Что такое ротор, и где взялся якорь?
Термины «якорь» и «ротор» довольно давно пополнили словарный запас электротехников и механиков, но откуда взялись эти два выражения, несмотря на их широкое применение в наше время, известно немногим. Слово «якорь», употребляемое для обозначения одной из составляющих двигателя, является довольно старым названием и, даже более того, по своему возрасту этот термин опережает большую массу электротехнических наименований. Впервые «якорем» в электротехнике был назван железный брусок, который притягивался к полюсам магнита.
Данное изобретение впервые нашло применение в производстве магнитных компасов, столь широко полюбившимся мореплавателям в эпоху географических открытий. Основной составной частью компаса являлась магнитная стрелка, изготавливаемая из железа и намагничиваемая природными магнитами. Работе компасов способствовал железный съемный брусок, который имел с одной стороны крючок либо миниатюрную декоративную копию морского якоря для подвешивания гиревой чашки. Гиря была необходима для определения силы прилипания магнита. Сам же брус с крюком, по причине внешнего сходства с общеизвестным приспособлением для кораблей, стал называться «якорем магнита».
Гиря была необходима для определения силы прилипания магнита. Сам же брус с крюком, по причине внешнего сходства с общеизвестным приспособлением для кораблей, стал называться «якорем магнита».
Как стало известно, первые компасы работали благодаря действию исключительно только природных магнитов. Для того, что обеспечить большую «притягательность» природных магнитов, их укрепляли железом, присоединяемым к поверхности камня при помощи немагнитных соединений из меди, серебра и золота.
В 1825 году благодаря труду английского инженера Уильяма Стерджена миру стал известен электромагнит. Изобретение представляло собой согнутый стержень из мягкого железа с обмоткой толстой проволоки. С целью изолирования данный стержень покрывался лаком. Пропуская электрический ток, стержень становился очень сильным магнитом, но полностью терял свойства притягивания, как только ток прерывался. Такая способность электромагнитов и послужила причиной того, что они практически полностью вытеснили из обихода природные магниты, заняв их место в промышленности. Однако, несмотря на появление нового изобретения, способ измерения магнитной силы так и не изменился. В 1838 году в Петербурге была опубликована совместная научная работа двух российских академиков — Б.С. Якоби и Э.Х. Ленца, в которой ученые указали, что «сила притяжения определяется весом гирь, которые накладывались до тех пор, пока якорь не отрывается».
Однако, несмотря на появление нового изобретения, способ измерения магнитной силы так и не изменился. В 1838 году в Петербурге была опубликована совместная научная работа двух российских академиков — Б.С. Якоби и Э.Х. Ленца, в которой ученые указали, что «сила притяжения определяется весом гирь, которые накладывались до тех пор, пока якорь не отрывается».
Открытие Уильяма Стерджена произвело настоящий фурор в области электротехники. Со временем это изобретение было несколько усовершенствовано и доработано, после чего нашло широкое применение в повседневной жизни. Создателем же первых мощных многовитковых электромагнитов является американский физик Джозеф Генри. Добиться большей силы притяжения ему удалось благодаря использованию провода, покрытого изоляцией. Конструкция «уплотненных» электромагнитов Дж. Генри была такова: на малой площади электромагнита размещалось несколько рядов витков изолированной шелком проволоки из меди, при этом каждый из рядов подсоединялся к отдельному аккумуляторы. Параллельно соединяя обмотки, американский ученый добивался существенного увеличения силы тока.
Параллельно соединяя обмотки, американский ученый добивался существенного увеличения силы тока.
Благодаря изобретению многокатушечной обмотки получилось создать первые электромагниты с большой подъемной силой. Электромагниты Генри могли выдерживать груз от 30 до 325 килограмм при весе магнита всего в 10 килограмм. Примечательно то, что для определения подъемной силы электромагнита, физик пользовался все теми же гирями, закрепляемыми на якоре.
В 1831 году Джозеф Генри сконструировал первый в мире электромагнит, способный поднимать вес в одну тонну. Ещё одно достижение этого ученое – разработка электромагнитного звонка. Поставив якорь электромагнита на шарнир, Генри заставил его силой притяжения ударять по колоколу. Работая в области увеличения дальности передачи телеграфных сигналов, американец изобрел невиданный ранее прибор – реле, позволяющее усиливать начальный сигнал извне перед передачей его в последующую цепь. Данное устройство сделало возможной транспортировку телеграфных сигналов практически на любые расстояния.
Джозеф Генри
В том же 1831 году Генри предложил модель электрического двигателя с качающимся коромыслом магнитопривода с катушкой. Якорь совершал в модели двигателя Генри около 75 качений в минуту, мощность же двигателя составляла 0,044 Вт. Качаясь между полюсами постоянных магнитов, входящих в систему, контакты якоря периодически соприкасались с выводами аккумуляторных батарей, подпитывающих катушку электрическим током. В основе работа электрического двигателя Генри лежал принцип возвратно-поступательного движения. Джозеф Генри не возлагал больших надежд на свое изобретение, однако надеялся, что все-таки когда-нибудь оно пригодится для практических целей.
В наше время движущаяся часть магнитного привода уж никак не похожа на корабельный якорь, но по сей день это устройство все же продолжает носить его название. Хоть в эру властвования трехфазного переменного тока вращающаяся часть моторов и получила название ротора, терминология, касаемая двигателей постоянного тока, осталась прежней. Обсуждая конструктивные особенности этих двигателей нередко можно услышать о так называемом якоре. Что обозначает это слово, знает сегодня практически каждый технарь.
Обсуждая конструктивные особенности этих двигателей нередко можно услышать о так называемом якоре. Что обозначает это слово, знает сегодня практически каждый технарь.
Терминология электротехники довольно занимательна – чего стоит только слово «башмак», используемое для обозначения полюсного наконечника, или «cтатор», что в переводе с латинского звучит не иначе как «cтоящий неподвижно». Современная техника меняется год от года, не успеваешь даже следить за её конструктивным эволюционированием, не говоря уже о запоминании новых понятий. Возможно, потому и не стоит менять старую терминологию, что появление новых технических названий вызовет настоящую путаницу.
Лестницы. Входная группа. Материалы. Двери. Замки. Дизайн
Балансировка роторов и якорей электродвигателя. Отличие статической и динамической балансировки деталей, их назначение. Технология балансировки якорей В помощь балансировка ротора якоря стробоскоп
Большинство станков ремонтных заводов выполнены по принципу измерения величины вектора дисбаланса по максимальному отклонению опор на резонансных частотах вращения. Этим измеряется величина вектора. Направление вектора фиксируется следящей системой по углу поворота проверяемого тела вращения. Показатели суммируются в измерительном устройстве, по взаимной реакции катушек прибора, по принципу электродинамического ваттметра.
Этим измеряется величина вектора. Направление вектора фиксируется следящей системой по углу поворота проверяемого тела вращения. Показатели суммируются в измерительном устройстве, по взаимной реакции катушек прибора, по принципу электродинамического ваттметра.
Первоначально замеряется существующий дисбаланс. Его коррекция заключается в установке балансировочных грузов предусмотренных чертежом изделия в направлении прямо противоположном измеренному вектору. Либо в небольшом снятии металла в направлении строго соответствующему измеренному вектору.
Грузы в зависимости от конструкции узла закрепляются временно или постоянно. Производится повторный замер вектора и корректировка установленных грузов, либо их, предусмотренное конструкцией, окончательное закрепление, если величина остаточного дисбаланса соответствует допускаемой
Серийно выпущенные станки для динамической балансировки
Весьма широко применяются станки производства Минского станкостроительного завода типа 9717, 9718, 9719. Это оборудование имеет значительные габариты и требует для установки железобетонных фундаментов большого объема. На них осуществляется балансировка деталей и сборочных единиц от 0,5 до 5.0 тонн. Это якоря электрических машин и колесные пары. С середины 80-х годов была изменена конструкция фланцев якорей генераторов. Внешняя поверхность гнезда под установку кольца для центровки выполнена в виде удлиненного бурта цилиндрической формы, которая может непосредственно служить базовой поверхностью при динамической балансировке якоря. Это позволило отказаться от установки дополнительных втулок, уменьшить трудоемкость операции и увеличить ее точность.
Это оборудование имеет значительные габариты и требует для установки железобетонных фундаментов большого объема. На них осуществляется балансировка деталей и сборочных единиц от 0,5 до 5.0 тонн. Это якоря электрических машин и колесные пары. С середины 80-х годов была изменена конструкция фланцев якорей генераторов. Внешняя поверхность гнезда под установку кольца для центровки выполнена в виде удлиненного бурта цилиндрической формы, которая может непосредственно служить базовой поверхностью при динамической балансировке якоря. Это позволило отказаться от установки дополнительных втулок, уменьшить трудоемкость операции и увеличить ее точность.
