
Как определить параметры двигателя без шильдика?
Для замены или ремонта вышедшего из строя электродвигателя необходимо знать его характеристики. К основным параметрам двигателя относятся номинальная мощность, номинальный ток, напряжение питания, скорость вращения, схема подключения. Сведения о некоторых характеристиках содержатся на шильдике — табличке на корпусе двигателя. Однако иногда шильдик отсутствует, и параметры определяются по косвенным признакам.
Мощность и ток
Ориентировочно мощность электродвигателя можно определить по его габаритам и диаметру вала. При одинаковых размерах и большем диаметре вала мощность на валу будет больше, а частота оборотов – меньше.
Если двигатель уже подключен, то примерная мощность определяется по уставкам защитных устройств, через которые он питается (мотор-автомат, тепловое реле). Если привод подключен через преобразователь частоты, мощность будет равна либо меньше мощности ПЧ.
Еще один способ – включить двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого нужно померить токоизмерительными клещами ток двигателя, который должен быть одинаков по всем обмоткам. На основании измеренного тока определяется мощность.
После этого нужно померить токоизмерительными клещами ток двигателя, который должен быть одинаков по всем обмоткам. На основании измеренного тока определяется мощность.
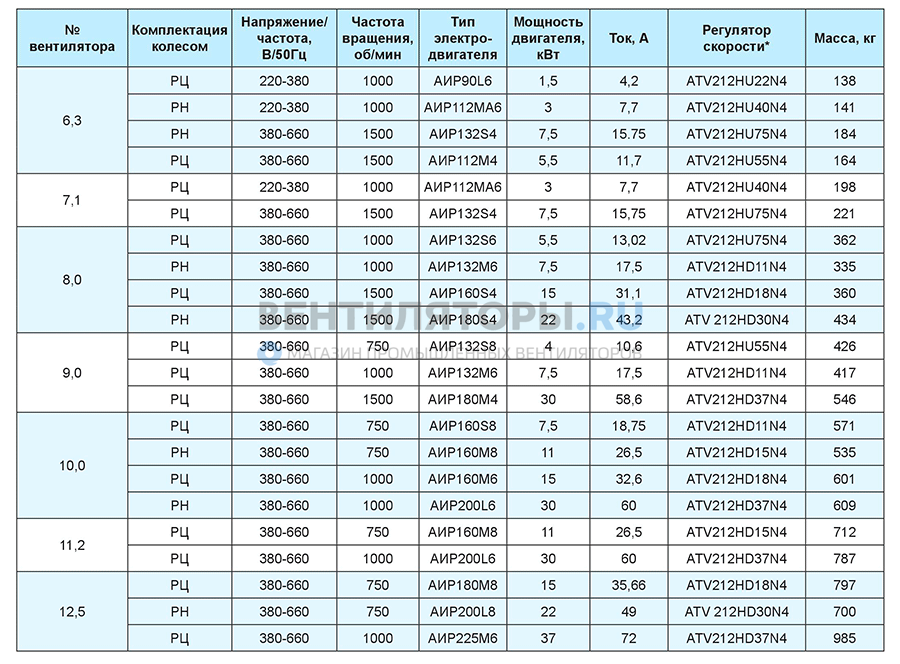
Также приблизительно оценить мощность асинхронного двигателя, подключенного по схеме «звезда», можно, разделив его номинальный измеренный ток на 2. Для двигателей менее 1,5 кВт из-за потерь ток нужно делить на 2,2…2,5, для мощности более 30 кВт этот эмпирический коэффициент будет равен 1,8…1,9.
Если нет шильдика, косвенно мощность можно определить и по сопротивлению обмоток, заодно проверив их целостность. Для этого необходимо измерить сопротивления при помощи омметра и сравнить их с сопротивлением двигателей известных мощностей, либо обратиться к информации от производителей.
Частота вращения
Как было сказано выше, частоту оборотов двигателя можно оценить по диаметру вала. Но есть и другие способы.
Согласно известной формуле, скорость вращения электродвигателя равна 60F/P, где F — частота питающей сети (50 Гц), Р – количество пар полюсов статора.
Полюсы можно посчитать, сняв переднюю или заднюю крышку. В двухполюсном электродвигателе (Р = 1) на каждую фазу приходится одна обмотка, содержащая 2 катушки, итого для трех фаз 6 катушек. Исходя из способа намотки нужно определить конфигурацию катушки, затем установить способ намотки всего статора. При количестве пар полюсов Р = 1 скорость вращения составит 3000 об/мин, при P = 2 – 1500 об/мин и так далее.
Отметим, что реальная скорость вращения двигателя отличается от расчетной за счет механических потерь и скольжения электромагнитного поля. У маломощных двигателей рабочая скорость под нагрузкой может быть ниже расчетной на 10-15 %.
Напряжение питания
Напряжение можно определить по схеме включения. Если двигатель подключен «звездой», его питающее линейное напряжение равно 380 В, а если «треугольником» – 220 В. Тогда в первом случае электродвигатель можно питать от сети напрямую, во втором – от однофазной сети через конденсатор или преобразователь частоты.
В большинстве новых двигателей для определения схемы включения достаточно вскрыть коробку борно. В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В двигателях, подвергшихся перемотке, схему собирают внутри, и из корпуса выводят три провода. В этом случае можно предположить, что напряжение питания равно 380 В и включить двигатель через защитный мотор-автомат. Если рабочее напряжение выше (660 В), двигатель будет вращаться замедленно, с пониженной мощностью. Если ниже (220 В), возникнет перегрузка, и сработает мотор-автомат, либо двигатель начнет перегреваться.
Заключение
Процесс определения параметров двигателя без шильдика часто бывает интуитивным, на основании опыта и последовательных измерений. Также важно при пробных включениях двигателя обеспечивать его защиту и электробезопасность.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Подбор импортного аналога двигателя АИР
Принципы программирования ПЛК
Мастеровым от мастерового.
 : Определение типа асинхронного двигателя
: Определение типа асинхронного двигателя Прежде чем подключить асинхронный двигатель к сети, необходимо определить, какой тип двигателя находится перед нами. Так как каждый из них требует разного подключения.
Среди распространенных двигателей можно выделить три основные группы. Это трёхфазные – они наиболее распространены. Затем идут однофазные, с конденсаторной обмоткой, или просто конденсаторные. И наименее распространены – однофазные с пусковой обмоткой, или как их ещё называют – с бифилярной обмоткой. Касаться двухскоростных и других редких модификаций я в данной статье не буду.
Так как шильдики на двигателях могут быть повреждены, или
вовсе отсутствовать. А иногда двигатель может быть перемотан с пересчётом на
другой тип, то ориентироваться на табличку можно только при условии, что
двигатель новый. В других случаях, лучше определить тип двигателя
самостоятельно.
В других случаях, лучше определить тип двигателя
самостоятельно.
