
Правило поднятой руки, или Тренинги, которые помогают подросткам (Анастастия Левшина)
809 ₽
599 ₽
+ до 121 балла
Бонусная программа
Итоговая сумма бонусов может отличаться от указанной, если к заказу будут применены скидки.
Купить
Цена на сайте может отличаться от цены в магазинах сети. Внешний вид книги может отличаться от изображения на сайте.
В наличии 2 шт
В наличии в 93 магазинах. Смотреть на карте
2
Цена на сайте может отличаться от цены в магазинах сети. Внешний вид книги может отличаться от изображения на сайте.
Представленные в пособии тренинги затрагивают различные аспекты социальной психологии: тендерная и профессиональная идентичность, толерантность личности, психология конфликта, проблемы взаимодействия с окружающей средой, близкими людьми и собственными временными ресурсами.
В пособии представлены программы тренингов, которые были разработаны и апробированы в ходе реализации авторского проекта «Шаг в психологию», ставшего лауреатом Национального профессионального конкурса «Золотая Психея».
Учебно-методическое пособие адресовано психологам, педагогам, вожатым.
Описание
Характеристики
Представленные в пособии тренинги затрагивают различные аспекты социальной психологии: тендерная и профессиональная идентичность, толерантность личности, психология конфликта, проблемы взаимодействия с окружающей средой, близкими людьми и собственными временными ресурсами. Все темы объединены целевой аудиторией тренингов — подростками и молодежью.
В пособии представлены программы тренингов, которые были разработаны и апробированы в ходе реализации авторского проекта «Шаг в психологию», ставшего лауреатом Национального профессионального конкурса «Золотая Психея».

Феникс
На товар пока нет отзывов
Поделитесь своим мнением раньше всех
Как получить бонусы за отзыв о товаре
1
Сделайте заказ в интернет-магазине
2
Напишите развёрнутый отзыв от 300 символов только на то, что вы купили
3
Дождитесь, пока отзыв опубликуют.
Если он окажется среди первых десяти, вы получите 30 бонусов на Карту Любимого Покупателя. Можно писать неограниченное количество отзывов к разным покупкам – мы начислим бонусы за каждый, опубликованный в первой десятке.
Правила начисления бонусов
Если он окажется среди первых десяти, вы получите 30 бонусов на Карту Любимого Покупателя.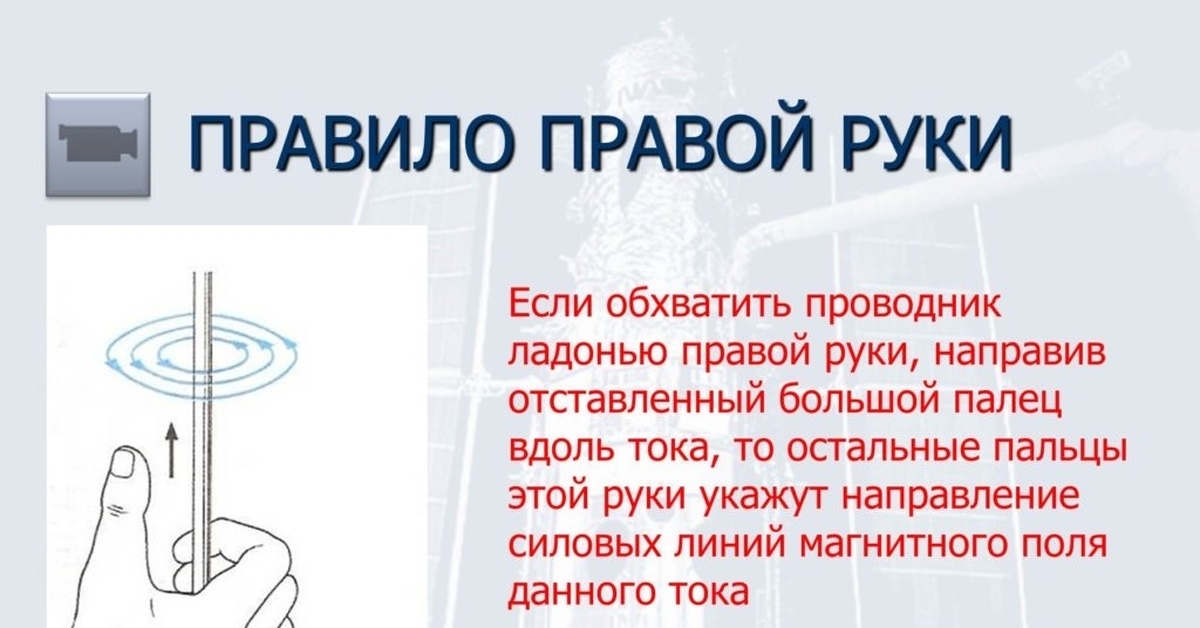 Можно писать
неограниченное количество отзывов к разным покупкам – мы начислим бонусы за каждый, опубликованный в
первой десятке.