Рис.20 Балансировка якоря на станке 9719
Новое поколение станков
В последнее время на заводах появилось новое поколение балансировочных станков предлагаемых сегодня рынком. В частности это станки фирмы «ДИАМЕХ». Особенностью станков является то, что замер дисбаланса производится не за счет максимального отклонения подвижных подшипниковых опор, а за счет реакции жестко закрепленных опор. При этом сама реакция измеряется как величина напряжений тензометрическим способом при помощи встроенных датчиков. Все результаты суммируются и обрабатываются на встроенном в станок компьютере с выводом информации на дисплей.
При этом сама реакция измеряется как величина напряжений тензометрическим способом при помощи встроенных датчиков. Все результаты суммируются и обрабатываются на встроенном в станок компьютере с выводом информации на дисплей.
Данная конструкция станка не требует фундаментов для своего монтажа. Установка станка осуществляется непосредственно на поверхности полов. Габариты этих станков незначительно превышают габариты изделия подвергаемого балансировке.
Рис.21 Динамическая балансировка на станке ВМ3000 фирмы ДИАМЕХ
Весьма характерной деталью для станков нового поколения является отсутствие фундамента и передача детали вращения ременным приводом.
После ремонта роторы электрических машин в сборе с вентиляторами и другими вращающимися частями подвергают статической или динамической балансировке на специальных балансировочных станках. Эти станки служат для выявления неуравновешенности массы ротора, являющейся основной причиной возникновения вибрации при работе машины. Вибрация, вызванная центробежными силами, достигающими при большой частоте вращения несбалансированного ротора значительных величин, может стать причиной разрушения фундамента и аварийного выхода машины из строя.
Вибрация, вызванная центробежными силами, достигающими при большой частоте вращения несбалансированного ротора значительных величин, может стать причиной разрушения фундамента и аварийного выхода машины из строя.
Для статической балансировки роторов и якорей служит станок (рис. 12, а), представляющий собой опорную конструкцию из профильной стали и установленными на ней призмами трапециевидной формы. Длина призм должна быть такой, чтобы ротор мог сделать на них не менее двух оборотов.
Ширину рабочей поверхности призм станков для балансировки роторов массой до 1 т принимают равной 3—5 мм. Рабочая поверхность призм должна быть хорошо отшлифована и способна, не деформируясь, выдерживать массу балансируемого ротора.
Статическую балансировку ротора на станке производят в такой последовательности. Ротор укладывают шейками вала на рабочие поверхности призм. При этом ротор, перекатываясь на призмах, займет такое положение, при котором его наиболее тяжелая часть окажется внизу.
Для определения точки окружности, в которой должен быть установлен балансирующий груз, ротор 5—6 раз перекатывают и после каждого останова отвечают мелом нижнюю «тяжелую» точку. После этого на небольшой части окружности ротора окажется пять меловых черточек.
Отметив середину расстояния между крайними меловыми отметками, определяют точку установки уравновешивающего груза: она находится в месте, диаметрально противоположном средней «тяжелой» точке. В этой точке устанавливают уравновешивающий груз, массу которого подбирают опытным путем до тех пор, пока ротор не перестанет перекатываться, будучи оставлен в любом произвольном положении. Правильно сбалансированный ротор после перекатывания в одном и другом направлениях должен во всех положениях находиться в состоянии безразличного равновесия.
При необходимости более полного обнаружения и устранения оставшегося небаланса, окружность ротора делят на шесть равных частей. Затем, укладывая ротор на призмах так, чтобы каждая из отметок поочередно находилась на горизонтальном диаметре, в каждую из шести точек поочередно навешивают небольшие грузы до тех пор, пока ротор не выйдет из состояния покоя.
При статическом методе балансировки уравновешивающий груз устанавливают только на одном торце ротора и таким образом устраняют статический небаланс. Однако этот способ балансировки применим только для коротких роторов и якорей мелких и тихоходных машин. Для уравновешивания масс роторов и якорей крупных электрических машин с большей частотой вращения (более 1000 об/мин) применяют динамическую балансировку, при которой уравновешивающий груз устанавливают на обоих торцах ротора. Это объясняется тем, что при вращении ротора с большой частотой каждый его торец имеет самостоятельное биение, вызванное не-сбалансированными массами.
Для динамической балансировки наиболее удобен станок резонансного типа (рис. 12, б), состоящий из двух сварных стоек 1, опорных плит 9 и балансировочных головок. Головки состоят из подшипников 8, сегментов 6 и могут быть закреплены неподвижно болтами 7 либо свободно качаться на сегментах.
Динамическая балансировка роторов состоит из двух операций: измерения первоначальной величины вибрации, дающей представление о размерах неуравновешенности масс ротора; нахождения точки размещения и определения массы уравновешивающего груза для одного из торцов ротора.
При первой операции головки станка закрепляют болтами 7. Ротор электродвигателем приводится во вращение, после чего привод отключают, расцепляя муфту, и освобождают одну из головок станка. Освобожденная головка под действием радиально направленной центробежной силы небаланса раскачивается, что позволяет стрелочным индикатором 3 измерить амплитуду колебания головки. Такое же измерение производят для второй головки.
Вторую операцию выполняют методом «обхода грузом». Разделив обе стороны ротора на шесть равных частей, в каждой точке поочередно закрепляют пробный груз, который должен быть меньше предполагаемого небаланса.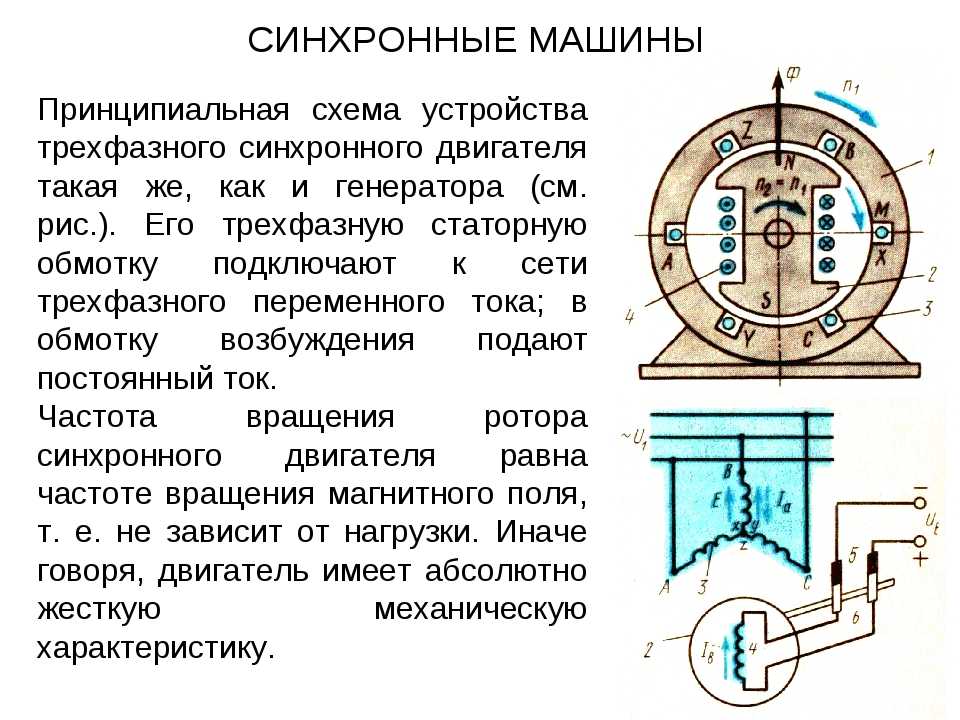 Затем описанным выше способом измеряют колебания головки для каждого положения груза. Самым удоб-ным местом размещения груза будет точка, в которой амплитуда колебаний была минимальной.
Затем описанным выше способом измеряют колебания головки для каждого положения груза. Самым удоб-ным местом размещения груза будет точка, в которой амплитуда колебаний была минимальной.
Массу уравновешивающего груза Q (кг) определяют по формуле:
где Р—масса пробного круга, К0—первоначальная амплитуда колебаний до обхода пробным грузом, К min— минимальная амплитуда колебаний при обходе пробным грузом.
Закончив балансировку одной стороны ротора, таким же способом балансируют вторую сторону. Балансировка, считается удовлетворительной, если центробежная сила оставшейся неуравновешенности не превышает 3% массы ротора. Это условие можно считать выполненным, если амплитуда оставшихся колебаний головки балансировочного станка находится в пределах, определяемых выражением:
Где Вр— масса балансируемого ротора, т.