Для того, чтоб определить тип двигателя, нам понадобится омметр способный замерять от единиц сопротивления и выше.
Открываем борно двигателя и убираем все перемычки между проводами, а также, разъединяем все соединения.
Замеряя сопротивление между проводами, находим «прозванивающиеся» пары и записываем сопротивление между ними.
Трёхфазный двигатель имеет три одинаковых обмотки. Поэтому он будет иметь три пары проводов с одинаковым сопротивлением или три провода, сопротивление между которыми будет одинаково в любой последовательности. Различия между этими вариантами в том, что двигатель с тремя выводами уже соединён звездой и мы не сможем соединить его треугольником без разборки и выведения дополнительных проводов. Если же в двигателе шесть выводов, то мы сможем применить любую схему подключения.
Однофазные двигатели обычно имеют две разные обмотки (в
редких случаях две обмотки одинаковы). Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.
Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.
Если сопротивление обмоток отличается не больше чем в 2 раза, то это двигатель, скорее всего, конденсаторный. Если больше чем в 2 раза, то с пусковой обмоткой. Более точно можно определить опытным путём.
P.S. При «прозвонке» проводов, нужно учитывать, что из двигателя могут выходить дополнительные провода от термодатчиков, «корпус» двигателя, центробежные выключатели и др.
Николай Москаленко Сделал дополнение к статье, за что ему большое спасибо.
По принципам устройства однофазные асинхронные двигатели разделяются на следующие основные типы:
1) двигатели с пусковой обмоткой
2) двигатели с встроенным сопротивлением (бифилярная обмотка)
3) конденсаторные двигатели
4) двигатели с короткозамкнутым витком на полюсе
Яркий представитель первого типа находится справа (АД-180). Пусковая обмотка занимает 1/3 пазов статора, имеет малое кол-во витков и, следовательно, малое индуктивное сопротивление.
Пусковая обмотка занимает 1/3 пазов статора, имеет малое кол-во витков и, следовательно, малое индуктивное сопротивление.
К второму типу относятся двигатели АОЛБ -32-2, с бифилярной обмоткой (например, мотается катушка из 75 витков из которых 25 разворачиваются на 180 градусов) — охватывает диапазон от 18 до 600 Вт.
К третьему типу двигателе надо отнести двигатели АОЛГ и АОЛД — конденсаторные и с пусковым конденсатором. они были заменены новой серией АВ (трехфазный) или АВЕ (однофазный, второй справа).
Двигатели и выбор правильного
Введение
В любой момент вы находитесь рядом по крайней мере с одним или двумя типами двигателей. От вибромотора в вашем мобильном телефоне до вентиляторов и CD-привода в вашей любимой игровой системе моторы окружают нас повсюду. Моторы позволяют нашим устройствам взаимодействовать с нами и окружающей средой. При множестве применений двигателей их конструкция и работа могут различаться.
Чему вы научитесь
В этом руководстве мы рассмотрим некоторые из этих основных типов двигателей и их применение:
- Щеточные двигатели постоянного тока
- Бесщеточные двигатели
- Шаговые двигатели
- Линейные двигатели
Рекомендуемая литература
- Что такое электричество
- Что такое цепь?
- Напряжение, ток, сопротивление и закон Ома
Что заставляет двигатель двигаться?
Самый расплывчатый и простой ответ — магнетизм! Хорошо, теперь давайте превратим эту простую силу в суперкар!
Для простоты нам нужно взглянуть на некоторые понятия через призму мысленного эксперимента. Будут допущены некоторые вольности, но если вы хотите углубиться в детали, вы можете проконсультироваться с доктором Гриффитсом. Для нашего мысленного эксперимента мы установим, что магнитное поле создается движущимся электроном 9.0035 т.е. текущий . Хотя это создает классическую модель, которую мы можем использовать, все ломается, когда мы достигаем атомного уровня. Чтобы лучше понять атомный уровень магнетизма, Гриффитс объясняет это в другой книге…
Будут допущены некоторые вольности, но если вы хотите углубиться в детали, вы можете проконсультироваться с доктором Гриффитсом. Для нашего мысленного эксперимента мы установим, что магнитное поле создается движущимся электроном 9.0035 т.е. текущий . Хотя это создает классическую модель, которую мы можем использовать, все ломается, когда мы достигаем атомного уровня. Чтобы лучше понять атомный уровень магнетизма, Гриффитс объясняет это в другой книге…
Электромагнетизм
Чтобы создать магнит или магнитное поле, нам нужно посмотреть, как они генерируются. Связь между током и магнитным полем подчиняется правилу правой руки. Когда ток проходит через провод, вокруг провода формируется магнитное поле в направлении ваших пальцев, когда они обвивают его. Это упрощение закона силы Ампера, поскольку он действует на провод с током. Теперь, если вы поместите тот же самый провод в ранее существовавшее магнитное поле, вы можете создать силу. Эта сила называется силой Лоренца.
Правило правой руки показывает направление магнитного поля относительно пути тока.
(Фото: HyperPhysics)
Если ток увеличивается, сила магнитного поля увеличивается. Хотя, чтобы сделать что-то полезное с полем, потребовалось бы невероятное количество тока. Кроме того, провод, передающий ток, будет иметь такую же магнитную силу, что создаст неконтролируемые поля. Согнув проволоку в петлю, можно создать направленное и концентрированное поле.
Поле не изменилось. Изгибая провод в петлю, направления поля просто выравниваются.
(Источник: HyperPhysics)
Электромагниты
Закручивая провод и пропуская ток, создается электромагнит. Если одна проволочная петля может концентрировать поле, что можно сделать с большим количеством? Как насчет еще нескольких сотен ! Чем больше петель вы добавляете в цепь, тем сильнее становится поле для данного тока. Если это так, почему мы не видим тысяч **, если не **миллионов , обмоток двигателей и электромагнитов? Ну, чем длиннее провод, тем выше его сопротивление.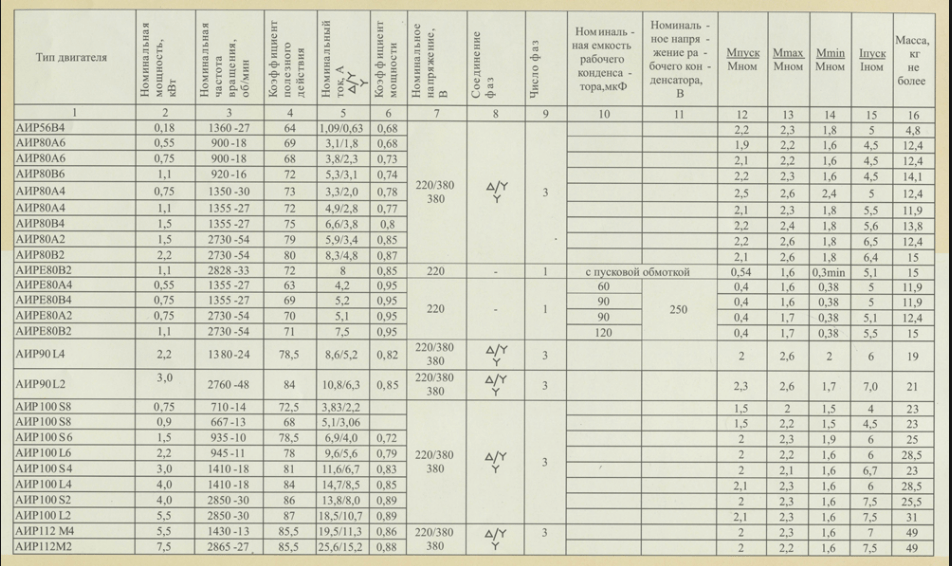 Закон Ома (V = I*R) гласит, что для поддержания того же тока при увеличении сопротивления напряжение должно увеличиваться. В некоторых случаях имеет смысл использовать более высокие напряжения; в других случаях некоторые используют провод большего размера с меньшим сопротивлением. Использование проволоки большего диаметра обходится дороже и, как правило, с ней труднее работать. Эти факторы необходимо учитывать при проектировании двигателя.