Можно писать
неограниченное количество отзывов к разным покупкам – мы начислим бонусы за каждый, опубликованный в
первой десятке.
Правила начисления бонусов
Книга «Правило поднятой руки, или Тренинги, которые помогают подросткам» есть в наличии в интернет-магазине «Читай-город» по привлекательной цене. Если вы находитесь в Москве, Санкт-Петербурге, Нижнем Новгороде, Казани, Екатеринбурге, Ростове-на-Дону или любом другом регионе России, вы можете оформить заказ на книгу Анастастия Левшина «Правило поднятой руки, или Тренинги, которые помогают подросткам» и выбрать удобный способ его получения: самовывоз, доставка курьером или отправка почтой. Чтобы покупать книги вам было ещё приятнее, мы регулярно проводим акции и конкурсы.
Правило правой руки
🏠 |Образование | Физика | 11 класс |
Сила Лоренца.
Вводные замечания
Правило правой руки обычно применяется школьниками для того, чтобы определить
куда будет
отклоняться заряженная частица, движущаяся в магнитном поле.
Сила, которая отклоняет такие частицы, называется силой Лоренца
Величина силы Лоренца вычисляется в школе по формуле
F = q ⋅ v ⨯ B
B — вектор магнитной индукции
v — скорость движения частицы
q — заряд частицы
⨯ — это векторное произведение.
После умножения заряда на скорость и индукцию мы получаем силу Лоренца. Её величину можно посчитать на калькуляторе просто перемножив остальные величины друг на друга.
Любая сила — это вектор, следовательно, у силы есть не только величина, но и направление.
Направление любого векторного произведения можно легко найти зная направления множителей.
Для этого и нужно правило правой руки.
И как Вы могли догадаться, оно может применяться не только к силе Лоренца, но и к любым другим векторным произведениям.
Необходимые знания
Прежде чем знакомиться с правилом правой руки, нужно усвоить как определяется направление электрического тока.
Электроны и отрицательно заряженные ионы движутся от катода к аноду.
Протоны, дырки и положительно заряженные ионы движутся в обратном направлении — от анода к катоду.За направление электрического тока принято направление противоположное тому, в котором движутся электроны.
Правило правой руки обозначается следующим образом:
Направление, в котором частица отклонится от первоначальной траектории под действием магнитного поля зависит от заряда частицы.
Направление силы Лоренца
Направление силы Лоренца обозначено коричневой стрелкой. Сама сила обозначена как F. Синим цветом обозначена траектория движения отрицательно заряженных частиц при условии, что:
- Отрицательно заряженная частица изначально летела слева направо
- Вектор индукции магнитного поля направлен из экрана
Красным цветом обозначена траектория движения положительно
