
Частотный преобразователь — принцип работы, схема подключения частотника
Чтобы подключить частотник к асинхронному трёхфазному двигателю, следует хотя бы на минимальном уровне разбираться в схеме его подключения и принципах работы. Нижеприведённая информация позволяет изучить данную тему.
Принцип управления электродвигателем
Ротор электрического двигателя функционирует благодаря вращению электромагнитных полей под статорной обмоткой. Скорость движения ротора находится в зависимости от промышленной частоты питающей сети.
Стандартное её значение составляет 50Гц и вызывает соответственно пятьдесят колебательных периодов за секунду. На протяжении минуты количество оборотов увеличивается до трёх тысяч. Настолько же часто осуществляются обороты ротора подвергаемого воздействию электромагнитных полей.
При изменении уровня прилагаемой к статору частоты, появляется возможность управления вращательной скоростью ротора и соединяемого с ним привода. Именно благодаря этому принципу осуществляется управление электродвигателем.
Классификация частотных преобразователей
По своим конструктивным различиям модели частотного преобразователя делятся на:
Индукционные.
Сюда относятся электрические двигатели имеющие асинхронный принцип работы. Данные устройства не отличаются высоким уровнем КПД и значительной эффективностью. Ввиду этих качеств они не имеют большой доли в общем числе преобразователей и редко применяются.
Электронные.
Пригодны для осуществления плавного управления оборотами в машинах асинхронного и синхронного типа. Управление в электронных моделях может производиться двумя способами:
Скалярный (согласно предварительно введённым параметрам взаимозависимости вращательной V и частоты).
Наиболее простой подход к управлению, довольно неточный.
Векторный.
Отличительной характеристикой является точность управления.
Векторное управление преобразователем частот
Принцип работы векторного управления заключается в следующем: при нём оказывается воздействие на магнитный поток, изменяя направление его «пространственного вектора» и регулирующий роторную частоту поля.
Создать рабочий алгоритм частотного преобразователя с векторным управлением можно при помощи двух способов:
Бессенсорное управление.
Осуществляется за счёт назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается.
Потокорегулирование.
Рабочие токи устройства регулируются. При этом они раскладываются на активный и реактивный компонент. Это облегчает возможность внесения корректирующих изменений в рабочий процесс (изменение амплитуд, частот, векторных углов, которые имеет напряжение на выходе).
Способствует повышению точности и диапазона регуляции вращений асинхронного двигателя. Весьма актуален такой подход для устройства с малыми оборотами и высоким уровнем двигательных нагрузок.

В целом, схема векторного управления более прочих подходит для динамической регулировки вращающегося момента трёхфазного асинхронного двигателя.
Подключение транзисторных ключей
Все шесть IGBT-транзисторов соединяются с соответствующими диодами обратного тока с соблюдением встречно-параллельной схемы. После по цепи силового подключения, образуемой каждым транзистором происходит прохождение активного тока асинхронного двигателя, с последующим направлением его реактивной составляющей через диоды. С целью обеспечения безопасности инвертора и асинхронного двигателя от воздействия сторонних электрических помех конструкция преобразователя частоты может включать в себя помехозащитные фильтры. Если промышленные источники постоянного тока имеют рабочее напряжение в 220 В, то они также могут использоваться для запитывания инверторов.
Как подключить частотник к асинхронному двигателю?
Используемый для управления частотой напряжения преобразователь зачастую используется для энергоснабжения трёхфазных двигателей. С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
При подключении частотного преобразователя следует предварительно разместить автоматический выключатель, функционирующий от тока сети по значению равного номинальному (или наиболее близкого к таковому) уровню потребления тока в двигателе. Если используется частотник трёхфазного типа, то соответственно следует воспользоваться трёхфазным автоматом с общим рычагом. Такой вариант обеспечивает быстрое обесточивание всех фаз сразу при замыкании на одной из них.
Ток срабатывания по своим характеристикам должен совпадать с однофазным током электрического двигателя.
В случае же, если для частотного преобразователя свойственно однофазное питание, то следует применить одинарный автомат, который подходит для работы с утроенным однофазным током.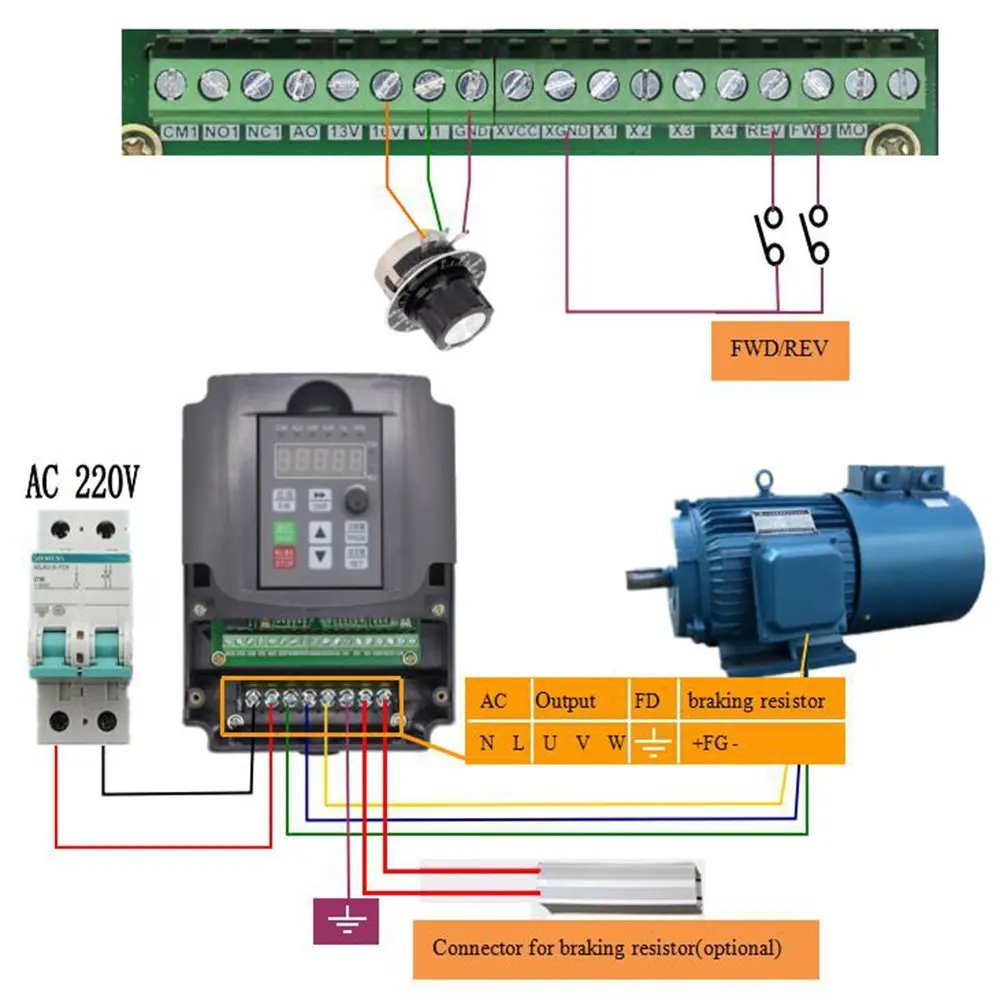
Однако, при любых обстоятельствах установку частотного преобразователя нельзя осуществлять через включение автомата в месте разрыва нулевых или заземляющих проводов. В таких условиях подразумевается только прямое включение автомата.