После окончания балансировки временно установленный на роторе груз закрепляют. В качестве балансировочного груза используют куски полосовой или квадратной стали. Груз крепят к ротору сваркой или винтами. Крепление груза должно быть надежным, так как недостаточно прочно закрепленный груз может в процессе работы машины оторваться от ротора и стать причиной аварии или несчастного случая. Закрепив груз постоянно, ротор подвергают проверочной балансировке, затем передают в сборочное отделение для сборки машины.
Груз крепят к ротору сваркой или винтами. Крепление груза должно быть надежным, так как недостаточно прочно закрепленный груз может в процессе работы машины оторваться от ротора и стать причиной аварии или несчастного случая. Закрепив груз постоянно, ротор подвергают проверочной балансировке, затем передают в сборочное отделение для сборки машины.
Отремонтированные электрические машины подвергают послеремонтным испытаниям по установленной программе: они должны удовлетворять требованиям, предъявляемым к ней стандартами или ТУ.
На ремонтных предприятиях проводят следующие виды испытаний: контрольные — для определения качества электрооборудования; приемо-сдаточные — при сдаче отремонтированного электрооборудования ремонтным предприятием и приеме заказчиком; типовые, после внесения изменения в конструкцию электрооборудования или технологию его ремонта для оценки целесообразности внесенных изменений. В ремонтной практике чаще всего применяют контрольные и приемо-сдаточные испытания.
Каждую электрическую машину после ремонта вне зависимости от его объема подвергают приемо-сдаточным испытаниям. При испытаниях, выборе измерительных приборов, сборке схемы измерений, подготовке испытуемой электрической машины, установлении методики и норм испытаний, а также для оценки результатов испытаний используют соответствующие стандарты и ресурсы.
Если при ремонте машины не изменена её мощность или частота вращения, после капитального ремонта машину подвергают контрольным испытаниям, а при изменении мощности или частоты вращения — типовым испытаниям.
Сбалансирован ротор или якорь электродвигателя, когда центр тяжести совмещен с осью вращения.
После ремонта ротора или якоря электродвигателя их обязательно необходимо подвергнуть статической, а иногда и динамической балансировке в сборе с вентиляторами и другими вращающимися частями.
И ротор, и якорь электродвигателя состоят из большого количества деталей, поэтому распределение масс в них не может быть строго равномерным. Чаще всего причина неравномерного распределения масс заключается в разной толщине или массе отдельных деталей, наличии в них раковин, неодинаковый вылет лобовых частей обмотки и пр.
Чаще всего причина неравномерного распределения масс заключается в разной толщине или массе отдельных деталей, наличии в них раковин, неодинаковый вылет лобовых частей обмотки и пр.
Каждая из деталей, входящих в состав собранного ротора или якоря, может быть неуравновешенной вследствие смещения ее осей инерции от оси вращения. В собранном роторе или якоре неуравновешенные массы отдельных деталей в зависимости от их расположения могут суммироваться или взаимно компенсироваться. Роторы и якоря, у которых главная центральная ось инерции не совпадает с осью вращения, называют неуравновешенными.
Неуравновешенность, как правило, складывается из суммы двух неуравновешенностей — статической и динамической.
Вращение статически и динамически неуравновешенного ротора и якоря является частой причиной возникновения вибрации при работе электродвигателя, способной разрушить подшипники и фундамент механизма. Разрушающее воздействие неуравновешенных роторов и якорей устраняют путем их балансировки, которая заключается в определении размера и места неуравновешенной массы.
Балансировка производятся нашими мастерами на специальном оборудовании для выявления неуравновешенности масс ротора (якоря).
Неуравновешенность определяют статической или динамической балансировкой. Выбор способов балансировки зависит от требуемой точности уравновешивания в каждой конкретной ситуации. При динамической балансировке получаются более высокие результаты компенсации неуравновешенности (меньшая остаточная неуравновешенность), чем при статической. При выборе способа балансировки необходимо учитывать много нюансов. Например, статическая балансировка применяется для роторов, вращающихся с частотой, не превышающей 1000 об/мин. Статически уравновешенный ротор (якорь) может иметь динамическую неуравновешенность, поэтому роторы, вращающиеся с частотой выше 1000 об/мин, рекомендуют подвергать динамической балансировке, при которой одновременно устраняются оба вида неуравновешенностей — и статическая и динамическая.
Наши специалисты проходят специальное обучение работе с балансировочными станками и приборами, имеют солидный опыт в балансировке и отлично разбираются во всех механизмах электродвигателей. Обратившись в «Элпромтехцентр», Вы можете быть уверены, что все машины на вашем производстве будут работать четко и без сбоев, ведь мы соблюдаем все правила и гарантируем высокое качество проведенных работ.
Обратившись в «Элпромтехцентр», Вы можете быть уверены, что все машины на вашем производстве будут работать четко и без сбоев, ведь мы соблюдаем все правила и гарантируем высокое качество проведенных работ.
Если у Вас есть вопросы по поводу перемотки электродвигателей, Вы хотите получить консультацию, рассчитать стоимость или записаться на ремонт — обращайтесь к специалистам «Элпромтехцентр» в отдел по ремонту электрооборудования.
Сборка является заключительным
технологическим процессом, от качества исполнения которого в значительной
мере зависят энергетические и эксплуатационные показатели машин — КПД,
уровень вибраций и шума, надежность и долговечность. Сборку необходимо
производить используя детали и сборочные единицы, принадлежащие данной
машине, так как обезличенная сборка более сложна в организационном отношении
и при ней возможны случаи, когда характеристики машины не будут
соответствовать требованиям стандартов. На качество сборки влияют правильная
организация рабочего места и использование исправного инструмента.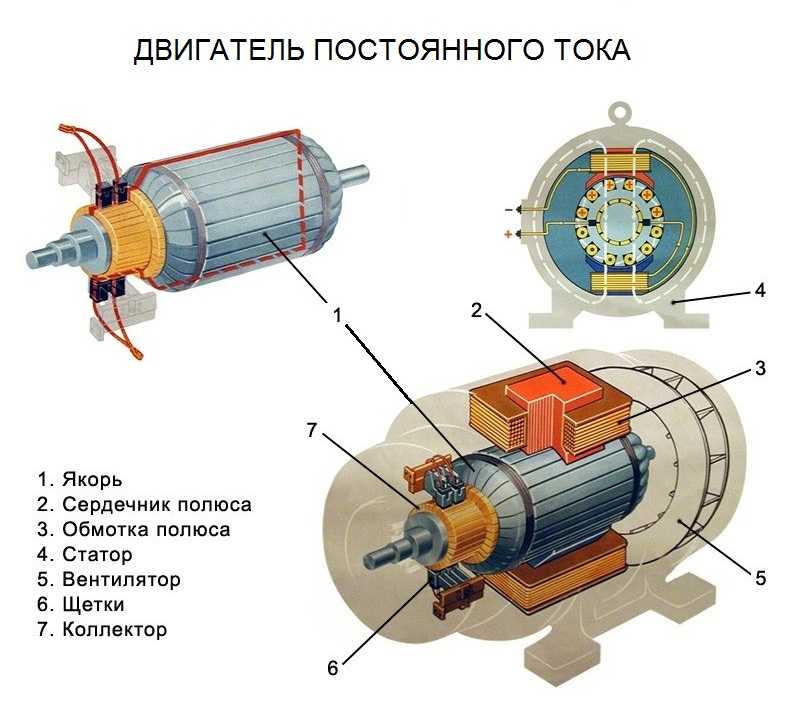 Собранная
машина подвергается обкатке и испытаниям.
Собранная
машина подвергается обкатке и испытаниям.
§ 10.1. Балансировка роторов и якорей
Перед сборкой производят балансировку роторов (якорей) и других вращающихся деталей, если они ремонтировались или при предремонтных испытаниях была обнаружена повышенная вибрация. Согласно ГОСТ 12327-79 компенсация неуравновешенности должна производиться в двух плоскостях исправления при отношении осевого размера L детали к диаметру D больше 0,2; при L/D
При одной плоскости исправления ротор (якорь) можно балансировать как статическим, так и динамическим способами, а при двух плоскостях — только динамическим.
Статическая балансировка. Ротор балансируют на призмах (10.1). Отклонение плоскости призм от горизонтальной плоскости не должно превышать 0,1 мм на 1 м длины призмы. Шероховатость поверхности призм должна быть не хуже
Ротор (якорь) устанавливают на призмы и легким толчком
выводят из равновесия, предоставляя ему возможность катиться по призмам.