заряженной частицы при выполнении тех же условий.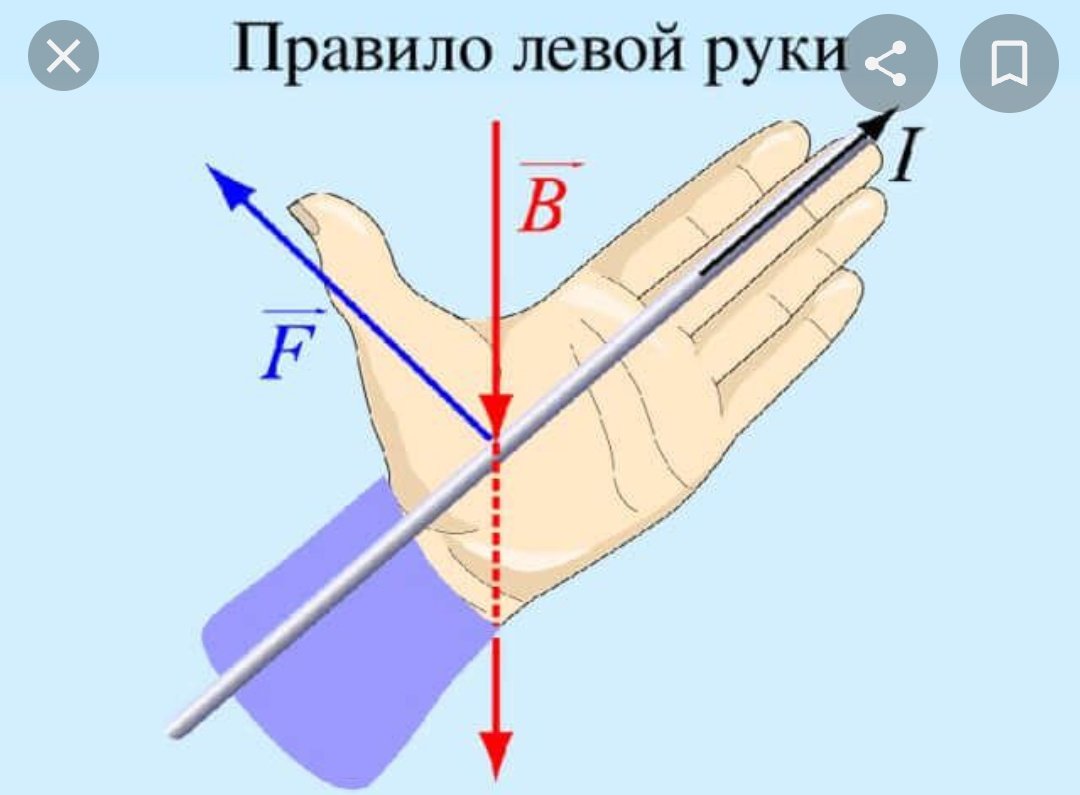
Прямой чёрной линией обозначается движение частицы не имеющей заряда. На неё магнитное поле не действует и она как двигалась слева направо так и двигается.
| 6 класс | 7 класс |
| 8 класс | 9 класс |
| ОГЭ (ГИА за 9-й класс) | 10 класс |
| 11 класс | ЕГЭ |
| Словарь по физике | Полезные ссылки |
- Поиск по сайту
- aofeed — Telegram канал чтобы следить за выходом новых статей
- aofeedchat — задать вопрос в Телеграм-группе
| Рекомендую наш хостинг beget.ru |
| Пишите на [email protected] если Вы: |
| 1. Хотите написать статью для нашего сайта или перевести статью на свой родной язык. |
2. Хотите разместить на сайте рекламу, подходящуюю по тематике. Хотите разместить на сайте рекламу, подходящуюю по тематике. |
| 3. Реклама на моём сайте имеет максимальный уровень цензуры. Если Вы увидели рекламный блок недопустимый для просмотра детьми школьного возраста, вызывающий шок или вводящий в заблуждение — пожалуйста свяжитесь с нами по электронной почте |
| 4. Нашли на сайте ошибку, неточности, баг и т.д. … ……. |
| 5. Статьи можно расшарить в соцсетях, нажав на иконку сети: |
Управление верхними пределами затрат на обеспечение безопасности
Во время выступления на конференции CAMP IT на прошлой неделе я провел ряд бесед с участниками о правилах рук и затратах на обеспечение безопасности. В HALOCK Security Labs мы много говорим о правиле рук. Также известный как исчисление небрежности, это способ, с помощью которого организация может математически оценить, насколько «разумными» будут инвестиции для предотвращения риска угрозы. Вкратце, правило руки гласит, что если бремя снижения риска меньше, чем вероятность риска, умноженная на его воздействие, то бремя разумно.
Вкратце, правило руки гласит, что если бремя снижения риска меньше, чем вероятность риска, умноженная на его воздействие, то бремя разумно.
Подумай об этом так. Если женщина владеет магазином с тротуаром перед входом, а на дворе бушует метель, она может подумать, что хорошей идеей будет перелопатить тротуар и посыпать землю солью, чтобы тротуар был безопасным для прохожих. как и ее клиенты. Наем человека для расчистки тротуара обходится ей в 40 долларов на время шторма.
Владелец нашего магазина считает, что если она не наймет этого человека, то в какой-то момент в течение дня кто-то может упасть и пораниться, что приведет к оплате медицинских счетов на тысячу долларов или больше. В этом случае ее расчет небрежности выглядел бы примерно так: «Стоимость сорока долларов в день меньше, чем 1000 долларов в день, когда может произойти травма, поэтому разумно заплатить сорок долларов». Перефразируя судью Хэнда, «бремя меньше, чем вероятность, умноженная на стоимость травмы (или «B < PL»).