Закон Ома (V = I*R) гласит, что для поддержания того же тока при увеличении сопротивления напряжение должно увеличиваться. В некоторых случаях имеет смысл использовать более высокие напряжения; в других случаях некоторые используют провод большего размера с меньшим сопротивлением. Использование проволоки большего диаметра обходится дороже и, как правило, с ней труднее работать. Эти факторы необходимо учитывать при проектировании двигателя.
Электромагнит под напряжением, создающий магнитное поле.
(Фото: HyperPhysics)
Время эксперимента
Чтобы создать свой собственный электромагнит, просто найдите болт (или другой круглый стальной предмет), магнитную проволоку (размер 30-22 отлично подойдет) и батарею.
Примечание. Для этого эксперимента рекомендуются литиевые батареи , а НЕ .
Оберните 75-100 витков проволоки вокруг стали. Использование стального центра дополнительно концентрирует магнитное поле, увеличивая его эффективную силу. Мы рассмотрим, почему это происходит, в следующем разделе.
Мы рассмотрим, почему это происходит, в следующем разделе.
Немного термоусадочной пленки или ленты может помочь удержать катушки в стальном центре.
Теперь с помощью наждачной бумаги удалите изоляцию с концов проводов и подключите каждый провод к каждой клемме аккумулятора. Поздравляем! Вы построили первый компонент двигателя! Чтобы проверить силу электромагнита, попробуйте взять скрепки или другие мелкие стальные предметы.
Это не магия, это НАУКА!!!
Ферромагнетизм
Возвращаясь к началу нашего мысленного эксперимента, магнитные поля могут создаваться только током. Принимая определение тока как потока электронов, электроны, вращающиеся вокруг атома, должны создавать ток и, следовательно, магнитное поле! Если в каждом атоме есть электроны, все ли магнитное? ДА! Вся материя, включая лягушек, может проявлять магнитные свойства, если ей придается достаточно энергии. Но не весь магнетизм создается одинаково. Причина, по которой я могу поднимать винты магнитом холодильника, а не лягушкой, заключается в разнице между ферромагнетизмом и парамагнетизмом. Способ различить два (и еще несколько типов) — это изучение квантовой механики.
Способ различить два (и еще несколько типов) — это изучение квантовой механики.
Ферромагнетизм будет в центре нашего внимания, так как это сильнейшее явление, с которым у нас больше всего опыта. Кроме того, чтобы избавить нас от необходимости понимать это на квантовом уровне, мы примем, что атомы ферромагнитных материалов имеют тенденцию выравнивать свои магнитные поля со своими соседями. Хотя они имеют тенденцию к выравниванию, несоответствия материалов и другие факторы, такие как кристаллическая структура, создают магнитные домены.
Когда магнитные домены выстраиваются в случайном порядке, соседние поля компенсируют друг друга, что приводит к ненамагничиванию материала. Однажды при наличии сильного внешнего поля можно перенастроить эти домены. При выравнивании этих доменов общее поле усиливается, создавая магнит!
(Фото: HyperPhysics)
Эта перестройка может быть постоянной в зависимости от силы поля. Это здорово, потому что они понадобятся нам в следующем разделе.
Постоянные магниты
Постоянные магниты ведут себя так же, как электромагниты. Единственная разница в том, что они постоянны.
На всех рисунках стрелки будут указывать от северного полюса к южному. Другое соглашение состоит в том, чтобы использовать красный цвет для обозначения севера и синий цвет для обозначения юга. Чтобы определить полярность магнитов, вы можете использовать компас. Поскольку противоположности притягиваются, стрелка будет указывать на север к южному полюсу магнита.
Вы можете провести тот же эксперимент с электромагнитом, чтобы определить полярность.
Если вы измените направление тока, вы увидите, как электромагнит может поменять местами полюса.
Это ключевой принцип создания двигателей! Теперь давайте посмотрим на различные двигатели и на то, как в них используются магниты и электромагниты.
Щеточные двигатели постоянного тока — классический вариант
Щеточный двигатель постоянного тока — один из самых простых современных двигателей.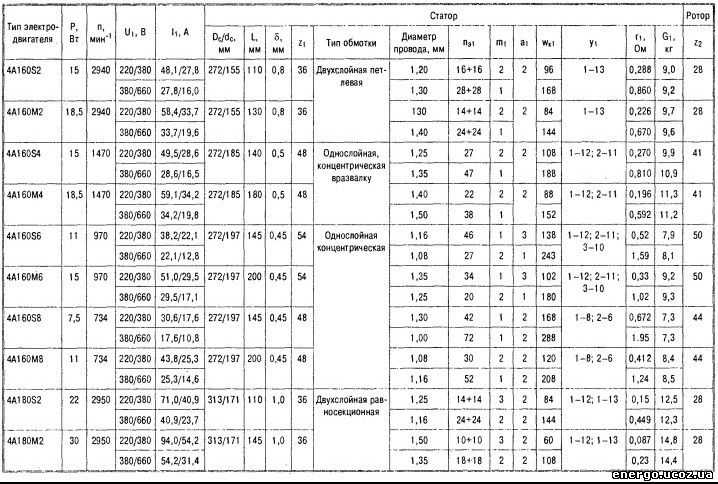 Вы можете найти эти двигатели почти везде. Они есть в бытовой технике, игрушках и автомобилях. Будучи простыми в конструкции и управлении, эти двигатели являются идеальным решением как для профессионалов, так и для любителей.
Вы можете найти эти двигатели почти везде. Они есть в бытовой технике, игрушках и автомобилях. Будучи простыми в конструкции и управлении, эти двигатели являются идеальным решением как для профессионалов, так и для любителей.