После нескольких качаний несбалансированный ротор (якорь) остановится.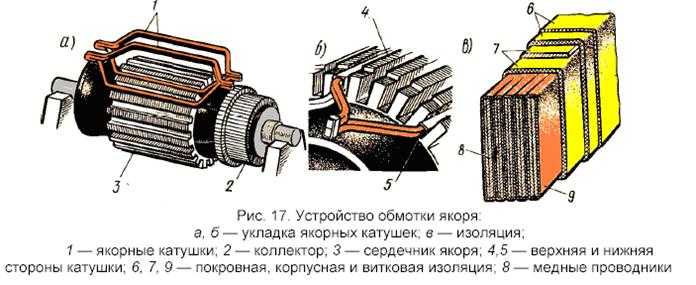 В
верхней точке ротора устанавливают пробный груз и повторяют опыт. Так
поступают несколько раз и подбирают груз. Ротор считается отбалансированным,
если он останавливается без качаний в состоянии безразличного равновесия.
Пробный груз взвешивают и на его место устанавливают штатный груз, равный по
массе пробному.
В
верхней точке ротора устанавливают пробный груз и повторяют опыт. Так
поступают несколько раз и подбирают груз. Ротор считается отбалансированным,
если он останавливается без качаний в состоянии безразличного равновесия.
Пробный груз взвешивают и на его место устанавливают штатный груз, равный по
массе пробному.
Если балансируемые детали не имеют вала, то изготовляют технологический вал, на котором производят балансировку.
Динамическая балансировка. Ротор балансируют на станке при его вращении. Современные балансировочные станки позволяют определить место установки и массу груза. Их использование при ремонте весьма желательно, но при большой номенклатуре ремонтируемых машин частная переналадка снижает эффективность станков и их применение не всегда является обоснованным. Использование универсального балансировочного станка позволяет решить эту задачу (10.2).
Балансируемый ротор 4 устанавливают на четыре круглые
опоры 2 и 6. Опоры расположены на раме 7, состоящей из двух круглых балок. Двигателем 5 через ремень 3 ротор приводится во вращение. Левая сторона рамы
крепится к основанию плоской пружиной 1 и при вращении ротора остается
неподвижной, а правая сторона опирается на пружины 9 и при вращении ротора
начинает колебаться под действием неуравновешенных масс правой стороны
ротора.
Двигателем 5 через ремень 3 ротор приводится во вращение. Левая сторона рамы
крепится к основанию плоской пружиной 1 и при вращении ротора остается
неподвижной, а правая сторона опирается на пружины 9 и при вращении ротора
начинает колебаться под действием неуравновешенных масс правой стороны
ротора.
Величину колебаний показывает стрелочный индикатор 8. После определения величины колебаний останавливают ротор и навешивают пробный груз (пластилин) на правую сторону ротора. Если при очередном вращении величина колебаний увеличивается, то это означает, что пробный груз установлен неверно. Передвигая груз по окружности, находят место, где его расположение вызывает наименьшие колебания. Затем начинают изменять массу пробного груза, добиваясь минимума колебаний. Отбалансировав правую часть, снимают пробный и устанавливают постоянный груз. Затем ротор поворачивают и балансируют вторую сторону.
7-6. БАЛАНСИРОВКА РОТОРОВ
Если вращающаяся часть машины не уравновешена, то при вращении ее появляется сотрясение (вибрация) всей машины. Вибрация вызывает разрушение подшипников, фундамента и самой машины. Для устранения
Вибрация вызывает разрушение подшипников, фундамента и самой машины. Для устранения
вибрации вращающиеся части должны быть отбалансированы. Различают балансировку статическую, выполняемую на призмах, и динамическую при вращении балансируемой детали. Если, например, ротор, изображенный на рис. 7-9,а, имеет более тяжелую половину //, то при вращении центробежная сила этой половины будет больше центробежной силы половины /. Она будет создавать давление на подшипники, переменное по на-
Рис. 7-9. Смещение центра тяжести ротора,
правлению, и вызывать сотрясение машины. Такай небаланс устраняется статической балансировкой на призмах. Ротор шейками вала ставится «а призмы, точно выверенные по горизонтали, и при этом, естественно, поворачивается тяжелой стороной вниз. На верхнюю сторону в специальные канавки, которые предусматриваются в нажимных шайбах и обмоткодержателях, подбирают и ставят свинцовые грузы такого веса, чтобы ротор оставался.на призмах в безразличном положении.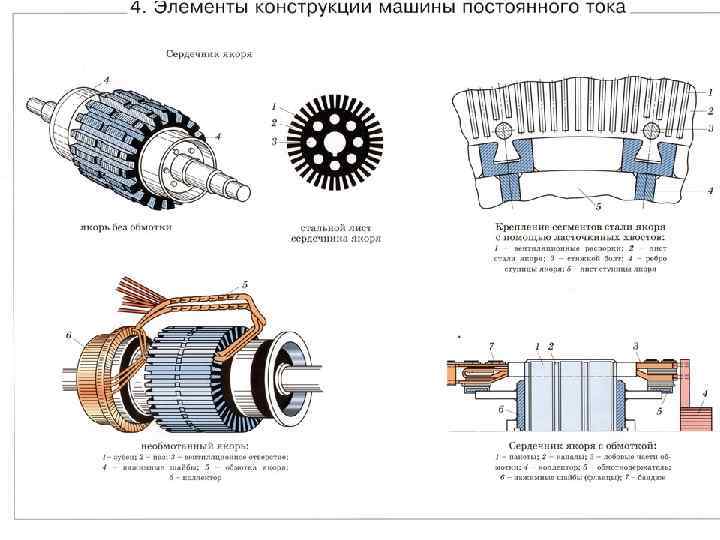 После балансировки свинцовые грузы обычно заменяют на стальные одинакового веса, которые надежно приваривают или привертывают к ротору. Однако для длинных якорей и роторов статической балансировки недостаточно. Даже если отбалансировать обе половины ротора так, что веса обеих половин будут одинаковыми (рис. 7-9,6), то может оказаться, что центры тяжести сдвинуты по оси машины. В этом случае центробежные силы двух половин не могут уравновесить друг друга, а создают пару сил, вызывающую переменное давление на подшипники. Для устранения действия этой пары сил должны быть размещены специальные грузы (рис. 7-9,6) с тем, чтобы создать пару сил, действующую обратно паре сил.небаланса. Найти величину и положение этих
После балансировки свинцовые грузы обычно заменяют на стальные одинакового веса, которые надежно приваривают или привертывают к ротору. Однако для длинных якорей и роторов статической балансировки недостаточно. Даже если отбалансировать обе половины ротора так, что веса обеих половин будут одинаковыми (рис. 7-9,6), то может оказаться, что центры тяжести сдвинуты по оси машины. В этом случае центробежные силы двух половин не могут уравновесить друг друга, а создают пару сил, вызывающую переменное давление на подшипники. Для устранения действия этой пары сил должны быть размещены специальные грузы (рис. 7-9,6) с тем, чтобы создать пару сил, действующую обратно паре сил.небаланса. Найти величину и положение этих
грузов можно путем балансировки вращающегося ротора (динамическая балансировка).
Перед проведением динамической балансировки следует проверить рабочие поверхности ротора (шейки и концы вала, коллектор, контактные кольца, сталь ротора) на отсутствие биения и при необходимости устранить его. Если для установки ротора на станок приме-
Если для установки ротора на станок приме-
Рис. 7-10. Схема динамической балансировки,
«лютея какие-либо оправки, то они должны быть проверены на отсутствие биения и небаланса.
Па роторе не должно быть плохо закрепленных деталей, так как в этом случае балансировка невозможна. Для проведения динамической балансировки ротор укладывают в подшипники специального станка. Эти подшипники укреплены на плоских пружинах и по желанию могут либо быть закреплены неподвижно специальным тормозом, либо совершать свободные колебания вместе с пружиной (рис. 7-10,а). Ротор при помощи электродвигателя и муфты приводится во вращение. Появляющаяся при этом сила небаланса, которая направлена радиально, будет раскачивать подшипники станка. Для проведения балансировки один подшипник закрепляется тормозом неподвижно, второй освобождается и под влиянием небаланса колеблется. На какой-либо точно обработанной поверхности ротора, концентричной с осью вала, делают цветным карандашом отметку, показывающую точку наибольшего отклонения ротора (рис. 7-10,6).
7-10,6).
Однако по этой точке еще нельзя точно определить
место, где находится небаланс ротора, так как наибольшее отклонение ротора получается после прохождения силы небаланса через горизонтальную плоскость, в которой находится отметчик (карандаш).
Угол сдвига (т. е. угол между точкой небаланса и отметкой) зависит от отношения скорости вращения к собственной частоте колебания ротора на опорах, т. е. к частоте колебаний, которые будут иметь место, если толкнуть невращающийся ротор, установленный на опорах станка.