Дальнейшую настройку преобразователя частоты осуществляют через соединение с контактами электрического двигателя. Используются при этом фазные провода. Но предварительно производится соединение обмоток электрического двигателя по схеме «звезда» или «треугольник».
Работа по той или иной схеме базируется на том, каков тип преобразователя частоты и характер производимого им напряжения.
По стандарту корпус каждого двигателя имеет отметку с двумя значениями, которым может равняться напряжение. Если частотник продуцирует напряжение соответствующее нижней границы, то соединение осуществляется по типу «треугольник». В остальных случаях для использования принцип «звезды».
Месторасположение управляющего пульта, обязательно прилагающегося при покупке частотного преобразователя, следует подбирать тщательно, чтобы обеспечить наибольшее удобство пользования.
Подключения пульта управления осуществляется по схеме обозначенной в прилагаемой к преобразователю инструкции. После рукоятка фиксируется на нулевом уровне, и автомат включается. В этот момент должно наблюдаться свечение светового индикатора.
Для использования частотного преобразователя, следует надавить кнопку «RUN» (она уже запрограммирована надлежащим образом). Далее делается лёгкий поворот рукоятки, провоцирующий старт постепенного вращения электрического двигателя. Если вращение осуществляется в направлении, противоположном необходимому, то следует нажать реверс. После при помощи рукоятки настраивается требуемая частота вращения устройства. При этом следует учитывать, что на корпусе пульта управления зачастую прописаны не уровни частоты вращения двигателя, выражаемые в оборотах в минуту, а частоты, которую имеет питающее напряжение, выражаемое в герцах.
Чтобы ограничить пусковой ток и снизить пусковой момент в момент пуска асинхронного двигателя с уровнем мощности больше 5000Вт, используется подключение типа «звезда-треугольник». До достижения номинала скорости задействуется схема подключения частотного преобразователя «звезда», а после питание осуществляется по схеме «треугольник». В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
До достижения номинала скорости задействуется схема подключения частотного преобразователя «звезда», а после питание осуществляется по схеме «треугольник». В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
Логично, что использование такой схемы возможно только с двигателями, рассчитанными на подключения обоих типов.
Проведение работы по схеме «звезда-треугольник» всегда чревато резкими скачками уровня тока в противовес плавному нарастанию в условиях прямого пуска. В момент смены соединения скорость резко снижается и увеличить её можно только увеличив силу тока.
Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.
Watch this video on YouTube
Как подключить частотный преобразователь к электродвигателю?
Подключение частотного преобразователя к электродвигателю
Подключение частотника осуществляется с использованием автоматического выключателя, который работает с током, номинальным току, потребляемому двигателем. Если двигатель рассчитан на питание от трехфазной сети (где напряжение составляет 380В), то следует устанавливать трехфазный автомат с общим рычагом. Это позволит, при коротком замыкании одной из фаз, быстро обесточить остальные фазы. При этом характеристики тока должны соответствовать показателям тока одной фазы двигателя.
Если двигатель рассчитан на питание от трехфазной сети (где напряжение составляет 380В), то следует устанавливать трехфазный автомат с общим рычагом. Это позволит, при коротком замыкании одной из фаз, быстро обесточить остальные фазы. При этом характеристики тока должны соответствовать показателям тока одной фазы двигателя.
Если преобразователь частоты рассчитан на однофазный ток (где напряжение составляет 220В), то лучше использовать одинарный автомат, рассчитанный на утроенный ток одной фазы.
В любом случае, подключение частотного преобразователя к электродвигателю, следует выполнять только напрямую. Не допускается подключение через разрыв нулевого или заземляющего проводов.
Фазные провода преобразователя частоты присоединяются к соответствующим контактам электродвигателя. Перед этим производится соединение обмотки электродвигателя по одной из схем — «звезда» или «треугольник». При этом выбор типа соединения основан на характере напряжения, вырабатываемого частотным преобразователем.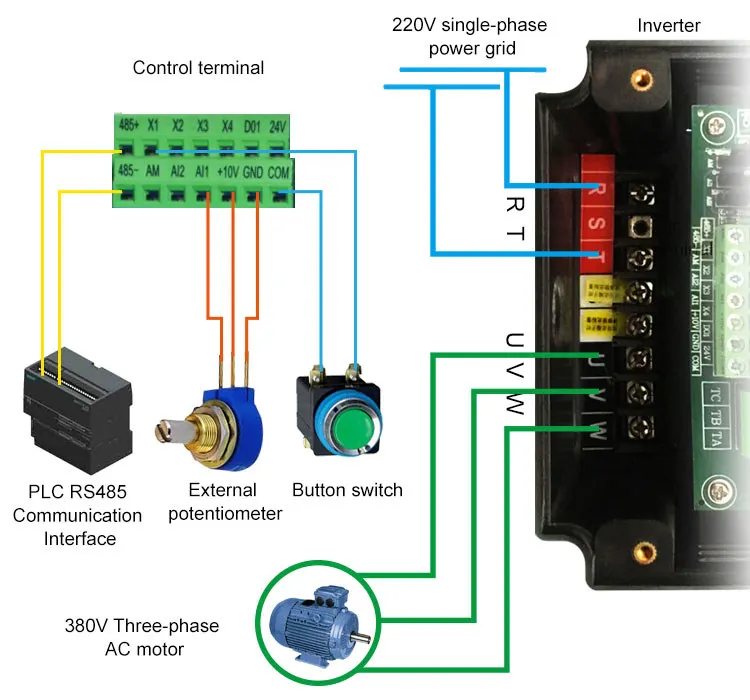
Тип соединения «треугольник» следует выбирать, если вырабатываемое напряжение соответствует меньшему значению напряжения, указанному на корпусе двигателя. Если напряжение соответствует большему показателю напряжения, указанному на корпусе электродвигателя, то обмотки соединяются по типу «звезда».
В комплект с частотным преобразователем входит пульт управления, который должен устанавливаться в удобном для оператора месте. Его подключение следует производить, строго соблюдая инструкцию, которая прилагается к частотному преобразователю. При монтаже необходимо установить рукоятку в нулевое положение и выполнить включение автомата. После того, как на пульте управления загорится индикатор, необходимо нажать на кнопку «RAN» (запрограммировано по умолчанию). После этого, следует повернуть рукоятку на некоторый угол отклонения, чтобы двигатель начал постепенно вращаться. Если двигатель начал вращение в противоположную сторону, необходимо включить реверс, нажав на соответствующую кнопку.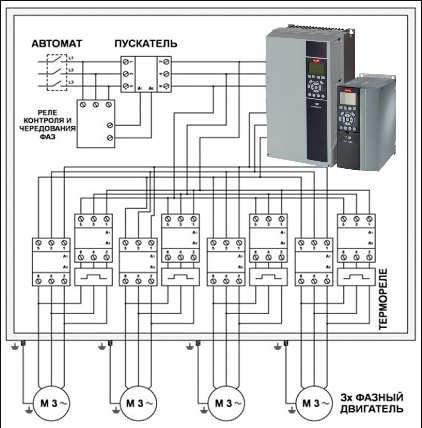
Далее осуществляется наладка положения рукоятки в соответствии с необходимой частотой вращения двигателя. При этом следует помнить, что на некоторых моделях частотных преобразователей указана не частота вращения электродвигателя, которая выражается в количестве оборотов в минуту, а частота питающего переменного тока, выраженная в герцах.