Анатомия мотора-щетки
Чтобы лучше понять, как он работает, давайте начнем с разборки простого мотора для хобби. Как видите, они просты по конструкции и состоят из нескольких ключевых компонентов.
- Щетки — Передают питание от контактов к якорю через коммутатор
- Контакты — Подводит питание от контроллера к щеткам
- Коммутатор — подает питание на соответствующий набор обмоток при вращении якоря
- Обмотки — преобразуют электричество в магнитное поле, которое приводит в движение ось
- Ось — передает механическую мощность двигателя в пользовательское приложение
- Магниты — Создают магнитное поле для притяжения и отталкивания обмоток
- Втулка — минимизирует трение оси
- Банка — Обеспечивает механический кожух для двигателя
Принцип работы
Когда обмотки находятся под напряжением, они притягиваются к магнитам, расположенным вокруг двигателя. Это вращает двигатель до тех пор, пока щетки не соприкоснутся с новым набором контактов коммутатора. Этот новый контакт подает питание на новый набор обмоток и снова запускает процесс. Чтобы изменить направление вращения двигателя, просто поменяйте полярность на контактах двигателя. Искры внутри электродвигателя щетки возникают из-за того, что щетка перескакивает на следующий контакт. Каждый провод катушки подключается к двум ближайшим контактам коммутатора.
Это вращает двигатель до тех пор, пока щетки не соприкоснутся с новым набором контактов коммутатора. Этот новый контакт подает питание на новый набор обмоток и снова запускает процесс. Чтобы изменить направление вращения двигателя, просто поменяйте полярность на контактах двигателя. Искры внутри электродвигателя щетки возникают из-за того, что щетка перескакивает на следующий контакт. Каждый провод катушки подключается к двум ближайшим контактам коммутатора.
Нечетное число обмоток всегда используется для предотвращения блокировки двигателя в установившемся режиме. В более крупных двигателях также используется больше наборов обмоток, чтобы устранить «зубчатость», что обеспечивает плавное управление при низких оборотах в минуту (об/мин). Зубчатое зацепление можно продемонстрировать, вращая ось двигателя вручную. Вы почувствуете «удары» в движении, где магниты находятся ближе всего к открытому статору. Зазубренность можно устранить с помощью нескольких конструктивных приемов, но наиболее распространенным является полное удаление статора. Эти типы двигателей называются двигателями без железа или без сердечника.
Эти типы двигателей называются двигателями без железа или без сердечника.
Профи
- Простота управления
- Отличный крутящий момент при низких оборотах
- Недорогой и массовый
Минусы
- Щетки со временем изнашиваются
- Дуговые разряды щеток могут создавать электромагнитные помехи
- Обычно скорость ограничена из-за нагрева щеток
Бесщеточные двигатели — БОЛЬШЕ МОЩНОСТИ!
Бесщеточные двигатели берут верх! Хорошо, возможно, это было преувеличением. Тем не менее, бесщеточные двигатели начали доминировать на рынках хобби между самолетами и наземными транспортными средствами. Управление этими двигателями было проблемой до тех пор, пока микроконтроллеры не стали дешевыми и достаточно мощными, чтобы справляться с этой задачей. Все еще ведется работа по разработке более быстрых и эффективных контроллеров, чтобы раскрыть их удивительный потенциал. Без щеток, которые могут выйти из строя, эти двигатели обеспечивают большую мощность и могут работать бесшумно.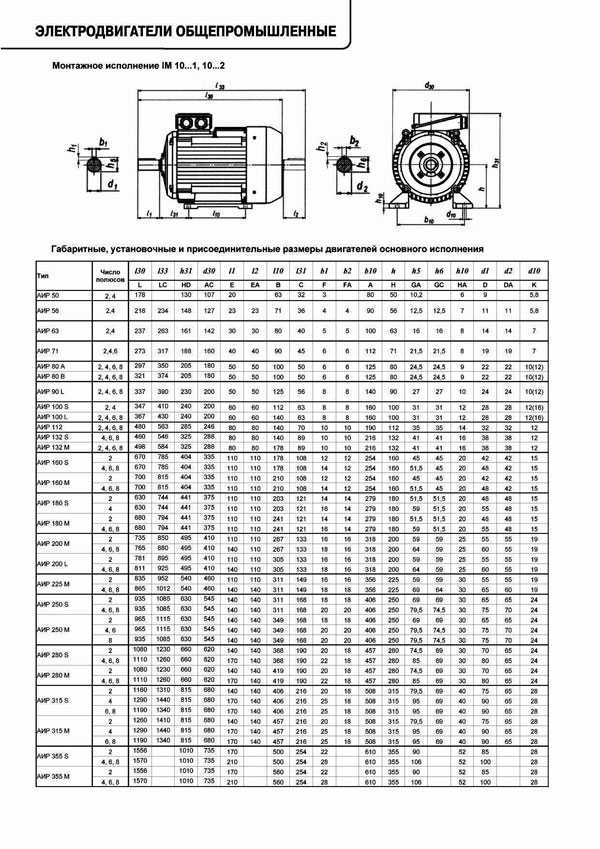 Большинство высокотехнологичных приборов и транспортных средств переходят на бесщеточные системы. Одним из ярких примеров является Tesla Model S. 9.0005
Большинство высокотехнологичных приборов и транспортных средств переходят на бесщеточные системы. Одним из ярких примеров является Tesla Model S. 9.0005
Анатомия бесщеточного двигателя
Чтобы лучше понять, как он работает, давайте начнем с разборки простого бесщеточного двигателя. Они обычно встречаются на самолетах и вертолетах с дистанционным управлением.