При совпадении числа оборотов в секунду с собственной частотой имеет место резонанс. Колебания приобретают наибольший размах и, следовательно, станок становится наиболее чувствительным. Поэтому стремятся вести балансировку при резонансном числе оборотов. При этом указанный выше угловой сдвиг становится близким к 90° и, следовательно, место небаланса может быть найдено отсчетом от середины отметки-90° вперед по вращению (а место установки груза 90° против вращения). Если же почему-либо работать на резонансной скорости нельзя, то для определения места положения небаланса повторяют описанный опыт при обратном направлении вращения при том же числе оборотов в ми-иуту. Отметку делают карандашом другого цвета. Тогда середина между двумя отметками определяет место, где находится небаланс. В диаметрально противоположной точке устанавливают балансный груз. Величину этого груза определяют подбором до исчезновения вибрации подшипника. Вместо укрепления груза балансировка может быть получена путем высверливания противополож-«ой части якоря. После того как отбалансирована одна сторона ротора, подшипник этой стороны закрепляют неподвижно, а подшипник второй стороны освобождают и аналогичными приемами балансируют вторую сторону. После этого проверяют балансировку первой стороны и в случае необходимости корректируют и т. д.
Если же почему-либо работать на резонансной скорости нельзя, то для определения места положения небаланса повторяют описанный опыт при обратном направлении вращения при том же числе оборотов в ми-иуту. Отметку делают карандашом другого цвета. Тогда середина между двумя отметками определяет место, где находится небаланс. В диаметрально противоположной точке устанавливают балансный груз. Величину этого груза определяют подбором до исчезновения вибрации подшипника. Вместо укрепления груза балансировка может быть получена путем высверливания противополож-«ой части якоря. После того как отбалансирована одна сторона ротора, подшипник этой стороны закрепляют неподвижно, а подшипник второй стороны освобождают и аналогичными приемами балансируют вторую сторону. После этого проверяют балансировку первой стороны и в случае необходимости корректируют и т. д.
В настоящее время существует большое число станков для динамической балансировки, на которых местоположения и величины груза определяются достаточно удобно и точно. Методы работы на этих станках даются в инструкциях заводов-изготовителей.
Методы работы на этих станках даются в инструкциях заводов-изготовителей.
При отсутствии специальных станков динамическая балансировка может производиться на прочных дере-
вянных брусьях, уложенных на резиновые прокладки. На эти брусья кладут либо непосредственно шейки вала балансируемого ротора, либо вкладыши подшипников, в которых лежат шейки вала. При помощи клиньев брусья могут закрепляться неподвижно. Ротор разворачивается ременной передачей, охватывающей непосредственно сталь, затем клин вынимается, и подшипник получает возможность колебаться на резиновых подкладках. Процесс балансировки аналогичен описанному выше.
В условиях ремонта, в особенно для крупных машин, целесообразна балансировка в собранном виде [Л. 8]; для этой цели машину запускают вхолостую и измеряют вибрацию подшипников Это измерение следует производить при помощи виброметров (например, типов ВР-1, ВР-3, 2ВК, ЗВК).
При отсутствии виброметров вибрацию можно измерить индикатором, укрепленным на массивной тяжелой рукоятке Прижимая щуп такого индикатора к колеблющейся детали, можно по ширине размытого очертания стрелки определить величину размаха колебания
Следует иметь в виду, что показания такого виброметра сильно зависят от скорости вращения и что поэтому его показания можно яопользавать главным образом как сравнительные при одном и том же числе оборотов машины, что достаточно для целей балансировки.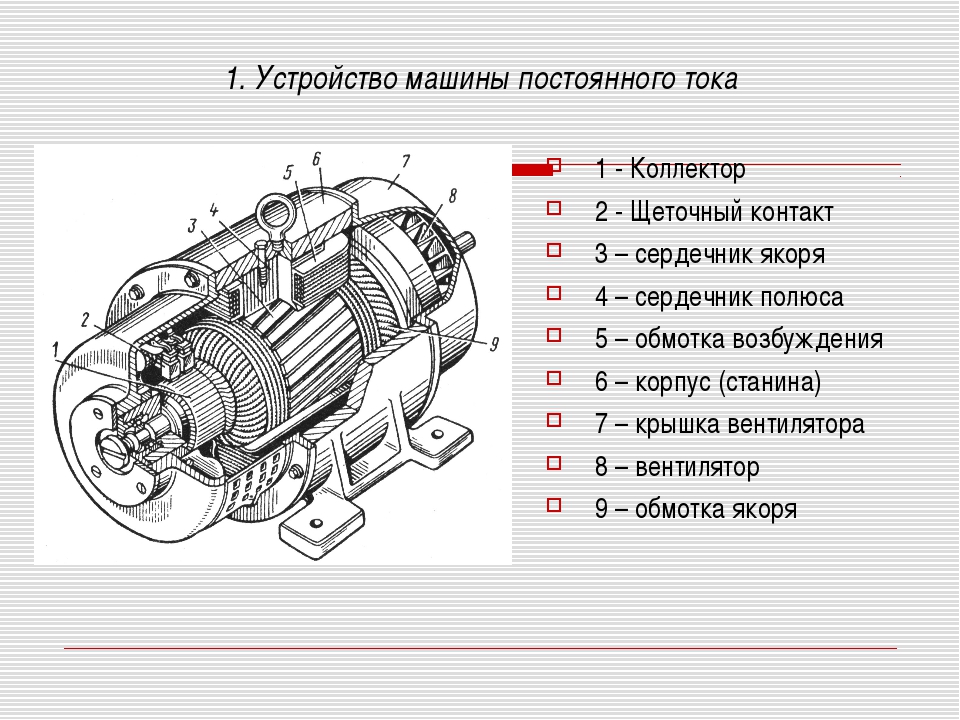
Измеряя вибрацию подшипника в различных направлениях, находят точку наибольшей вибрации. По этой точке и ведется балансировка.
Для нахождения величины и местоположения балансировочного груза на ротор в произвольную точку помещают пробный груз и снова измеряют вибрацию. Очевидно, что, изучив, как влияет на вибрацию пробный груз, величина и местоположение которого известны, можно определить и величину небаланса и место его положения. Если можно измерить, как в результате установки пробного груза именяется величина и фаза вибрации (см. ниже), то можно обойтись двумя измерениями: до и после установки пробного груза. Если же определить изменение фазы нельзя, то необходимо сделать большее (3-4) число измерений величины вибрации. Пробный груз помещается при этом вначале в какую-либо произвольную точку, а затем поочередно в точки, отстоящие на Уз окружности вправо и влево от первой.
Для определения изменения фазы можно прибегнуть к отметкам на валу, как это описывалось выше. Вал при этом закрашивается мелом и острой чертилкой осторож-«0 наносятся (по возможности короткие) метки, середи-!на которых соответствует наибольшему отклонению вала в плоскости, где расположен отметчик (чертилка). Угловое расстояние (угол а) между метками при отсутствии пробного груза и при его наличии является мерой сдвига фазы колебания, обусловленного внесением пробного груза.
Вал при этом закрашивается мелом и острой чертилкой осторож-«0 наносятся (по возможности короткие) метки, середи-!на которых соответствует наибольшему отклонению вала в плоскости, где расположен отметчик (чертилка). Угловое расстояние (угол а) между метками при отсутствии пробного груза и при его наличии является мерой сдвига фазы колебания, обусловленного внесением пробного груза.
Более точно сдвиг фазы определяется стробоскопическим способом. В этом случае на торец вала наносится метка, освещаемая вспышками газосветной лампы. Эта лампа управляется специальным контактом, имеющимся з виброметре, который замыкается 1 раз за оборот вала в момент, близкий к наибольшему размаху колебания.
Метка на вращающемся валу кажется при этом неподвижной (поскольку лампа освещает ее каждый раз в тот момент, когда она, пройдя один оборот, окажется точно в том же положении), и против нее «а неподвижной части машины также может быть нанесена метка.
После внесения пробного груза отметка на валу сдвигается относительно отметки на неподвижной части. Нанеся вторую отметку на неподвижной части, соответствующую новому положению отметки на валу, и измерив угловое расстояние (угол а) между ними, определяем угол сдвига фазы колебания.
Нанеся вторую отметку на неподвижной части, соответствующую новому положению отметки на валу, и измерив угловое расстояние (угол а) между ними, определяем угол сдвига фазы колебания.
Возможность определения фазы стробоскопическим способом предусмотрена в специальных балансировочных виброскопах системы Колесника 2ВК, ЗВК, выпускаемых Ленинградским инструментальным заводом, и в виброскопах типа БИП Киевского электромеханического завода
Графический метод определения местоположения груза виден из рис. 7-11,а. Здесь отрезок-„вектор» оа в определенном масштабе равен размаху колебания подшипника до внесения пробного груза. Пробный груз Р тр ставится в плоскости, сдвинутой от отметки, полученной при этом на валу на какой-либо угол, например на 90°,-линия О В. Измерив теперь размах колебания подшипника (при том же числе оборотов в минуту), отметив новую метку и определив угловой сдвиг между отметками — а, отложим теперь в том же масштабе под углом « к вектору оа вектор ob,
Очевидно, что если вектор оа изображает вибрацию от небаланса, вектор ob вибрацию от совместного дей-ствия пробного груза и небаланса, то разностный век. R 3 видны из рис. 7-111,б. Несмотря на такое распределение груза Q»2, приходится обычно еще раз производить (корректировочную) балансировку.первой стороны после того, как установлены грузы Q 2 и СЬ Д.