Несмотря на то, что принцип работы, подключения и настройки частотных преобразователей практически одинаковы, сегодня производители предлагают различные виды моделей, которые могут отличаться.
Для того чтобы безошибочно произвести подключение частотного преобразователя к электродвигателю, необходимо подробно ознакомиться с прилагаемой к частотнику документацией, изучить инструкцию, поскольку каждая модель может иметь особые рекомендации от производителя, которые необходимо учитывать при подключении частотника к двигателю.
Схема подключения, которая может быть указана в руководстве по подключению преобразователей частоты, поможет осуществить монтаж частотника безошибочно.
Самыми распространенными и востребованными на сегодняшний день являются частотные преобразователи, рассчитанные на диапазон напряжения от 220В до 380В.
При установке частотного преобразователя, следует помнить, что преобразователь частоты нельзя постоянно перегружать. Некоторый запас выходной мощности позволит обеспечить бесперебойную работу частотника и обеспечит более длительный срок его эксплуатации.
Подключение частотного преобразователя к электродвигателю, следует производить, строго соблюдая приложенные инструкции.
Вы всегда можете приобрести промышленные частотные преобразователи Omron, Yaskawa, Schneider Electric по привлекательным ценам в нашем интернет-магазине. Мы работаем напрямую с производителями оборудования, поэтому гарантируем высокое качество, оперативную доставку, сервисную поддержку и доступные цены.
Мы также являемся сертифицированным сервисным центром по преобразователям частоты компании Omron.
Подключение частотного преобразователя к электродвигателю
Частотные преобразователи, представленные в нашем каталоге, дают уникальные возможности по организации управления и защиты систем на базе трехфазных двигателей различной мощности. При этом, в зависимости от задачи и модели частотника, можно просто запитать двигатель как от однофазного, так и от трехфазного напряжения 220 и 380 В и выше соответственно.
В основе работы таких частотников лежит инверторный принцип преобразование входного напряжения в выходное с возможностью регулировки частоты:
- Вручную;
- По заданной программе;
- От пульта;
- С помощью системы автоматизированного управления.
Для оптимального решения задачи нужно не только грамотно выбрать устройство управления, но и обеспечить правильное подключение двигателя к частотному преобразователю.
Поэтому, если у вас нет опыта в создании таких систем, обратитесь за консультацией по выбору оптимальной модели оборудования и особенностях подключения двигателя к частотнику к нашим специалистам.
Общие требования к организации подключения
Вне зависимости от назначения системы, ее мощности, решаемых задач и автоматики управления, подключение частотника к электродвигателю должно выполняться с соблюдением общих норм электробезопасности, которые предусмотрены при эксплуатации электрооборудования в низковольтных сетях бытового и промышленного назначения.
Несмотря на то, что современные частоткик имеет свои цепи защиты, следует понимать, что какой бы вы ни выбрали частотный преобразователь, подключение к двигателю в общем случае требует соблюдения следующих условий:
- Установка входного автоматического выключателя, число полюсов которого соответствует числу фаз сети. При подключении к трехфазной сети защитный автомат должен быть оборудован единым рычагом одновременного отключения всех фаз. Автомат ставиться в начале цепи питания системы.
- Установка пускателя, при помощи которого напряжение подается на частотный преобразователь.

- Подключение питания на вход частотника в соответствии с паспортной документацией.
- Подключение двигателя к преобразователю частоты с соблюдением маркировки.
Естественно, требуется обеспечить заземление всех цепей и подобрать провода, сечение которых рассчитано в соответствии с мощностью подключенной нагрузки. В ряде случаев цепь питания может быть дополнена фильтрами электромагнитных помех и сетевым дросселем.
Подключение двигателя к частотному преобразователю
Подключение электродвигателя к частотному преобразователю может выполнятся как непосредственно к соответствующим клеммам на выходной колодке частотника, так и через установленную дополнительную трехфазную розетку. Второй способ является более универсальным, однако конкретное решение зависит от типа системы и ее особенностей. Также следует проверить тип соединения обмоток трехфазного двигателя и при необходимости перекоммутировать их в соответствии с документацией на преобразователь.
При необходимости также подключается выносной пульт управления преобразователем.
Далее следует выполнить первичную настройку режимов работы частотника в соответствии с паспортом и учетом особенности работы двигателя в системе, установить параметры срабатывания защитной автоматики в зависимости от типа и мощности двигателя по инструкции к выбранной модели преобразователя.
После этого следует еще раз проверить правильность коммутации и провести пробный пуск системы в ручном режиме. Если все собрано верно и двигатель работает и управляется в ручном режиме, можно приступать к программированию работы преобразователя с помощью его пульта управления либо через компьютер, подключенный к стандартному порту.
По любым вопросам, связанным с выбором оптимальной модели частотного преобразователя, его подключением и настройкой обращайтесь к нашим специалистам.
вернуться в блог
Частотное регулирование однофазного асинхронного двигателя
Частотное управление электроприводами активно развивается и все чаще можно услышать о новом методе управления, или улучшенном частотнике, или о внедрении частотного электропривода в какой-то сфере, где ранее никто и подумать не мог что это возможно. Но это факт!
Но это факт!
Если мы внимательно рассмотрим электродвигатели, к которым применяют частотное регулирование – то это асинхронные или синхронные трехфазные двигатели. Существует несколько разновидностей преобразователей частоты. Но ведь есть и однофазные асинхронные машины, почему прогресс не касается их? Почему частотное управление не применяют так активно к однофазным машинам? Давайте рассмотрим.
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 1200, на статор наматывают еще и пусковую П, которая имеет фазную зону 600. Также пусковая обмотка сдвигается относительно рабочей на 900 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 900 электрических и имеют фазные зоны тоже 900. При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Частотное регулирование однофазных асинхронных электродвигателей
Итак, все чаще появляются предложения частотных преобразователей, которые могут управлять однофазными асинхронными машинами. В силу того что частотники предназначены для работы с трехфазными машинами, то для регулирования оборотов однофазной машинами необходим особый вид частотного преобразователя. Это обусловлено тем, что трехфазные и однофазные машины имеют немного разный принцип работы. Давайте рассмотрим схему включения, которую предоставляет один из официальных производителей частотных преобразователей для однофазных машин:
Это схема прямого подключения. Где: Ф-фаза питающего напряжения, N-нейтральный проводник, L1, L2 – обмотки двигателя, Ср – рабочий конденсатор.
А вот схема подключения преобразователя:
Как мы можем видеть, конденсатор при включении данной схемы отключается. Обмотка L1 переключается к выходу преобразователя фазы А, а L2 к В. Общий провод подключается к выходу С. Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение.
Данный способ частотного регулирования трудно назвать однофазным, так как при питания двигателя от сети напрямую необходимо опять восстанавливать схему с конденсатором. Более того, этот способ регулирования частоты НЕ ПОДХОДИТ для машин с пусковой обмоткой, так как сопротивление рабочей и пусковой обмотки не равны, появится асимметрия.
Можем сделать вывод, что данный вид частотного регулирования подходит не всем электродвигателям, а только конденсаторным. Более того, при такой схеме подключения необходимо провести переподключение обмоток внутри электродвигателя (в коробке выводов электродвигателя), что после переподключения не позволит работать ему от сети напрямую. Поэтому если вы собираетесь питать электродвигатель от однофазной сети через частотник, то, может быть стоит купить преобразователь, который питается от однофазной сети, а двигатель обычный, трехфазный. Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.
Методы управления преобразователем частоты.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
1. Скалярное
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
2. Векторное
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.
Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
|
Метод управления |
Диапазон управления скоростью |
Погрешность скорости3, % |
Время нарастания момента, мс |
Пусковой момент |
Цена |
Описание |
||
|
Скалярный |
1:101 |
5-10 | ||||||
Частотный преобразователь для насоса: скважинный, циркуляционный
СодержаниеНасосы, используемые в системах автономного водоснабжения и отопления, являются производительным, но при этом достаточно затратным в эксплуатационном плане оборудованием из-за высокого уровня энергопотребления. Уменьшить затраты и существенно продлить срок эксплуатации насоса можно укомплектовав его частотным преобразователем, о котором мы поговорим в данной статье.
Частотный преобразователь
Вы узнаете, зачем нужен и какие функции выполняет частотный преобразователь. Будет рассмотрен принцип работы таких устройство, их разновидности, технические характеристики и приведены рекомендации по выбору преобразователей для скважинных и циркуляционных насосов.
Зачем нужен частотный преобразователь?
Практически все современные насосы, реализующиеся в бюджетной и средней ценовой категории, спроектированы по принципу дросселирования. Электромотор таких агрегатов всегда работает на максимальной мощности, а изменение расхода/давления подачи жидкости осуществляется посредством регулировки запорной арматуры, которая меняет сечение пропускного отверстия.
Такой принцип работы имеет ряд существенных недостатков, он провоцирует появление гидравлических ударов, так как сразу же после включения насос начинает качать воду по трубам на максимальной мощности. Также проблемой является высокое энергопотребление и быстрый износ компонентов системы — как насоса, так и запорной арматуры с трубопроводом. Да и о точной настройке такой системы водоснабжения дома из скважины речи быть не может.
Вышеописанные недостатки несвойственны насосам, оснащенным частотным преобразователем. Данный элемент позволяет эффективно управлять давлением, создаваемым в трубопроводе водоснабжения либо отопления, с помощью изменения величины поступающей на мотор электроэнергии.
Схема работы насоса в разных режимах
Как можно увидеть на схеме, насосное оборудование всегда рассчитывается по параметру предельной мощности, однако в режиме максимальной нагрузки насос работает лишь в периоды пикового потребления воды, что бывает крайне редко. Во всех остальных случаях повышенная мощность оборудования является излишней. Частотный преобразователь, как показывает статистика, позволяет экономить до 30-40% электроэнергии при работе циркуляционных и скважинных насосов.
к меню ↑
Устройство и алгоритм работы
Частотный преобразователь для насосов водоснабжения является электротехническим прибором, который преобразует постоянное напряжение электросети в переменное по предварительно заданной амплитуде и частоте. Практически все современные преобразователи выполнены по схеме двойного изменения тока. Такая конструкция состоит из 3-ех основных частей:
- неуправляемый выпрямитель;
- импульсный инвертор;
- система управления.
Ключевым элементом конструкции является импульсный инвертор, который в свою очередь состоит из 5-8 ключей-транзисторов. К каждому из ключей подключается соответствующий элемент обмотки статора электромотора. В зарубежных преобразователях используются транзисторы класса IGBT, в российских — их отечественные аналоги.
Система управления представлена микропроцессором, который параллельно выполняет функции защиты (отключает насос при сильных колебаниях тока в электросети) и контроля. В скважинных насосах для воды управляющий элемент преобразователя подключается к реле давления, что позволяет функционировать насосной станции в полностью автоматическом режиме.
Экономия электроэнергии при использовании ЧП
Алгоритм работы частотного преобразователя достаточно прост. Когда реле давления определяет, что уровень давления в гидробаке упал ниже допустимого минимума, передается сигнал на преобразователь и тот запускает электромотор насоса. Движок разгоняется плавно, что снижает воздействующие на систему гидравлические нагрузки. Современные преобразователи позволяют пользователю самостоятельно устанавливать время разгона электродвигателя в пределах 5-30 секунд.
В процессе разгона датчик сигнала непрерывно передает на преобразователь данные о уровне давления в трубопроводе. После того, как оно достигает требуемой величины, блок управления останавливает разгон и поддерживает заданную частоту оборотов мотора. Если подключенная к насосной станции точка водопотребления начнет расходовать больше воды, преобразователь увеличит давление подачи путем повышения производительности насоса, и наоборот.
к меню ↑
Как работает насос в паре с частотным преобразователем? (видео)
к меню ↑
Рекомендации по выбору и установке оборудования
Если используемый вами насос не обладает встроенным частотным преобразователем, то приобрести и установить такой регулятор мощности можно самостоятельно. Как правило производители насосов в техническом паспорте указывают, какой конкретно преобразователь подойдет к данном модели оборудования.
Если же рекомендаций нету, и выбор прибора полностью лег на ваши плечи, руководствуйтесь следующими критериями:
- Мощность — преобразователь напряжения всегда подбирается исходя из мощности электропривода, к которому он подключается.
- Входное напряжения — указывает на силу тока, при которой преобразователь остается работоспособным. Тут необходимо выбирать с оглядкой на колебания, которые могут быть в вашей электросети (пониженное напряжение приводит к остановке прибора, при повышенном он может попросту выйти из строя). Также учитывайте тип двигателя насоса — трех, двух или однофазный.
- Диапазон частот регулировки — для скважинных насосов оптимальным будет диапазон 200-600 Гц (зависит от изначальной мощности насоса), для циркуляционных 200-350 Гц.
- Количество ходов и выходов управления — чем их больше, тем больше команд и, как следствие, режимов работы преобразователя в сможете настроить. Автоматика позволяет задать скорость оборотов при пуске, несколько режимов максимальных оборотов, темпы разгона и т.д.
- Способ управления — для скважинной насосной станции удобнее всего будет выносное управление, которое можно расположить внутри дома, тогда как для циркуляционных насосов отлично подойдет преобразователь с пультом ДУ.
Циркуляционный насос Грундфос с частотным преобразователем
Если вы отсеяли все представленные на рынке приборы и столкнулись с тем, что подходящего по характеристикам оборудования попросту нет, необходимо сузить критерии выбора до ключевого фактора — потребляемого двигателем тока, по которому подбирается номинальная мощность преобразователя.
Также выбирая блок управления частотой, особенно от отечественных либо китайских производителей, учитывайте срок гарантийного обслуживания. По его продолжительности можно косвенно судить о надежности техники.
Пару слов о производителях. Ведущей компанией в данной сфере является фирма Grundfoss (Дания), которая поставляет на рынок свыше 15 различных моделей преобразователей. Так, для насосов с трехфазным электродвигателем подойдут модель Micro Drive FC101, для однофазных (работающих от стандартной электросети 220В) — FC51.
PowerFlex 40
Более доступным в ценовом плане является оборудование компании Rockwell Automation (Германия). Фирма предлагаем линейку преобразователей PowerFlex 4 и 40 для маломощных циркуляционных насосов и серию PowerFlex 400 для скважинных насосных станций (от одного преобразователя могут работать сразу 3 параллельно подключенных насоса.
Учитывайте, что цена хорошего преобразователя подчас может доходить до стоимости насоса, поэтому подключение и настройка такого прибора должна выполняться исключительно специалистами.Главная страница » Насосы
Wiki — Преобразователь частоты
Ответ прост: масса и объем. Более высокая частота означает уменьшение количества материала (и, следовательно, объема / массы) трансформаторов и вращающихся машин.Практический предел составляет около 400 Гц — намного выше, а магнитные компоненты становятся довольно загадочными, чтобы минимизировать потери. У них также начнутся проблемы с первичными двигателями и / или помехами в диапазонах VHF / UHF для целей связи.