- Обмотки — преобразуют электричество в магнитное поле, которое приводит в движение ротор
- Контакты — Подводит питание от контроллера к обмоткам
- Подшипники — минимизирует трение оси
- Магниты — создают магнитное поле для притяжения и отталкивания обмоток
- Ось — передает механическую мощность двигателя в пользовательское приложение
Принцип действия
Механизм бесщеточного двигателя невероятно прост. Единственной движущейся частью является ротор, который содержит магниты. Там, где все усложняется, это оркестровка последовательности запитывающих обмоток.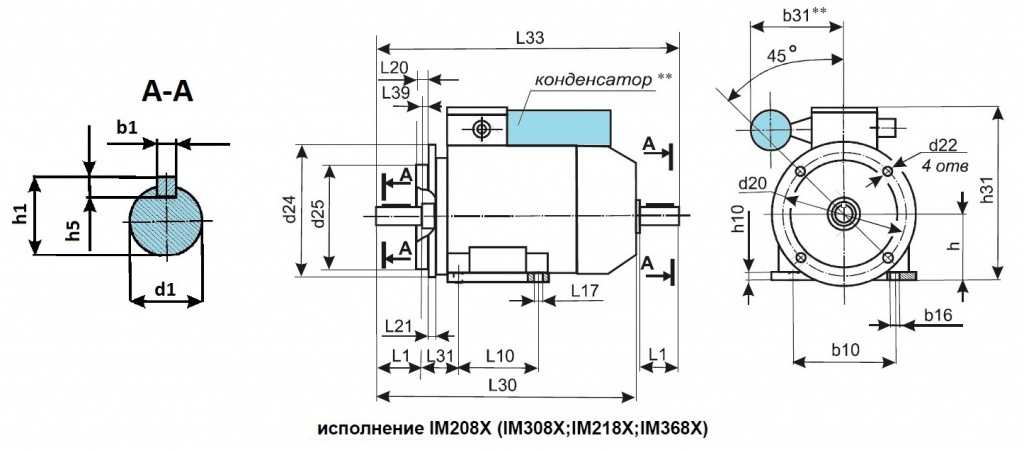 Полярность каждой обмотки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой обмотке эффект «тяни-толкай». Хитрость заключается в том, чтобы синхронизировать эту схему со скоростью ротора. Это можно сделать двумя (широко используемыми) способами. Большинство контроллеров для хобби измеряют напряжение, создаваемое (обратные электромагнитные помехи) на обесточенной обмотке. Этот метод очень надежен при работе на высоких скоростях. По мере того, как двигатель вращается медленнее, возникающее напряжение становится труднее измерить, и возникает больше ошибок. В более новых контроллерах для хобби и во многих промышленных контроллерах используются датчики на эффекте Холла для непосредственного измерения положения магнитов. Это основной метод управления компьютерными вентиляторами.
Полярность каждой обмотки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой обмотке эффект «тяни-толкай». Хитрость заключается в том, чтобы синхронизировать эту схему со скоростью ротора. Это можно сделать двумя (широко используемыми) способами. Большинство контроллеров для хобби измеряют напряжение, создаваемое (обратные электромагнитные помехи) на обесточенной обмотке. Этот метод очень надежен при работе на высоких скоростях. По мере того, как двигатель вращается медленнее, возникающее напряжение становится труднее измерить, и возникает больше ошибок. В более новых контроллерах для хобби и во многих промышленных контроллерах используются датчики на эффекте Холла для непосредственного измерения положения магнитов. Это основной метод управления компьютерными вентиляторами.
Профи
- Надежный
- Высокая скорость
- Эффективный
- Массовое производство, легко найти
Минусы
- Сложно управлять без специального контроллера
- Требуются низкие пусковые нагрузки
- Обычно для приводов требуются специальные редукторы
Шаговые двигатели — простая точность
Шаговые двигатели отлично подходят для управления положением.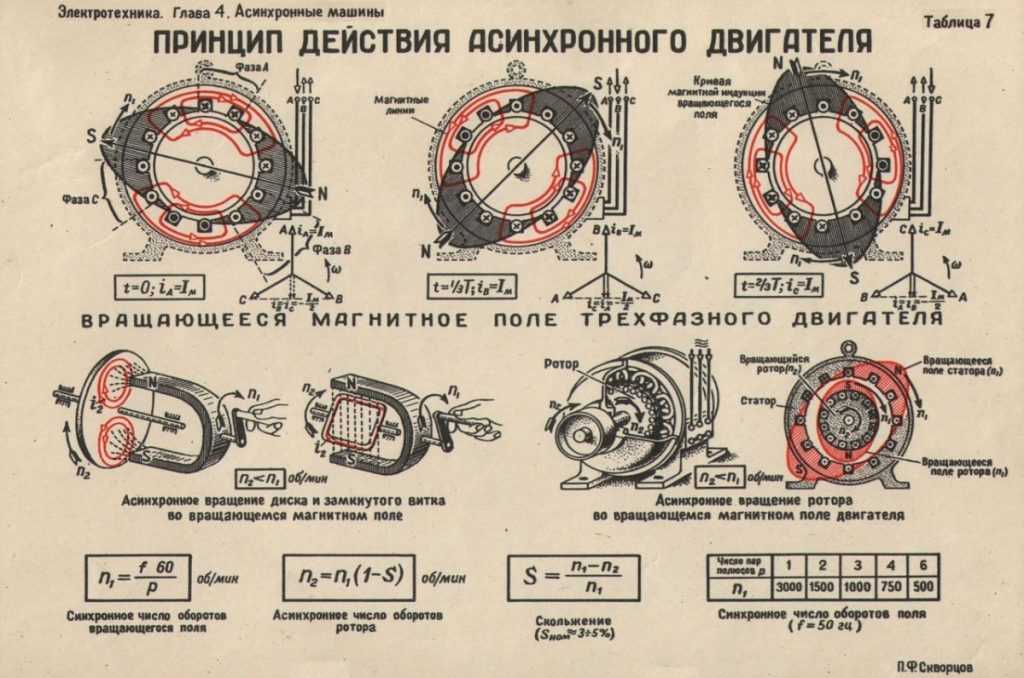 Их можно найти в настольных принтерах, плоттерах, 3D-принтерах, фрезерных станках с ЧПУ и во всем, что требует точного контроля положения. Шаговые двигатели — это особый сегмент бесколлекторных двигателей. Они специально созданы для высокого удерживающего крутящего момента. Этот высокий удерживающий момент дает пользователю возможность постепенно «шагать» к следующему положению. В результате получается простая система позиционирования, не требующая энкодера. Это делает контроллеры шаговых двигателей очень простыми в сборке и использовании.
Их можно найти в настольных принтерах, плоттерах, 3D-принтерах, фрезерных станках с ЧПУ и во всем, что требует точного контроля положения. Шаговые двигатели — это особый сегмент бесколлекторных двигателей. Они специально созданы для высокого удерживающего крутящего момента. Этот высокий удерживающий момент дает пользователю возможность постепенно «шагать» к следующему положению. В результате получается простая система позиционирования, не требующая энкодера. Это делает контроллеры шаговых двигателей очень простыми в сборке и использовании.
Анатомия шагового двигателя
Чтобы лучше понять, как он работает, давайте начнем с разборки простого шагового двигателя. Как видите, эти двигатели созданы для нагрузок с прямым приводом и содержат несколько ключевых компонентов.
- Ось — передает механическую мощность двигателя в пользовательское приложение
- Подшипники — минимизирует трение оси
- Магниты — Создают магнитное поле для притяжения и отталкивания обмоток
- Полюса — Увеличивает разрешение ступенчатого расстояния за счет фокусировки магнитного поля
- Обмотки — преобразуют электричество в магнитное поле, которое приводит в движение ось
- Контакты — Подводит питание от контроллера к обмоткам
Теория работы
(Источник: PCB Heaven)
Шаговые двигатели ведут себя точно так же, как и бесщеточные, только размер шага намного меньше. Единственной движущейся частью является ротор, который содержит магниты. Там, где все усложняется, это оркестровка последовательности запитывающих обмоток. Полярность каждой обмотки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой обмотке эффект «тяни-толкай». Заметная разница заключается в том, как отличается магнитная структура шагового двигателя. Трудно заставить массив магнитов хорошо себя вести в небольшом масштабе. Это также очень дорого. Чтобы обойти это, в большинстве шаговых двигателей используется метод сложенных пластин, чтобы направить магнитные полюса в «зубья».