R 3 видны из рис. 7-111,б. Несмотря на такое распределение груза Q»2, приходится обычно еще раз производить (корректировочную) балансировку.первой стороны после того, как установлены грузы Q 2 и СЬ Д.
Наиболее просто качество балансировки может быть проверено путем установки машины на гладкостроганую горизонтальную плиту. При удовлетворительной балансировке машина, работающая с номинальным числом оборотов, не должна иметь качаний и перемещений по плите. Проверка производится при холостом ходе в режиме двигателя.
Ответы на семь общих вопросов о работе генераторов и двигателей
Вращающееся оборудование настолько распространено, но так неправильно понимается, что даже очень опытные электрики и инженеры часто сталкиваются с вопросами об их работе. В этой статье мы ответим на семь наиболее часто задаваемых вопросов. Объяснения краткие и практичные из-за ограниченного места; тем не менее, они позволят вам лучше понять это оборудование.
Вопрос №1: Якорь, поле, ротор, статор: что есть что?
Статор по определению состоит из всех невращающихся электрических частей генератора или двигателя. Также по определению ротор включает в себя все вращающиеся электрические части.
Также по определению ротор включает в себя все вращающиеся электрические части.
Поле машины — это часть, которая создает прямое магнитное поле. Ток в поле не переменный. Обмотка якоря — это та, которая генерирует или имеет приложенное к ней переменное напряжение.
Обычно термины «якорь» и «поле» применяются только к генераторам переменного тока, синхронным двигателям, двигателям постоянного тока и генераторам постоянного тока.
Генераторы переменного тока . Поле синхронного генератора представляет собой обмотку, на которую подается постоянный ток возбуждения. Якорь – это обмотка, к которой подключена нагрузка. В малых генераторах обмотки возбуждения часто находятся на статоре, а обмотки якоря — на роторе. Однако большинство больших машин имеют вращающееся поле и неподвижный якорь.
Синхронный двигатель практически идентичен синхронному генератору. Таким образом, якорь — это статор, а поле — это ротор.
Машины постоянного тока . В машинах постоянного тока, как двигателях, так и генераторах, ротором является якорь, а статором — поле. Поскольку якорь всегда является ротором в машинах постоянного тока, многие электрики и инженеры ошибочно полагают, что ротором всех двигателей и генераторов является якорь.
В машинах постоянного тока, как двигателях, так и генераторах, ротором является якорь, а статором — поле. Поскольку якорь всегда является ротором в машинах постоянного тока, многие электрики и инженеры ошибочно полагают, что ротором всех двигателей и генераторов является якорь.
Вопрос № 2: Я ослабил натяжение пружины на щетках, но они по-прежнему изнашиваются слишком быстро. Почему?
Износ щеток происходит по двум основным причинам: механическое трение и электрический износ. Механическое трение вызывается трением щеток о коллектор или контактное кольцо. Электрический износ вызван искрением и искрением щетки, когда она движется по коллектору. Механическое трение увеличивается с давлением щетки; Электрический износ уменьшается с давлением щетки.
Для любой установки щетки существует оптимальное давление щетки. Если давление снижается ниже этой величины, общий износ увеличивается, поскольку увеличивается электрический износ. Если давление увеличивается выше оптимального значения, общий износ снова увеличивается из-за увеличения механического трения.
Всегда следите за тем, чтобы давление щетки было установлено на уровне, рекомендованном производителем. Если износ по-прежнему чрезмерный, следует изучить тип и размер используемой щетки. Помните, что плотность тока (ампер на квадратный дюйм щетки) должна соответствовать применению. Надлежащая плотность тока необходима для того, чтобы на коллекторе или контактном кольце образовалась смазочная проводящая пленка. Эта пленка состоит из влаги, меди и углерода. Недостаточная плотность тока препятствует образованию этой пленки и может привести к чрезмерному износу щеток.
Кроме того, среда с очень низкой влажностью не обеспечивает достаточного количества влаги для образования смазочной пленки. Если в такой среде возникает проблема чрезмерного износа щеток, возможно, вам придется увлажнить место, где работает машина.
Вопрос № 3: Что такое сервис-фактор?
Коэффициент эксплуатации — это нагрузка, которая может быть приложена к двигателю без превышения допустимых значений. Например, если двигатель мощностью 10 л.с. имеет эксплуатационный фактор 1,25, он будет успешно развивать мощность 12,5 л.с. (10 x 1,25) без превышения заданного повышения температуры. Обратите внимание, что при таком приводе выше номинальной нагрузки двигатель должен питаться с номинальным напряжением и частотой.
Например, если двигатель мощностью 10 л.с. имеет эксплуатационный фактор 1,25, он будет успешно развивать мощность 12,5 л.с. (10 x 1,25) без превышения заданного повышения температуры. Обратите внимание, что при таком приводе выше номинальной нагрузки двигатель должен питаться с номинальным напряжением и частотой.
Однако имейте в виду, что двигатель мощностью 10 л.с. с коэффициентом эксплуатации 1,25 не является двигателем мощностью 12,5 л.с. Если двигатель мощностью 10 л.с. будет постоянно работать при мощности 12,5 л.с., срок службы его изоляции может сократиться на две трети от нормального. Если вам нужен двигатель мощностью 12,5 л.с., купите его; эксплуатационный коэффициент следует использовать только для кратковременных условий перегрузки.
Вопрос № 4: Что такое вращающееся магнитное поле и почему оно вращается?
Вращающееся магнитное поле — это поле, северный и южный полюса которого движутся внутри статора, как если бы внутри машины вращался стержневой магнит или магниты.
Посмотрите на статор трехфазного двигателя, показанный на прилагаемой схеме. Это двухполюсный статор с тремя фазами, расположенными с интервалом 120 [градусов]. Ток от каждой фазы входит в катушку на одной стороне статора и выходит через катушку на противоположной стороне. Таким образом, если одна из катушек создает магнитный северный полюс, другая катушка (для той же фазы) создаст магнитный южный полюс на противоположной стороне статора.
В Позиции 1 фаза B создает сильный северный полюс вверху слева и сильный южный полюс внизу справа. А-фаза создает более слабый северный полюс внизу слева и более слабый южный полюс внизу. C-фаза создает общее магнитное поле с северным полюсом в левом верхнем углу и южным полюсом в правом нижнем углу.
В Позиции 2 фаза А создает сильный северный полюс внизу слева и сильный южный полюс вверху справа; таким образом, сильные полюса повернулись на 60 [градусов] против часовой стрелки. (Обратите внимание, что это магнитное вращение на 60 [градусов] точно соответствует электрическому изменению фазных токов на 60 [градусов].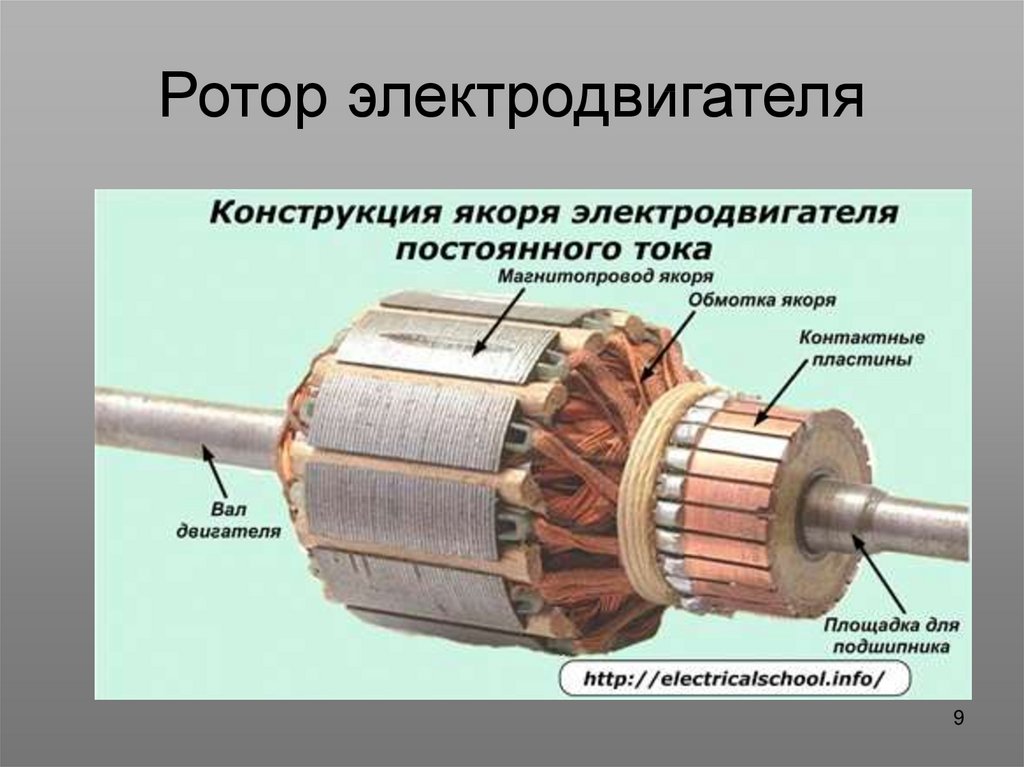 ) Слабые полюса также повернулись на 60 [градусов] против часовой стрелки. Фактически это означает, что общее магнитное поле повернулось на 60 [градусов] от положения 1. фаз изменяется более чем на 60 электрических градусов. Анализ позиций 3, 4, 5 и 6 показывает, что магнитное поле продолжает вращаться.