В небольшой системе, такой как самолет, приоритет отдается уменьшению веса системы, поэтому более высокая частота, например, 400 Гц (ограничена потерями). Удельная мощность машины может быть увеличена либо за счет увеличения крутящего момента / скорости, но для увеличения крутящего момента требуется больший объем … поэтому генераторы с турбинным приводом в аэрокосмической отрасли всегда работают со скоростью несколько килограмм в минуту.
Насколько мне известно, снижение пускового тока за счет изменения конструкции трансформатора (низкая магнитная индукция или повышенное сопротивление) незначительно.Полное сопротивление утечки в% не снижает бросок тока, а снижает только индуктивность воздушного сердечника обмотки под напряжением. Пусковой ток = (пик фазного напряжения / импеданса, состоящий из индуктивности воздушного сердечника + сопротивления обмотки) x фактор, основанный на плотности потока. Это мой почти полувековой опыт работы проектировщиком трансформаторов. В классических трансформаторах (см. Стр. 37 Transformer Engineering — LF Blume of GE, 1951), где обсуждаются меры по снижению пускового тока, никогда не предлагается вышеуказанный тип конструктивных изменений в качестве решения.В таких текстах упоминается предварительная зарядка и т. Д., Но сегодня управляемое переключение является принятым решением для снижения пусковых токов.Немного о современных силовых трансформаторах в сравнении с трансформаторами 30-40 лет назад. Это может противоречить записям в старых учебниках по трансформаторам.
Все крупные системы электроснабжения (размером с города-электросети) должны иметь реле частоты и напряжения для снижения нагрузки, когда система начинает колебаться (когда генерация и нагрузка не сбалансированы).Это делается для попытки согласования нагрузки и генерации. Я живу на западе США, я видел крупномасштабные падения нагрузки (большие части городов, влияющие на миллионы клиентов) из-за крупных отключений линий электропередачи, которые вызвали несоответствие генерации и нагрузки, вызывая колебания напряжения и частоты, которые, в свою очередь, отключили нагрузки (реле повышенной и пониженной частоты и напряжения). Это крупномасштабное падение нагрузки (при разных частотах и напряжениях, выполняемое поэтапно), наконец, привело к согласованию генерации с нагрузками и стабилизации системы.В зависимости от размера вашей системы, ступени реле частоты и напряжения, подключенные к большинству распределительных цепей, могут помочь предотвратить полный крах вашей системы электроснабжения.Входная схема большинства статических преобразователей частоты представляет собой трехфазный диодный выпрямительный мост с конденсаторным фильтром. Входной ток такой схемы состоит на каждой входной фазе из импульсов тока, которые заряжают накопительный конденсатор, как показано на следующем рисунке.Таким образом, входной ток представляет собой искаженную форму волны тока с основной составляющей на частоте питания, но со значительным содержанием гармоник.
Потребляемый входной ток по существу не зависит от выходной частоты преобразователя, поскольку мгновенная мощность, потребляемая статическим преобразователем частоты, является постоянной, и поэтому ток, требуемый от входа для зарядки конденсатора на шине постоянного тока, является постоянным.
Обратите внимание на внутренние компоненты преобразователя частоты, находящиеся под высоким напряжением. Только квалифицированные электрики могут обслуживать преобразователь частоты и устранять неисправности.Выключите преобразователь частоты, прежде чем приступить к процедурам поиска и устранения неисправностей, если устранение неисправностей в реальном времени не требуется. Преобразователи частотыГГц не требуют ежедневного обслуживания, но регулярное обслуживание имеет больший срок службы, а время обслуживания соответствует условиям окружающей среды.
Профилактические меры:
- Не ставьте жидкие предметы на верхнюю часть преобразователя частоты.
- Если преобразователь частоты установлен в суровых условиях, например, при ветре и пыли, уделяйте больше внимания чистоте преобразователя частоты или выполняйте более частое техническое обслуживание.
Экономия энергии, которая может быть значительной, — это не единственное преимущество установки преобразователей частоты, это также дополнительная экономия, реализованная за счет снижения износа оборудования.Эта экономия, также значительная, не принимается во внимание в период окупаемости, описанный выше.
Для вентиляторов посмотрите на кривую вентилятора. При изменении с 50 Гц на 60 Гц скорость вращения вентилятора увеличивается, и для этого требуется больше мощности, чем может обеспечить двигатель. Это вполне может подтолкнуть вентилятор к перегрузке.Вентиляторы обычно имеют размер, очень близкий к доступной мощности двигателя, и имеют небольшой запас прочности. Многим приходится переходить на вентилятор с меньшим шагом, чтобы работать на более высокой скорости. Достаточно просто сделать заранее, но не так, если вы узнаете о перегорании двигателя.
Для небольших хобби-приложений или основных сельскохозяйственных требований, когда вы просто хотите получить небольшой трехфазный источник питания для токарного станка, дрели, приводного ремня и т. Д., Существует базовое устройство, называемое статическим преобразователем частоты.Если вы посмотрите это в Google, вы получите много просмотров. Попробуйте поискать изображения в Google, и вы увидите, что происходит внутри. Вам необходимо знать мощность или номинальную мощность двигателя, чтобы определить правильные конденсаторы. Это низкая стоимость и простота. Это может привести к небольшому нагреву двигателя из-за плохой балансировки фаз и ограничению мощности, которую вы можете получить от двигателя. На рынке представлено множество недорогих устройств.Для более крупных приложений вам, вероятно, потребуется использовать линейку вращающихся преобразователей (где однофазный двигатель управляет трехфазным генератором) или более сложную конструкцию инвертора, использующую тиристоры и сложную электронику.Очевидно, что они будут иметь возрастающую сложность и связанные с этим затраты.
Преобразователь частоты может быть отличным способом сэкономить деньги для вашего бизнеса, связанного с двигателями. Если на ваших предприятиях много асинхронных двигателей или используются двигатели более старого типа, преобразователь частоты может повысить эффективность ваших предприятий и сэкономить для вас деньги.Использование преобразователей частоты для регулирования скорости таких устройств, как насосы, вентиляторы и компрессоры, не является новшеством.Однако новые технологии в этих устройствах снизили их стоимость, что сделало их более привлекательными для самых разных применений. Существует большой потенциал для экономии энергии за счет использования большего количества регуляторов частоты для асинхронных двигателей.
Статический преобразователь частоты означает, что внутри него нет вращающихся частей — также называемый твердотельным — определение относится к преобразователю частоты вращения, который использует электродвигатель для вывода регулируемой частоты.Статический преобразователь частоты преобразует фиксированную мощность сети через переменный ток в постоянный в переменный с помощью внутренних электронных частей и компонентов, многофункциональный инвертор преобразует сеть (50 Гц или 60 Гц, 120 В, 240 В, 400 В) через схему преобразования и преобразует ее в требуемую источник питания напряжения и частоты, выходной источник питания может имитировать международные стандарты энергосистемы. Введите одно- или трехфазное питание переменного тока, преобразуйте переменный ток в постоянный, постоянный в переменный, на выходе будет стабильная чистая синусоида, а также можно выдавать 400 Гц в авиастроении.
Преобразователи частоты | Статья о преобразователях частоты по The Free Dictionary
(1) В электротехнике — устройство для изменения частоты напряжения или тока. Применяется в системах питания регулируемых электроприводов и магнитных усилителей. Другие его применения включают согласование двух или более систем переменного тока с разными частотами. Преобразователи частоты можно разделить на статические, вращающиеся и комбинированные. Статические преобразователи частоты можно разделить на электромагнитные и выпрямительные.