Единственной движущейся частью является ротор, который содержит магниты. Там, где все усложняется, это оркестровка последовательности запитывающих обмоток. Полярность каждой обмотки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой обмотке эффект «тяни-толкай». Заметная разница заключается в том, как отличается магнитная структура шагового двигателя. Трудно заставить массив магнитов хорошо себя вести в небольшом масштабе. Это также очень дорого. Чтобы обойти это, в большинстве шаговых двигателей используется метод сложенных пластин, чтобы направить магнитные полюса в «зубья».
В бесщеточном двигателе обратная ЭДС используется для измерения скорости. Шаговый двигатель полагается на короткий ход каждой обмотки, чтобы «гарантировать» достижение желаемого момента времени. При движении на высокой скорости это может привести к остановке, когда ротор не успевает за последовательностью. Есть способы обойти это, но они основаны на более глубоком понимании взаимосвязи между обмотками двигателя и индуктивностью.
Есть способы обойти это, но они основаны на более глубоком понимании взаимосвязи между обмотками двигателя и индуктивностью.
Pros
- Превосходная точность позиционирования
- Высокий удерживающий момент
- Высокая надежность
- Большинство степперов имеют стандартные размеры
Минусы
- Малый шаг ограничивает максимальную скорость
- Можно «пропускать» шаги при больших нагрузках
- Постоянно потребляет максимальный ток
Линейные двигатели — Будущее!!!
Будущее линейно! В высокоскоростных машинах для захвата и размещения скорость решает все. Со скоростью приходит трение, с трением приходит обслуживание, с обслуживанием приходит время простоя, с временем простоя приходит потеря производительности. Благодаря удалению компонентов, необходимых для преобразования вращательного движения в поступательное, система становится намного легче и эффективнее. Линейные двигатели просты в обслуживании и невероятно надежны, поскольку имеют только одну движущуюся часть. Я упоминал, что они невероятно быстрые?! Это машина захвата и размещения, которую мы используем в производстве, и она невероятно быстра! Эта машина тоже обладает таким ударом, на ней есть предупреждение для кардиостимуляторов. Есть целый ряд мощных редкоземельных магнитов.
Я упоминал, что они невероятно быстрые?! Это машина захвата и размещения, которую мы используем в производстве, и она невероятно быстра! Эта машина тоже обладает таким ударом, на ней есть предупреждение для кардиостимуляторов. Есть целый ряд мощных редкоземельных магнитов.
Анатомия линейного двигателя
Чтобы лучше понять, как он работает, давайте заглянем внутрь нашей машины и разместим ее внизу.
- Модуль движения — содержит электромагниты и контроллер.
- Магниты. Создают магнитное поле для притяжения и отталкивания катушек.
- Линейный подшипник — удерживает двигатель на одной линии с магнитами и является единственной движущейся частью.
Принцип действия
Механизм линейного двигателя почти идентичен бесщеточному двигателю. Единственная разница в том, что если вы возьмете бесколлекторный двигатель и развернете его в виде прямой линии, у вас будет линейный двигатель. Модуль движения является единственной движущейся частью. Все усложняется в организации последовательности возбуждающих катушек. Полярность каждой катушки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой катушке эффект «тяни-толкай». В линейном двигателе обычно есть энкодер или какая-либо усовершенствованная система позиционирования для отслеживания местоположения модуля движения. Для достижения высокой точности позиционирования контроллеры намного сложнее, чем в обычной системе. Микрошаг — это метод «дросселирования» магнитов для обеспечения плавного и точного движения. Однако для этого линейным двигателям требуется узкоспециализированный контроллер, настроенный для каждого двигателя. По мере совершенствования технологии контроллеров мы, вероятно, увидим снижение цен на эти двигатели. Возможно, когда-нибудь наши 3D-принтеры будут печатать за секунды, а не за часы!
Все усложняется в организации последовательности возбуждающих катушек. Полярность каждой катушки регулируется направлением тока. Анимация демонстрирует простой шаблон, которому будут следовать контроллеры. Переменный ток меняет полярность, придавая каждой катушке эффект «тяни-толкай». В линейном двигателе обычно есть энкодер или какая-либо усовершенствованная система позиционирования для отслеживания местоположения модуля движения. Для достижения высокой точности позиционирования контроллеры намного сложнее, чем в обычной системе. Микрошаг — это метод «дросселирования» магнитов для обеспечения плавного и точного движения. Однако для этого линейным двигателям требуется узкоспециализированный контроллер, настроенный для каждого двигателя. По мере совершенствования технологии контроллеров мы, вероятно, увидим снижение цен на эти двигатели. Возможно, когда-нибудь наши 3D-принтеры будут печатать за секунды, а не за часы!
Профи
- Надежный
- Высокая скорость
- Эффективный
- Преобразование вращения в линейное не требуется
Минусы
- Дорого
- Требуются специальные контроллеры
- Предназначен для каждой системы
- Я упоминал дорого?
Ресурсы и дальнейшее развитие
Итак, мы рассмотрели несколько различных типов двигателей и способы их использования.
- Передаточное число
- Подшипники
- Цепные передачи
- Широтно-импульсная модуляция
- Н-образные мосты для управления двигателем
- Краткое руководство пользователя Ardumoto
И, наконец, это прекрасное место, где можно узнать обо всем, что связано с физикой.
- Гиперфизика
10 моментов, которые следует учитывать при выборе электродвигателя
Выбор электродвигателя, подходящего для конкретного автомобиля, не всегда прост.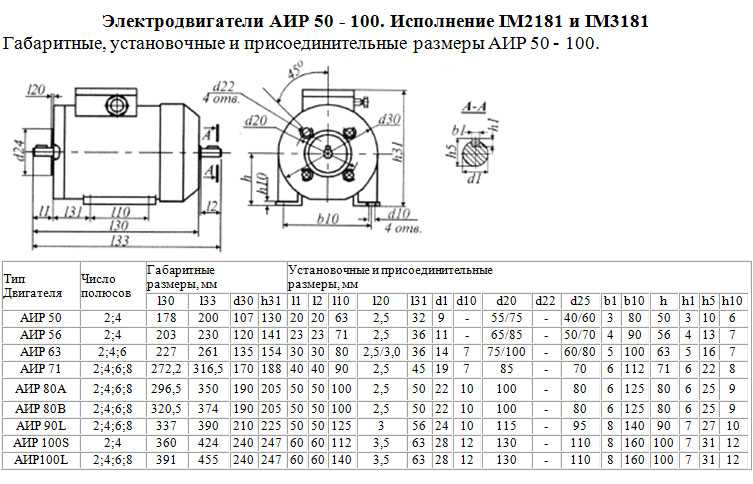 Существует так много переменных, которые необходимо учитывать, что может быть трудно понять, с чего начать. Учитывая стоимость аккумуляторов и электродвигателей, чтобы найти наиболее экономичное решение, следует искать силовой агрегат, который будет максимально соответствовать требуемым характеристикам автомобиля.