) Слабые полюса также повернулись на 60 [градусов] против часовой стрелки. Фактически это означает, что общее магнитное поле повернулось на 60 [градусов] от положения 1. фаз изменяется более чем на 60 электрических градусов. Анализ позиций 3, 4, 5 и 6 показывает, что магнитное поле продолжает вращаться.
Скорость, с которой вращается магнитное поле, называется синхронной скоростью и описывается следующим уравнением:
S = (f x P) / 120, где S = скорость вращения в оборотах в минуту f = частота подаваемого напряжения (Гц ) P = число магнитных полюсов во вращающемся магнитном поле
Если бы в этот статор был помещен постоянный магнит с валом, который позволял бы ему вращаться, его толкали бы (или тянули) вперед с синхронной скоростью. Точно так же работает синхронный двигатель, за исключением того, что магнитное поле ротора (поля) создается электромагнетизмом, а не постоянным магнитом.
Ротор асинхронного двигателя состоит из короткозамкнутых обмоток, и в обмотках ротора индуцируется ток, когда вращающееся магнитное поле пересекает их. Этот ток создает поле, противодействующее вращающемуся полю. В результате ротор толкается (или притягивается) вращающимся полем. Обратите внимание, что ротор асинхронного двигателя не может вращаться с синхронной скоростью, поскольку вращающееся поле должно прорезать обмотки ротора, чтобы создать крутящий момент. Разница между синхронной скоростью и фактической скоростью вращения ротора называется процентным скольжением; она выражается в процентах.
Этот ток создает поле, противодействующее вращающемуся полю. В результате ротор толкается (или притягивается) вращающимся полем. Обратите внимание, что ротор асинхронного двигателя не может вращаться с синхронной скоростью, поскольку вращающееся поле должно прорезать обмотки ротора, чтобы создать крутящий момент. Разница между синхронной скоростью и фактической скоростью вращения ротора называется процентным скольжением; она выражается в процентах.
Однофазные двигатели также имеют вращающееся магнитное поле. Вращающееся поле, необходимое для запуска двигателя, создается второй обмоткой, называемой пусковой обмоткой. После разгона двигателя пусковая обмотка отключается, и вращающееся поле создается за счет взаимодействия основной обмотки статора и ротора.
Вопрос № 5: Как работает асинхронный генератор?
Асинхронный генератор по конструкции идентичен асинхронному двигателю. Обмотки статора подключены к трехфазной системе питания, и три фазы создают вращающееся магнитное поле. Ротор асинхронного генератора вращается первичным двигателем, который вращается быстрее синхронной скорости. Когда обмотки ротора пересекают вращающееся поле, в них индуцируется ток. Этот индуцированный ток создает поле, которое, в свою очередь, прорезает обмотки статора, создавая выходную мощность для нагрузки.
Ротор асинхронного генератора вращается первичным двигателем, который вращается быстрее синхронной скорости. Когда обмотки ротора пересекают вращающееся поле, в них индуцируется ток. Этот индуцированный ток создает поле, которое, в свою очередь, прорезает обмотки статора, создавая выходную мощность для нагрузки.
Таким образом, асинхронный генератор получает питание от энергосистемы, к которой он подключен. Асинхронный двигатель должен иметь синхронные генераторы, подключенные к его статору, чтобы начать генерировать. После того, как асинхронный генератор работает, конденсаторы могут использоваться для питания возбуждения.
Вопрос № 6: Почему подшипники генератора и двигателя изолированы?
Магнитное поле внутри двигателя или генератора не совсем однородно. Таким образом, при вращении ротора на валу в продольном направлении (непосредственно вдоль вала) возникает напряжение. Это напряжение вызовет протекание микротоков через смазочную пленку на подшипниках. Эти токи, в свою очередь, могут вызвать незначительное искрение, нагрев и, в конечном итоге, выход из строя подшипника. Чем больше машина, тем хуже становится проблема.
Чем больше машина, тем хуже становится проблема.
Чтобы избежать этой проблемы, корпус подшипника со стороны ротора часто изолируется от стороны статора. В большинстве случаев будет изолирован по крайней мере один подшипник, обычно самый дальний от первичного двигателя для генераторов и самый дальний от нагрузки для двигателей. Иногда оба подшипника изолированы.
Вопрос № 7: Как генераторы переменного тока регулируют переменную, напряжение и мощность?
Хотя элементы управления генератором взаимодействуют, верны следующие общие положения.
- Выходная мощность генератора контролируется его первичным двигателем.
- Вклад напряжения и/или реактивной мощности генератора контролируется уровнем тока возбуждения.
Например, предположим, что к выходу генератора подключена дополнительная нагрузка. Добавленный поток тока увеличит силу магнитного поля якоря и заставит генератор замедлиться. Чтобы поддерживать частоту, регулятор генератора увеличивает мощность, подводимую к первичному двигателю.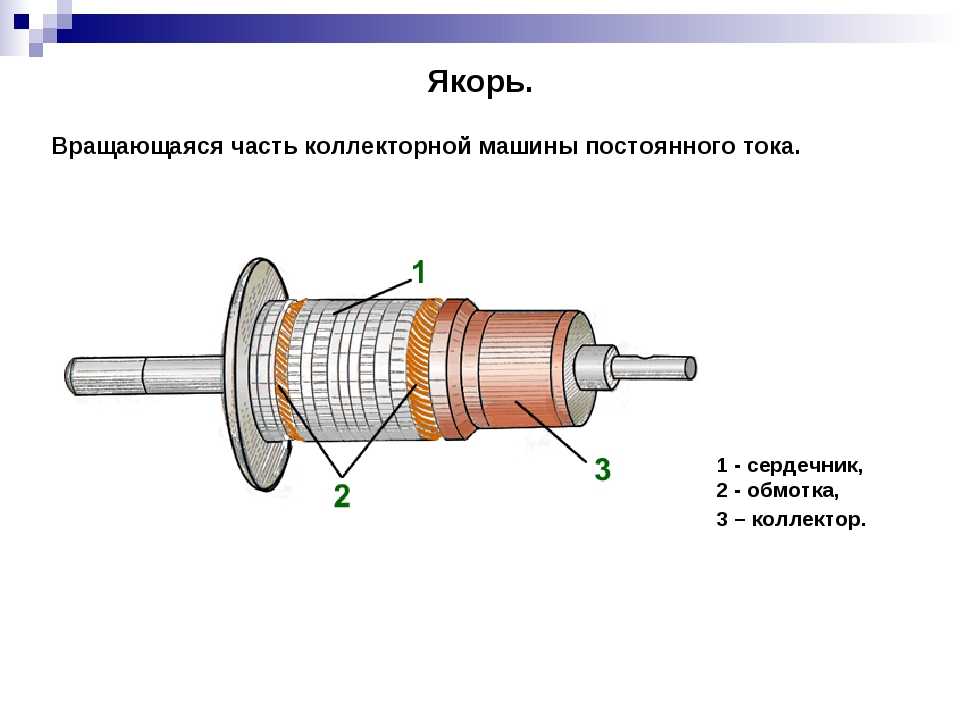 Таким образом, дополнительная мощность, необходимая для генератора, регулируется вводом первичного двигателя.
Таким образом, дополнительная мощность, необходимая для генератора, регулируется вводом первичного двигателя.
В нашем примере чистый магнитный поток в воздушном зазоре уменьшится, так как увеличение якоря противодействует потоку поля. Если не увеличить поток поля, чтобы компенсировать это изменение, выходное напряжение генератора уменьшится. Таким образом, ток возбуждения используется для управления выходным напряжением.