Принцип действия электромагнитных преобразователей частоты основан на изменении формы синусоидального переменного напряжения с помощью магнитных нелинейных элементов, таких как дроссели и трансформаторы с насыщаемыми сердечниками, и последующего выделения составляющей напряжения с необходимой частотой. Электромагнитные преобразователи частоты используются как делители частоты и умножители частоты; их эффективность составляет от 70 до 80 процентов.
Транзисторы и тиристоры обычно используются в качестве выпрямителей в преобразователях выпрямительного типа, где они заменили тиратроны и ртутные дуговые лампы.Статические преобразователи частоты транзисторного типа используются в основном в радиотехнической аппаратуре; их номинальная мощность может достигать 2–3 киловольт-ампер (кВА). Статические преобразователи частоты тиристорного типа бывают трех видов: с прямой связью, с промежуточной ступенью постоянного тока и с промежуточной ступенью переменного тока на повышенной частоте.
Статические преобразователи частоты с прямой связью (к этому классу можно отнести выпрямители тока) используются в мощных промышленных электроприводах переменного тока, в электроприводах переменного тока автономных энергосистем с генераторами, работающими на повышенной мощности. частоты, а также в оборудовании централизованных систем электроснабжения пассажирских поездов.КПД таких преобразователей частоты достигает 95–98 процентов.
Преобразователь частоты с промежуточным звеном постоянного тока — это двухступенчатый преобразователь частоты; выпрямитель встроен во входной каскад, а инверторный блок предусмотрен в выходной каскад. Такие статические преобразователи частоты используются в промышленных и тяговых электроприводах переменного тока, где требуется плавное регулирование частоты и напряжения; их номинальная мощность может достигать от 3 до 5 мегавольт-ампер. Их КПД несколько ниже, чем у преобразователей частоты с прямой связью.
Статические преобразователи частоты с промежуточным каскадом переменного тока, работающие на частоте выше частоты источника питания, используются менее широко. У них есть инвертор, встроенный во входной каскад. Выходной каскад включает статический преобразователь частоты с прямой связью. К промежуточным шинам можно подключать нагрузки, работающие с повышенной частотой. КПД этого типа ниже, чем у преобразователей частоты с промежуточным каскадом постоянного тока.
Ротационные преобразователи частоты могут быть выполнены как две машины или как одна машина.Двухмашинный тип обычно сочетает в себе приводной электродвигатель и генератор переменного или постоянного тока. В автономных энергосистемах используются двухмашинные преобразователи частоты с синхронным генератором, обеспечивающим ток на частотах от 50 до 400 Гц. Их КПД может достигать 85 процентов, а номинальная мощность колеблется от 30 до 800 кВА. Преобразователи частоты вращения также могут быть построены как единая электрическая машина с общим якорем.
СПИСОК ЛИТЕРАТУРЫ
Bamdas, A.М., Кулинич В.А., Шапиро С.В. Статические электромагнитные преобразователи частоты и числа фаз , Москва-Ленинград, 1961.Каганов И.Л. Промышленная электроника . Москва, 1968.
Костенко М.П., Пиотровский Л.М. Электрические машины , 3-е изд., Часть 2. Ленинград, 1973.
(2) В радиотехнике — схема в супергетеродинном приемнике, которая изменяет или преобразует частоту приходящих колебаний в промежуточную частоту, которая обычно ниже входящей частоты.Часто называемый преобразователем частоты, он состоит из смесителя частоты и гетеродина (гетеродина) с транзисторными компонентами или из одной трубки преобразователя. В широком смысле термин «преобразователь частоты» часто обозначает другие радиотехнические устройства, связанные с преобразованием частоты, такие как синтезаторы частоты, делители частоты и умножители частоты.
Большая Советская Энциклопедия, 3-е издание (1970-1979). © 2010 The Gale Group, Inc. Все права защищены.
преобразователь частоты — перевод на немецкий — примеры английский
Эти примеры могут содержать грубые слова на основании вашего поиска.
Эти примеры могут содержать разговорные слова, основанные на вашем поиске.
Наш открывалка с преобразователем частоты для однофазной сети 230 В.
Все насосы оптимизированы для работы с электродвигателями с регулируемой частотой вращения и / или дизельными двигателями, но, конечно, они также могут работать без преобразователя частоты .
Alle Pumpen sind optimiert für den Betrieb mit drehzahlgeregelten Elektro- beziehungsweise Dieselmotoren, können aber natürlich auch ohne Frequenzumrichter betrieben werden.Способ и устройство защиты преобразователя частоты
Зарядка конденсатора фильтра в промежуточной цепи преобразователя частоты
Устройство управления тормозным резистором преобразователь частоты
Grundfos обеспечивает энергопотребление всего 7 Вт с саморегулирующимся циркуляционным насосом Alpha Pro благодаря преимуществам преобразователя частоты , нового компактного статора и двигателя с постоянными магнитами.
Bei der selbstregelnde Heizungsumwälzpumpe Alpha Pro erreicht Grundfos eine Energieaufnahme von nur 7 Watt durch die kombinierten Vorteile eines Frequenzumrichters , eines neuen kompakten Stators und der Verwendungmotor von Perrovendungmotor.Управление одинаково столь же переменное: лебедка может поставляться как с , так и без преобразователя частоты и, в зависимости от требований, управляться централизованно или локально.
Ebenso variabel ist die Steuerung: Die Winde kann sowohl mit als auch ohne Frequenzumrichter geliefert und je nach Bedarf zentral oder dezentral angesteuert werden.Отдельные компоненты систем обратного охлаждения могут быть адаптированы к погодным условиям соответствующего сезона с помощью преобразователя частоты .
Mit Hilfe eines Frequenzumrichters könnten einzelne Komponenten der Rückkühlanlagen auf die Wetterlage der jeweiligen Jahreszeit abgestimmt werden.Устройство управления по п.1 или 2, отличающееся тем, что оно предназначено для управления устройством (11) регулирования скорости вращения, разработанным для двигателя переменного тока, в частности преобразователем частоты .
Steuereinrichtung nach Anspruch 1 или 2, dadurch gekennzeichnet, dass sie zur Steuerung eines für einen Wechselstrommotor ausgelegten Drehzahlstellers (11), insbesondere eines Frequenzumrichters , ausgelegt ist.Порядок и устройство для торможения двигателя лифта с короткозамкнутым ротором, питаемого от преобразователя частоты в аварийных ситуациях.
Verfahren und Gerät zur Bremsung eines Kurzschlussläufer-Aufzugsmotors bei Störungsfällen, gespeist von einem Frequenzwandler .Процедура и устройство для измерения токов в преобразователе частоты .
Блок управления трехфазным двигателем переменного тока, питаемый от преобразователя частоты .
Устройство для коррекции переменного напряжения, подаваемого преобразователем частоты , питающим асинхронный или синхронный двигатель.
Einrichtung zur Korrektur der von einem Frequenzwandler gelieferten Wechselspannung zur Speisung eines Асинхронные синхронные двигатели.Применение преобразователя частоты по п.10 в портативном телефоне.
Схема для анализа электрического сигнала с амплитудной модуляцией, содержащая преобразователь частоты .
Для создания колебаний с разной частотой компрессор оснащен преобразователем частоты .