Существует так много переменных, которые необходимо учитывать, что может быть трудно понять, с чего начать. Учитывая стоимость аккумуляторов и электродвигателей, чтобы найти наиболее экономичное решение, следует искать силовой агрегат, который будет максимально соответствовать требуемым характеристикам автомобиля.
В этой статье мы рассмотрим 10 основных вопросов, на которые вам необходимо ответить, прежде чем пытаться найти подходящий двигатель для вашего проекта. По сути, вам необходимо определить самые высокие требования к вашему автомобилю, а также оценить, как различные дорожные условия повлияют на работу силового агрегата:
1. Характеристики автомобиля
Свойства автомобиля, такие как размер, вес, перегрузка и аэродинамика являются важнейшими характеристиками транспортного средства, которые в конечном итоге будут определять скорость, крутящий момент и требования к мощности электродвигателя. Эти аспекты помогут понять влияние условий эксплуатации автомобиля и имеют важное значение для выбора правильной трансмиссии.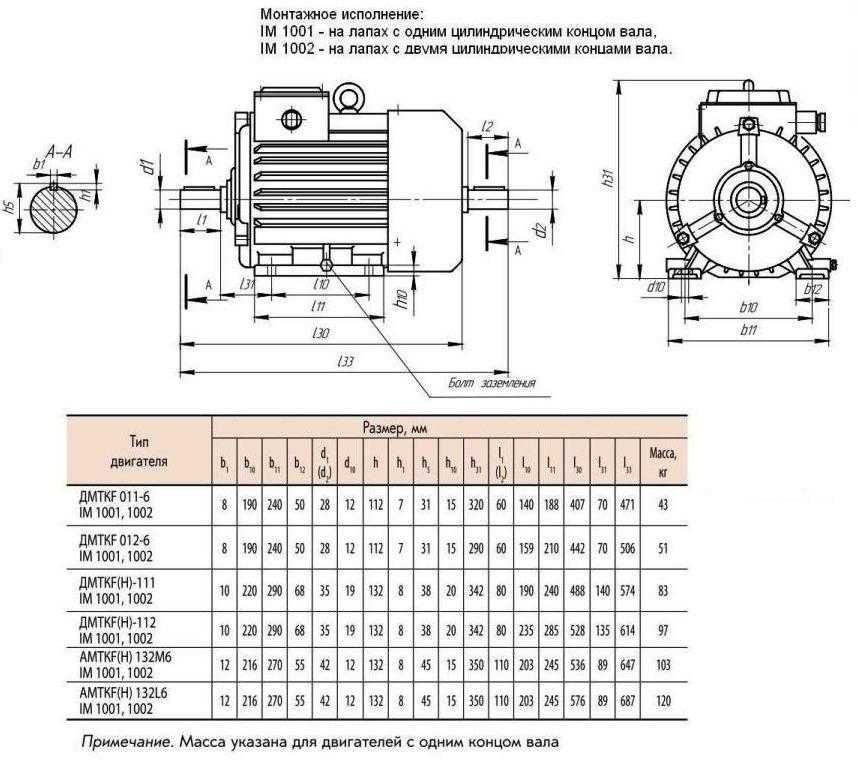 Имейте их в пределах досягаемости для следующих шагов.
Имейте их в пределах досягаемости для следующих шагов.
2. Ездовые циклы
То, как используется транспортное средство, также очень важно. Каковы будут обычные ездовые циклы автомобиля? Будет ли он ездить по городу с множеством остановок? Будет ли он ездить на большие расстояния с несколькими остановками? Все это поможет определить конфигурацию автомобиля (последовательный гибрид, параллельный гибрид, полностью электрический) и размер аккумуляторной батареи и, в конечном итоге, повлияет на выбор трансмиссии.
3. Комплектация автомобиля (электрическая, гибридная)
Автомобиль гибридный или полностью электрический? Если гибрид, то это параллельный гибрид или последовательный гибрид? Как правило, если маршруты транспортных средств непредсказуемы или если они будут перемещаться на большие расстояния, обычно предпочтение отдается гибридной архитектуре.
Полностью электрическая конфигурация хорошо подходит для езды по городу, где расстояние между точками зарядки не слишком велико, скорость низкая, а количество остановок велико.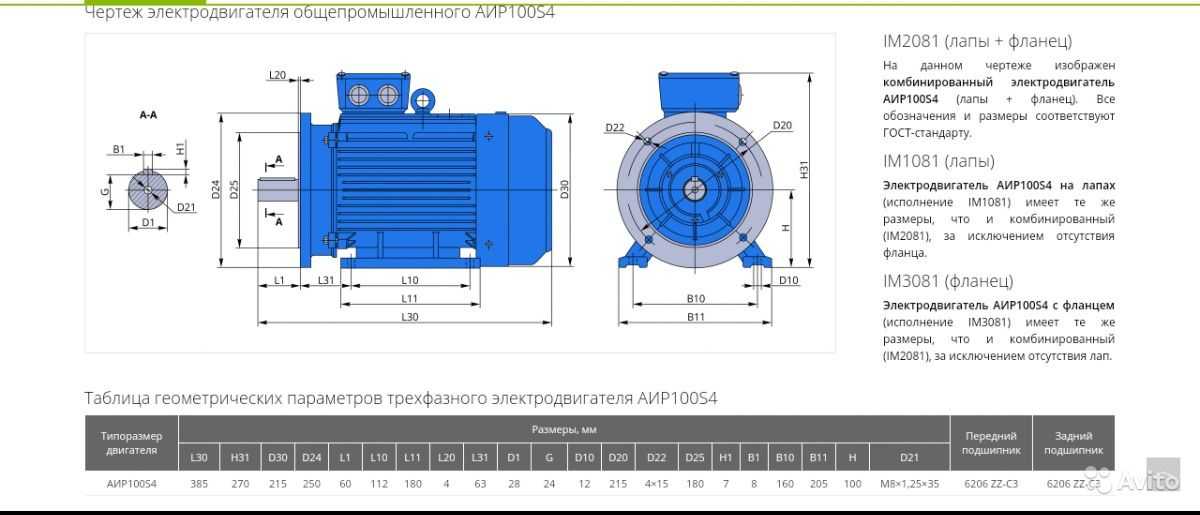
TM4 может предложить большинство из этих конфигураций.
4. Максимальная скорость
Какова целевая максимальная скорость автомобиля? Как долго его надо выдерживать, может он используется только для прохождения?
