей мощности на входе и выходе, при этом показания двух измерителей используются для расчета эффективности.
Более комплексным методом является использование анализатора мощности с несколькими входами для одновременного измерения входа и выхода, как показано на рисунке 1.Это приводит к более точному расчету эффективности, поскольку он использует один анализатор мощности для устранения потенциальных ошибок, вызванных измерениями временного сдвига.
С помощью внутренних математических вычислений, предоставляемых анализатором, можно настроить очень простое вычисление через меню для расчета потерь привода и эффективности привода.
Какой метод мне следует использовать?
IEEE 112 — это промышленный стандарт США для тестирования двигателей, в котором описаны несколько методов.На рисунке 7 показан дисплей анализатора мощности, поддерживающий «Метод A» стандарта IEEE 112, в котором вся механическая мощность делится на общую потребляемую мощность двигателя. Стандарт определяет многие параметры, помимо измерений тока и напряжения двигателя, и предоставляет инструкции по проведению общепринятых испытаний многофазных и асинхронных двигателей и генераторов и составлению отчетов по ним. Кроме того, стандарт содержит 11 методов испытаний, чтобы определить, как проводить измерения эффективности двигателей.
Метод испытаний A — ввод-вывод, определенный IEEE 112: КПД рассчитывается как отношение выходной мощности измерения к измеренной входной мощности после корректировки температуры и динамометра, если применимо.Испытания проводятся при номинальной нагрузке с помощью механического тормоза или динамометра. Этот рейтинг должен быть ограничен двигателями с номинальной полной нагрузкой не более 1 кВт.
Метод испытаний B — ввод-вывод с разделением потерь: В методе B выполняются измерения как входной, так и выходной мощности, но различные потери разделяются. Большинство этих потерь просто производят тепло, которое должно рассеиваться двигателем в сборе, и представляют собой энергию, недоступную для выполнения работы. Этот метод является признанным стандартом тестирования U.S. автомобилестроение для двигателей с полной нагрузкой от 1 до 300 кВт.
Хотя оба метода A и B работают, метод B требует большого количества приборов и обычно выполняется только производителями двигателей. Поскольку большинство производителей используют метод B, а большинство пользователей предпочитают метод A, расчеты эффективности между ними могут отличаться. Данные производителей двигателей и приводов могут использовать разные скорости двигателя, испытательные нагрузки или другие условия испытаний.
Заключение
При измерении мощности электродвигателя необходимо учитывать множество факторов, например, полный и истинный коэффициент мощности.Эти измерения включают сложные уравнения, поэтому большинство компаний используют анализаторы мощности для автоматического получения результатов.
После принятия решения об использовании анализатора мощности необходимо принять решение о частотном диапазоне и уровне точности. Совместимость приборов — еще один важный аспект безопасного получения точных показаний, особенно с трансформаторами тока, и это та область, где необходимо учитывать ввод / опции анализатора. При правильных входных сигналах датчиков измерения механической мощности также можно проводить с помощью анализатора мощности.Выбор правильных датчиков скорости и крутящего момента — это первый шаг в определении механической мощности.
Некоторые анализаторы мощности также позволяют выполнять измерения с широтно-импульсной модуляцией. Однако настройка анализатора для измерения ШИМ также требует знания о том, как токи и напряжения будут влиять на измерения мощности.
Прецизионный высокочастотный анализатор мощности — важный инструмент для измерения как механической, так и электрической мощности. Его функции анализа и показания могут помочь улучшить работу и даже продлить срок службы двигателя.Выбор подходящего анализатора и его правильная реализация требуют знаний; однако при правильном использовании данные анализатора мощности предоставят точные и очень ценные данные.
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного токауникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя. Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре.Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью приблизительно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента.Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока. Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительные сведения о скольжении см. В нашем блоге «Синхронные и асинхронные двигатели: обнаружение различий».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется.Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила может быть потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного токаХотя двигатели постоянного тока с постоянными магнитами также имеют полюса, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока. Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов — все это влияет на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на номинальной скорости 12 В.Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант редукторного двигателя. Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
| Формулы и расчеты, приведенные ниже, следует использовать только для целей оценки.Заказчик обязан указать требуемые мощность двигателя, крутящий момент и время разгона для своего приложения. Продавец может пожелать проверить указанные заказчиком значения с помощью формул в этом разделе, однако, если есть серьезные сомнения относительно приложения заказчика или если заказчик требует гарантированной производительности двигателя / приложения, заказчик должен нанять инженера-электрика для точного определения расчеты. Чтобы получить подробное описание каждой формулы, нажмите на ссылки ниже, чтобы перейти прямо к ней. Практические правила (приближение)Механические формулы
Преобразование температуры° C = (° F — 32) x 5/9° F = (° C x 9/5) + 32
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||