Um Schwingungen in unterschiedlichen Frequenzen zu erzeugen, ist der Kolbenverdichter mit einem Frequenzumrichter ausgestattet.Система оснащена мотор-редуктором с тормозом, управляемым преобразователем частоты .
Это стало возможным благодаря профилактическому обслуживанию, включая сеть онлайн-диагностики (ODiN) и и преобразователь частоты от Rexroth.
Профилактическое обслуживание с помощью сети онлайн-диагностики (ODiN) и и Frequenzumrichter von Rexroth haben beides möglich gemacht.Скорость вращения регулируется бесступенчато, поэтому преобразователь частоты не нужен.
Привод шаровой мельницы оснащен частотным преобразователем .
3 Объяснение схем преобразователя частоты в напряжение
Как следует из названия, преобразователи частоты в напряжение — это устройства, которые преобразуют входную переменную частоту в соответствующие уровни выходного напряжения.
Здесь мы изучаем три простых, но продвинутых проекта с использованием IC 4151, IC VFC32 и IC LM2907.
1) Использование IC 4151
Эта схема преобразователя напряжения частоты, использующая IC 4151, характеризуется высокой степенью линейности преобразования.При указанных значениях частей коэффициент преобразования схемы может быть около 1 В / кГц.
Когда на входе используется напряжение постоянного тока с частотой 0 Гц, на выходе генерируется соответствующее напряжение 0 В. Коэффициент преобразования на выходе никогда не зависит от рабочего цикла входной среднеквадратичной частоты.
Но, если на входе применяется частота синусоидальной волны, в этой ситуации сигнал должен быть пропущен через триггер Шмитта перед подачей его на вход IC 4151.
Если вас интересует другой коэффициент преобразования, вы можете рассчитать его по следующей формуле:
В (выход) / f (вход) = R3 x R7 x C2 / 0,486 (R4 + P1) x [В / Гц ]
T1 = 1,1 x R3 x C2
Схема может быть даже подключена к выходу преобразователя напряжения в частоту и использоваться в качестве способа передачи сигналов постоянного тока через удлиненное кабельное соединение без проблем, связанных с сопротивлением кабеля, ослабляющим сигнал.
2) Использование конфигурации VFC32
В предыдущем посте объяснялась простая однокристальная схема преобразователя напряжения в частоту с использованием микросхемы VFC32, здесь мы узнаем, как ту же микросхему можно использовать для достижения частоты, противоположной схеме преобразователя напряжения.
На рисунке ниже изображена другая стандартная конфигурация VFC32, которая позволяет ему работать как схема преобразователя частоты в напряжение.
Входной каскад, образованный емкостной цепью C3, R6 и R7, обеспечивает совместимость входа компаратора со всеми логическими триггерами 5 В. Компаратор, в свою очередь, переключает соответствующий однократный каскад на каждом спадающем фронте подаваемых входных импульсов частоты.
Принципиальная схема
Входное пороговое задание для компаратора детектора составляет около –0.7В. В случае, когда входные частоты может быть ниже, чем 5 В, потенциал делитель R6 / R7, может быть соответствующим образом скорректированы для изменения опорного уровня и для обеспечения надлежащего обнаружения входов низких частот уровня на операционных усилителях.
Как показано на графике в предыдущей статье, значение C1 может быть выбрано в зависимости от полного диапазона триггеров частотного входа.
C2 отвечает за фильтрацию и сглаживание формы волны выходного напряжения, большие значения C2 помогают добиться лучшего контроля над пульсациями напряжения на сгенерированном выходе, но отклик медленный на быстро изменяющиеся входные частоты, тогда как меньшие значения C2 вызывают плохую фильтрацию но предлагают быстрый отклик и настройку с быстро меняющимися входными частотами.
ЗначениеR1 можно настроить для достижения настраиваемого диапазона выходного напряжения полного отклонения относительно заданного диапазона входной частоты полной шкалы.
Как работает схема преобразователя частоты в напряжение
Основная работа предлагаемой схемы преобразователя частоты в напряжение основана на теории заряда и баланса. Частота входного сигнала рассчитывается так, чтобы соответствовать выражению V) (in) / R1, и это значение обрабатывается соответствующим операционным усилителем IC посредством интегрирования с помощью C2.Результат этого интегрирования приводит к падающему выходному напряжению интегрирования рампы.
Пока происходит вышеупомянутое, срабатывает последующий каскад однократного включения, соединяя опорный ток 1 мА со входом интегратора в ходе одноразового режима.
Это, в свою очередь, переворачивает характеристику линейного изменения выходного сигнала и заставляет его подниматься вверх, это продолжается, пока включен однократный режим, и как только его период истекает, линейное изменение снова вынуждено изменить свое направление и заставляет вернуться к нисходящий падающий узор.
Расчет частоты
Вышеупомянутый процесс колебательного отклика обеспечивает устойчивый баланс заряда (среднего тока) между током входного сигнала и опорным током, который решается с помощью следующего уравнения:
I (дюйм) = IR (средн. )
В (вход) / R1 = fo tos
(1 мА)
Где fo — частота на выходе, t — период однократного импульса = 7500 C1 (Frarads)
Значения R1 и C1 выбраны соответствующим образом, чтобы в результате рабочий цикл составляет 25% в полном диапазоне выходной частоты.Для FSD, который может быть выше 200 кГц, рекомендуемые значения будут генерировать около 50% рабочего цикла.
Советы по применению:
Наилучшей областью применения для описанной выше схемы преобразователя частоты в напряжение является то, где требование требует преобразования данных частоты в данные напряжения.
Например, эту схему можно использовать в тахометрах, а также для измерения скоростей двигателей в диапазонах напряжения.
Таким образом, эту схему можно использовать для изготовления простых спидометров для двухколесных транспортных средств, включая велосипеды и т. Д.
Обсуждаемая ИС может также использоваться для создания простых, недорогих, но точных частотомеров в домашних условиях, используя вольтметры для считывания выходного преобразования.
3) Использование IC LM2917
Это еще одна отличная серия IC, которая может быть
принцип работы. Преобразователь частоты высоковольтный
Преобразователи частоты — это устройства, которые могут изменять частоту электрического тока. Эти устройства чаще всего подключаются к асинхронным двигателям.Их основная задача — регулировать их мощность. В зависимости от конструктивных особенностей различают одноступенчатые и двухступенчатые преобразователи.
Также устройства разделены по способу управления. В частности, существуют скалярные и векторные модификации. Чтобы разобраться в устройствах более подробно, следует рассмотреть стандартную схему преобразователя.
Схема преобразователя
Обычный преобразователь частоты 220–380 В состоит из реле, а также модулятора для изменения тактовой частоты.Резисторы в устройствах чаще всего используются селективного типа. Также важно отметить, что модели оснащены трансиверами. Есть контакты для подключения устройства. Регуляторы чаще всего устанавливаются на блок управления. В некоторых модификациях используется расширитель. Также следует отметить, что для безопасной эксплуатации устройства устанавливаются различные типы изоляторов.
Одноступенчатые модификации
Тетроды устанавливаются на каждый одноступенчатый преобразователь частоты.Принцип работы моделей основан на изменении фазовой частоты. В первую очередь на реле будет падать напряжение. Затем ток пропускается через трансивер. Для снижения чувствительности используются тиристоры. Сразу же в модуляторах происходит процесс преобразования.