Какие передаточные числа доступны (при использовании коробки передач) и дифференциальное передаточное число? Чему равен радиус качения колеса? На все эти вопросы необходимо ответить и использовать их в расчетах, чтобы определить максимальную скорость, которую должен развивать электродвигатель в вашем приложении.
5. Максимальный крутящий момент
Максимальный крутящий момент позволяет автомобилю трогаться с заданного уклона. Вам нужно найти самый высокий уровень, на который транспортное средство должно подняться. Используя эту оценку, можно рассчитать максимальный крутящий момент, требуемый электродвигателю, с учетом дифференциала и коробки передач (при использовании коробки передач!). Также следует учитывать максимальный вес.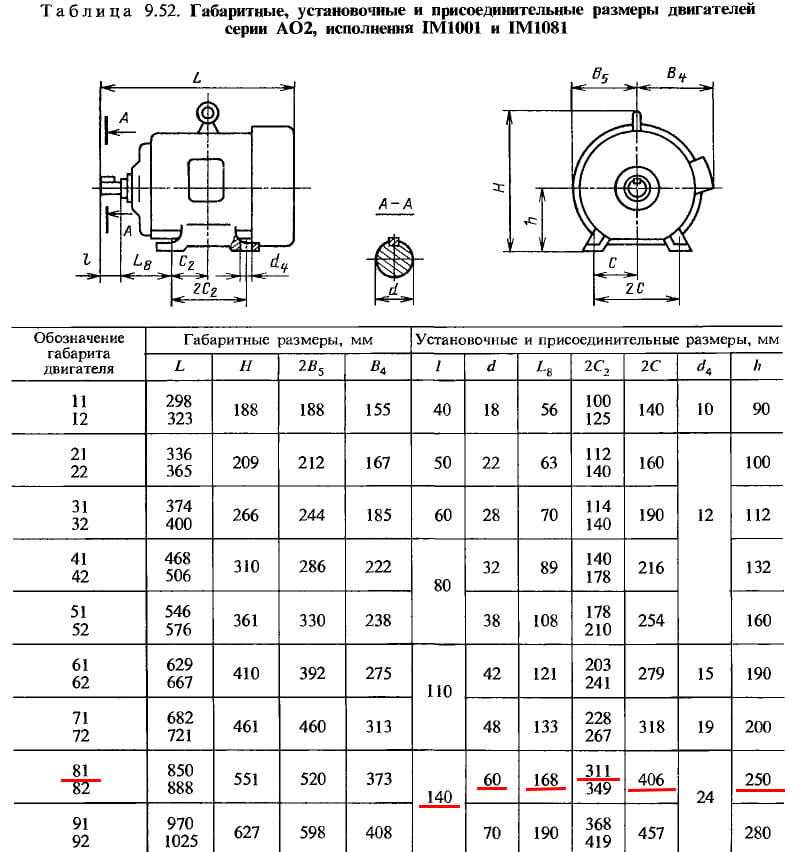
6. Максимальная мощность
Некоторые подъемы нужно преодолевать с минимальной скоростью, другие нет. Иногда максимальная мощность обнаруживается просто на максимальной скорости (это тот случай, когда автомобиль имеет как большую лобовую площадь, так и едет на очень большой скорости). Это означает, что двигатель должен быть достаточно мощным, чтобы выдержать любые условия, в которых может находиться автомобиль!
Максимальная мощность позволяет автомобилю развивать и поддерживать постоянную скорость в условиях жесткого уклона и скорости. Для расчета максимальной мощности необходимо иметь симулятор, учитывающий коэффициенты лобового сопротивления и трения транспортного средства в дополнение к силам, необходимым для набора высоты.
Опять же, продолжительность состояния также имеет значение: , в отличие от двигателей внутреннего сгорания, пиковая мощность электродвигателя не может поддерживаться постоянно, и выбор электродвигателя, способного выдерживать наихудшие условия подъема в гору, был бы чрезмерным. нет ограничений по времени.
нет ограничений по времени.
7. Емкость аккумулятора
Емкость аккумулятора обычно рассчитывается с помощью симулятора для прохождения эталонного цикла, характерного для использования транспортного средства. Симулятор может выводить потребление транспортного средства в кВтч/км. Из этого значения можно рассчитать емкость батареи, умножив ее на желаемый диапазон.
8. Напряжение аккумулятора
Напряжение аккумулятора зависит от размера автомобиля. По мере увеличения напряжения батареи выходной ток снижается. Таким образом, в случаях, когда постоянная мощность транспортного средства высока, например, в более крупных транспортных средствах, вы хотите сохранить размер проводников на управляемом уровне, увеличив напряжение батареи.
Обычно существует два диапазона напряжений: 300–450 В постоянного тока и 500–750 В постоянного тока. Это связано с ограничением напряжения IGBT, используемых в контроллере двигателя, и двумя основными стандартными напряжениями, доступными для них: 600 В постоянного тока и 1200 В постоянного тока.
9. Коробка передач или прямой привод?
Потребуется ли для архитектуры трансмиссии коробка передач? Вы хотите сократить расходы, связанные с внедрением трансмиссии и/или упростить вашу систему?
Электрическая трансмиссия TM4 SUMO предлагает подход с прямым приводом: высокий крутящий момент/низкая скорость двигателя позволяют ему напрямую взаимодействовать со стандартными осевыми дифференциалами без необходимости использования промежуточного редуктора. Повышая надежность системы и снижая общие затраты на техническое обслуживание, удаление трансмиссии в электромобиле также значительно повышает эффективность трансмиссии, позволяя оптимально использовать энергию, хранящуюся в аккумуляторной батарее.
10. Стоимость
И последнее, но не менее важное: каков ваш бюджет? В предыдущем сообщении в блоге мы рассмотрели различные технологии электродвигателей , доступные на рынке, их плюсы и минусы, а также их относительное использование в электромобилях.
Подводя итоги
После того, как вы соберете всю информацию, упомянутую выше, вам потребуются правильные инструменты, которые позволят вам рассчитать требования к компонентам на основе характеристик автомобиля. TM4 может помочь вам сделать осознанный выбор при выборе двигателя. Свяжитесь с нами с вышеуказанной информацией под рукой.
- Автор
- Последние сообщения
Кристиан Проновост
Старший менеджер по продукции TM4 Inc.
Кристиан Проновост получил степень бакалавра наук. получил степень в École Polytechnique de Montréal в Канаде в 1992 году и работает в TM4 с 1998 года в качестве старшего инженера-электрика. Он принимал участие в разработке базовой технологии современных двигателей и инверторов для технологий автомобильных электрических силовых агрегатов. В настоящее время он работает менеджером по продуктовой стратегии линейки продуктов TM4; он выступает в качестве ведущего инженера по продуктам, определяя потребности рынка и инновационные решения.