Давайте посмотрим на другой пример для дальнейшего пояснения. Предположим, к нашему генератору добавлена дополнительная нагрузка VAR. В этом случае выходной ток генератора снова возрастет. Однако, поскольку новая нагрузка не является «настоящей» мощностью, первичный двигатель необходимо увеличивать только настолько, чтобы компенсировать дополнительное падение IR, создаваемое дополнительным током.
В качестве последнего примера предположим, что у нас есть два или более генераторов, работающих параллельно и питающих нагрузку. Генератор 1 (G1) несет всю нагрузку (активную и реактивную), в то время как Генератор 2 (G2) работает с нулевой мощностью и нулевой реактивной мощностью. Если оператор G2 открывает дроссельную заслонку первичного двигателя, G2 начинает подавать ватты в систему. Поскольку подключенная нагрузка не изменилась, оба генератора увеличат скорость, если G1 не снизится.
Если оператор G2 открывает дроссельную заслонку первичного двигателя, G2 начинает подавать ватты в систему. Поскольку подключенная нагрузка не изменилась, оба генератора увеличат скорость, если G1 не снизится.
Поскольку G2 берет на себя дополнительную долю нагрузки, ему требуется повышенный поток поля. Если оператор G2 не увеличивает поле G2, G2 будет получать дополнительное возбуждение от G1, требуя, чтобы G1 увеличил уровень своего возбуждения. Если ни G1, ни G2 не увеличат уровень возбуждения, общее напряжение системы упадет.
Джон Кадик, ЧП является президентом Cadick Professional Services, Гарленд, Техас, международной ассоциации электрических испытаний. (NETA) член.
Якорь и ротор одинаковы? — Словарь
Таким образом, ротор состоит из магнита возбуждения, который вращается, в то время как ротор остается неподвижным , а с другой стороны якорь несет ток и является неподвижным и является частью статора.
Просто так Любительство означает любовь? причастие прошедшего времени от amer «любить», от латинского amare «любить, быть влюблен в с; находить удовольствие в», прото-итал. дилетантский (прил.) «имеющий недостатки и недостатки непрофессионала», 1863 г.; от любительского +-иш.
дилетантский (прил.) «имеющий недостатки и недостатки непрофессионала», 1863 г.; от любительского +-иш.
Является ли якорь статором? В большинстве генераторов магнит возбуждения вращается и является частью ротора, тогда как якорь неподвижен и является частью статора . И двигатели, и генераторы могут быть построены либо с неподвижным якорем и вращающимся полем, либо с вращающимся якорем и неподвижным полем.
также Имеет ли двигатель переменного тока якорь? В двигателях переменного и постоянного тока используется тот же принцип использования обмотки якоря и магнитного поля, за исключением того, что в двигателях постоянного тока якорь вращается, а магнитное поле не вращается. В двигателях переменного тока якорь не вращается и магнитное поле постоянно вращается .
Какой тип ротора используется в машине постоянного тока?
Ротор содержит витков катушки , которые питаются от постоянного тока, а статор содержит либо постоянные магниты, либо электромагнитные обмотки. Когда двигатель питается от постоянного тока, внутри статора создается магнитное поле, притягивающее и отталкивающее магниты на роторе.
Когда двигатель питается от постоянного тока, внутри статора создается магнитное поле, притягивающее и отталкивающее магниты на роторе.
Является ли любительское оскорблением? Называть себя «любителем» означает скорее непрофессионально, чем непрофессионально. Используется как критика или оскорбление по поводу подхода человека к своей работе .
Как сделать любителя?
Что означает amatuer на латыни? «Любитель» происходит от «amatore», что на латыни означает « любовник ». Это означает «тот, кто делает что-то из любви, а не денег» или «кто-то, движимый любовью, а не деньгами».
Как делают арматуру?
Сердечник арматуры состоит из ламинированных тонких металлических пластин вместо цельного куска. Толщина ламинатов зависит от частоты питания. Его толщина составляет примерно 0,5 мм.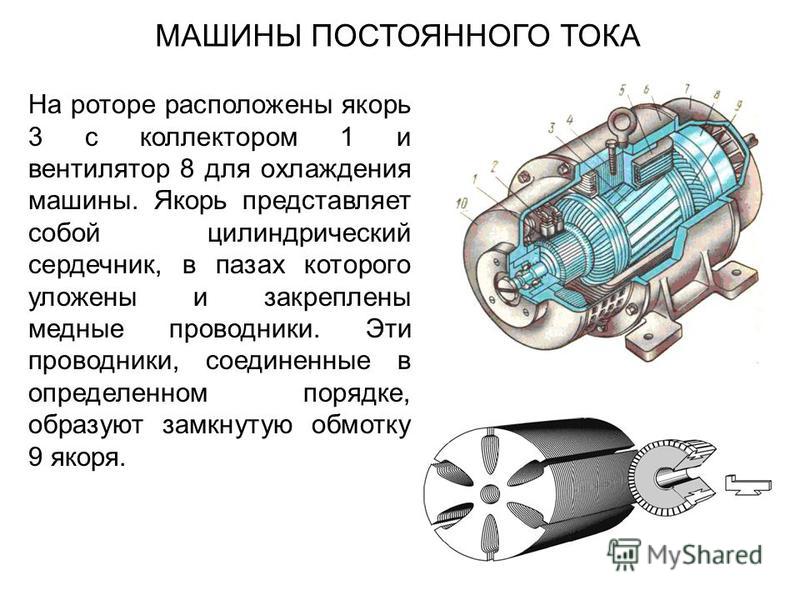 Многослойная кремнистая сталь используется для сердечника якоря, чтобы уменьшить потери на вихревые токи и гистерезис.
Многослойная кремнистая сталь используется для сердечника якоря, чтобы уменьшить потери на вихревые токи и гистерезис.
Почему сохраняется арматура? В генераторе переменного тока обмотка якоря остается неподвижной , в то время как обмотка возбуждения продолжает вращаться по следующим причинам: 1. Якорь выдерживает очень большой ток и высокое напряжение. … Изготовление якоря с глубокими пазами для размещения больших катушек несложно, если якорь остается неподвижным.
В чем разница между якорем и обмоткой возбуждения?
Обмотка якоря — обмотка, в которой индуцируется напряжение. Обмотка возбуждения — это обмотка, в которой создается основной поток поля при прохождении тока через обмотку.
Как отличить двигатели переменного и постоянного тока? Ищите конструкцию сердечника статора и ротор . Если коммутатора нет, то это двигатель переменного тока. Если есть коллектор и щетки, то это может быть как двигатель постоянного тока, так и коллекторный двигатель переменного тока (универсальный двигатель).
Где находится якорь в двигателе?
В двигателе постоянного тока витки проволоки установлены в пазах на цилиндре из ферромагнитного материала, который называется якорем. Якорь установлен на подшипниках и может свободно вращаться. Он установлен в магнитном поле, создаваемом постоянными магнитами или током, проходящим через катушки проволоки, которые называются катушками возбуждения.
Узнать больше.
Что такое обмотка якоря двигателя?
Обмотка якоря — это обмотка, в которой индуцируется напряжение . Обмотка возбуждения — это обмотка, в которой создается основной поток поля при прохождении тока через обмотку.
Каков принцип работы ротора? Принцип работы
Цепь ротора закорочена, и в проводниках ротора течет ток . Действие вращающегося потока и тока создает силу, которая создает крутящий момент для запуска двигателя. Ротор генератора состоит из проволочной катушки, обернутой вокруг железного сердечника.
Что такое крутящий момент ротора? Крутящий момент при заторможенном роторе равен минимальному крутящему моменту, который двигатель будет развивать при номинальном напряжении и частоте .
Что такое скорость ротора?
Роторное вращение
Скорость ротора обычно находится в диапазоне 120–210 м/с , но в основном между 150 и 190 м/с, с тенденцией быть выше при меньшем диаметре ротора [6]. В настоящее время наименьший диаметр ротора, используемый в промышленности, составляет 28 мм со скоростью вращения ротора до 150 000 об/мин, хотя некоторые машины могут достигать 160 000 об/мин.
Кто такой любитель? 1 : лицо , занимающееся спортом или занятиями ради удовольствия , а не за плату . 2 : человек, который принимает участие в чем-либо, не имея в этом опыта или навыков. Другие слова от любителя. любительский ˌam-ə-ˈtər-ish , -ˈchər- прилагательное актер-любитель.
Что такое профессиональный и любительский?
Любители сосредотачиваются на краткосрочной перспективе . Профессионалы ориентируются на долгосрочную перспективу. Любители сосредотачиваются на том, чтобы снести других людей. Профессионалы стараются сделать всех лучше.