Также важно отметить, что в некоторых моделях есть фильтры. Они помогают справиться с электромагнитными помехами. Используются одноступенчатые преобразователи, обычно для компрессоров. В некоторых случаях их устанавливают на насосы.Номинальное напряжение устройства поддерживается на уровне 220 В. Рабочий ток в среднем 3А. Точность стабилизации скорости у моделей разная. Ошибка преобразователя частоты чаще всего возникает из-за перегрузки в сети.
Двухступенчатые модели
Триггеры устанавливаются только на двухступенчатый преобразователь частоты. Принцип работы моделей основан на изменении фазовой частоты в цепи. В отличие от предыдущего типа преобразование тока начинается в тиристорном блоке.Перед этим проводится процесс ректификации. На этом этапе предельная частота снижается до уровня 45 Гц.
Номинальное напряжение устройства поддерживается в320 В. В свою очередь показатель рабочего тока не превышает 5А. У некоторых модификаций резисторы селективного типа. Модуляторы в этом случае устанавливаются с регуляторами. Прямое подключение преобразователей осуществляется через контакты на задней панели. Применяются двухступенчатые устройства для различных станков и приводов.
Низковольтные модификации
Низковольтные модели изготовлены на основе диодных выпрямителей. Как правило, устройства делают компактными, а номинальное напряжение не превышает 120 В. Параметр рабочего тока варьируется в районе 2 А. Для мощных асинхронных двигателей эти устройства не подходят. Чаще всего их используют на компрессорах. Тетроды в этом случае выпускаются с изоляторами.
В некоторых моделях установлены фильтры. Регуляторы используются с усилителем или без него.Также важно отметить, что существуют модификации с резонансными резисторами. Номинальный параметр входного напряжения составляет в среднем 130 В. Однако токовые перегрузки системы небольшие.
Высоковольтные модификации
Высоковольтный преобразователь частоты Применяется для асинхронных двигателей мощностью 10 кВт и более. Выпрямители во многих устройствах устанавливаются с тиристорным блоком. Резисторы чаще всего используются селективного типа. На сегодняшний день можно встретить высоковольтный преобразователь частоты с двумя реле.Curre
Дизайндля контроллера двигателя в гибридном электромобиле на основе технологии векторного преобразования частоты
Двигатель и технология его управления являются одними из основных компонентов гибридного электромобиля (HEV). Чтобы соответствовать быстрому отклику крутящего момента HEV, рассматривается алгоритм векторного управления, основанный на ориентированной на поток ротора и имитационной модели, а в документе представлены модульные конструкции для аппаратного и программного обеспечения контроллера с целью создания платформы для достижения векторного управления асинхронным асинхронным двигателем.Проанализировать электромагнитную совместимость контроллера, принять соответствующие меры защиты от помех для обеспечения нормальной работы электромагнитных чувствительных устройств, таких как шина CAN; Эксперимент доказывает, что мера практична и осуществима. На основе правильной логики управления, такой как повышение надежности связи по шине CAN, обеспечение последовательности включения питания и устранение неисправностей, проведение лабораторных экспериментов с двигателем, проверка его статических свойств и настройка параметров контроллера.Результаты экспериментов показывают, что разработанная система привода обладает характеристиками низкой скорости и высокого крутящего момента, широкого диапазона переменной скорости и высокой комплексной эффективности.
1. Введение
Гибридный электромобиль (HEV) — это транспортное средство с двумя или более источниками питания (один из них — электрическая энергия) [1, 2], например блок двигателя внутреннего сгорания и вторичный элемент или блок топлива. ячейка и вторичная ячейка. В настоящее время развитие исследований HEV является одним из наиболее эффективных способов решения проблем загрязнения окружающей среды и энергии.
Приводной двигатель — один из основных компонентов HEV. В соответствии с условиями эксплуатации различных транспортных средств, такими как ровная дорога, съезд, ускорение-замедление, старт-стоп и т. Д., Режим работы двигателя часто переключается между частичной нагрузкой, большой нагрузкой и избыточной нагрузкой, тем самым повышая общую эффективность двигателя. Электродвигатель является ключевым вопросом при разработке двигателя и его контроллера, который напрямую влияет на мощность транспортного средства, экономию топлива и выбросы.Основные требования к производительности системы привода двигателя HEV [3, 4]: высокая производительность и низкие потери, высокая удельная мощность, низкая скорость и высокий крутящий момент, широкий диапазон переменной скорости, высокая перегрузочная способность, хорошая надежность и т. Д. . Основываясь на анализе основных систем приводов двигателей HEV на современном рынке, в данной статье в качестве приводного двигателя выбирается асинхронный асинхронный двигатель переменного тока, который имеет низкую стоимость и высокую эффективность.
Асинхронный асинхронный двигатель переменного тока представляет собой нелинейную изменяющуюся во времени систему [5] многопараметрической и сильной связи высокого порядка, поэтому метод управления, основанный на статической математической модели двигателя, не смог удовлетворить требованиям его динамических характеристик.В настоящее время методы управления асинхронным асинхронным двигателем переменного тока в HEV представляют собой в основном два вида прямого управления крутящим моментом и векторное управление [6]. На низкой скорости прямое управление крутящим моментом легко вызывает колебание крутящего момента и отсутствие тока замкнутого контура, а также легко создает перегрузку по току, которая не может удовлетворить требованиям высокой стабильности крутящего момента, когда транспортное средство находится в состоянии набора высоты на низкой скорости, в то же время возникают проблемы с повышением температуры двигателя и высоким уровнем шума. Метод векторного управления позволяет обеспечить независимое управление магнитным потоком и крутящим моментом асинхронного асинхронного двигателя переменного тока, который имеет хорошие характеристики управления крутящим моментом, аналогично двигателю постоянного тока, и может повысить эффективность системы привода и достичь максимального контроля эффективности.Кроме того, векторное управление может обеспечить ШИМ-модуляцию с фиксированной частотой коммутации и снизить содержание гармоник в токе двигателя, что в определенной степени снижает повышение температуры двигателя и шум.
Таким образом, в данной статье представлен алгоритм векторного управления, основанный на потокосцеплении ротора, и проводятся исследования по разработке контроллера двигателя гибридного электромобиля с высокими характеристиками, высокой эффективностью и высокой надежностью. Сначала ознакомьтесь с основными принципами алгоритма, создайте модульную платформу моделирования, а затем спроектируйте программное и аппаратное обеспечение контроллера; тем временем проанализируйте электромагнитную совместимость контроллера и примите соответствующие меры по предотвращению помех, чтобы обеспечить нормальную работу оборудования, чувствительного к электромагнитным помехам, такого как шина CAN.Наконец, проведите стендовый эксперимент с двигателем на основе правильной логики управления, такой как повышение надежности связи по шине CAN, обеспечение последовательности включения питания и устранение неисправностей, а также завершите эксперимент по производительности системы привода двигателя.
2. Векторное управление, основанное на ориентированной потокосцеплении ротора
С точки зрения асинхронного двигателя переменного тока, ток, напряжение, магнитный поток и электромагнитный момент взаимосвязаны. Основная идея векторного управления [7, 8] использует метод математического преобразования координат для преобразования тока, трехфразовой обмотки переменного тока,, в, двухфразовой статической обмотки, опять же путем математического преобразования преобразования координат, в ток двухфазной вращающейся обмотки,.По сути, посредством математического преобразования координат преобразуйте ток статора асинхронного двигателя переменного тока в два компонента, один из которых представляет собой компонент возбуждения, который используется для создания вращающегося магнитного потенциала, а другой — компонент крутящего момента, который используется для создания электромагнитного момента, как показано на рисунке 1.