Правило руки подверглось тщательному анализу и нечасто используется в случаях небрежности, но для специалистов по информационной безопасности и соблюдению правил это очень достойная математика. Правила, которые требуют от нас защиты личной информации, требуют от нас проведения оценки рисков, а методология оценки рисков, которую предоставляет нам правительство США (Специальная публикация NIST 800-30), дает нам поразительно похожие расчеты рисков; Риск = Воздействие * Вероятность.
Рассматривайте реестр рисков как таблицу столбцов и строк. В столбцах перечисляются факторы риска, которые NIST SP 800-30 требует от нас учитывать; информационный актив, его элементы управления, его уязвимости, предсказуемые угрозы, а затем вероятность, воздействие и расчетный риск, возникающие в результате угрозы. Синие столбцы слева представляют наш расчет риска Риск = Вероятность x Воздействие.
Затем справа есть еще несколько столбцов зеленого цвета. В этих столбцах перечислены средства контроля, которые мы могли бы внедрить, чтобы снизить риски до разумного уровня. Они представляют собой правило руки, напоминая нам, что если бремя снижения риска стоит меньше, чем воздействие, которое оно пытается устранить, то у нас есть разумный контроль над обработкой риска.
Они представляют собой правило руки, напоминая нам, что если бремя снижения риска стоит меньше, чем воздействие, которое оно пытается устранить, то у нас есть разумный контроль над обработкой риска.
Конечно, у этого исчисления есть ограничения. Во-первых, разумность основывается не только на соображениях стоимости, но и на том, насколько хорошо бремя (инвестиции в обработку рисков) снижает риски до разумного и надлежащего уровня. Таким образом, стоимость бремени представляет собой верхний предел разумной обработки риска, в то время как эффективность контроля представляет собой его нижний предел. (О том, как рассчитывается этот нижний предел, я расскажу позже в блоге.)
Но подумайте о дополнительных возможностях, которые вы получаете, когда проводите оценку риска с учетом правила руки. Когда от вас требуется необычный или кажущийся необоснованным контроль, и ваша оценка риска используется для определения того, является ли этот контроль разумным, вы можете эффективно отсеять те рекомендации, которые являются слишком дорогостоящими.
Таким образом, в то время как мир судебных разбирательств борется с ограничениями правила руки, мир соответствия может найти в нем огромную ценность. Правила безопасности HIPAA, Gramm Leach Bliley, Федеральная торговая комиссия и Massachusetts 201 CMR 17.00 (среди прочих) говорят нам, что мы должны проводить оценку рисков, чтобы определить разумные и надлежащие уровни контроля безопасности. Когда федеральное правительство предоставляет нам уравнение риска Риск = Вероятность х Воздействие для расчета этого риска и говорит нам, что наши инвестиции должны довести эти уровни риска до «разумного уровня», тогда у нас есть задатки веских оснований для того, чтобы не тратить слишком много, чтобы устранить какой-либо один риск.
Теперь, когда мы увидели, как оценка риска может помочь нам установить верхние пределы «разумного контроля», я в своем следующем блоге опишу, как можно рассчитать нижние пределы «разумного контроля».
3.1 Правило правой руки – инженерная механика: статика
Глава 3: Основы твердого тела
Прежде чем мы сможем анализировать твердые тела, нам нужно научиться небольшому трюку, который поможет нам с перекрестным произведением, называемым «правилом правой руки».
Это называется право-ортогональной системой. Часть « ортогональная» означает, что все три оси перпендикулярны друг другу, а часть « правая» означает, что [латекс]\underline{\шляпа{i}}\times\underline{\шляпа{j }}=\underline{\hat{k}}[/latex], отсюда и правило правой руки. Помните их из раздела 1.5?
- [латекс]\underline{\шляпа{i}}\times\underline{\шляпа{j}}=\underline{\шляпа{k}}[/латекс]
- [латекс] \ подчеркивание {\ шляпа {j}} \ раз \ подчеркивание {\ шляпа {k}} = \ подчеркивание {\ шляпа {i}} [/ латекс]
- [латекс] \ подчеркивание {\ шляпа {k}} \ раз \ подчеркивание {\ шляпа {i}} = \ подчеркивание {\ шляпа {j}} [/ латекс]
- [латекс] \ подчеркивание {\ шляпа {j}} \ раз \ подчеркивание {\ шляпа {i}} = — \ подчеркивание {\ шляпа {k}} [/ латекс]
- [латекс] \ подчеркивание {\ шляпа {k}} \ раз \ подчеркивание {\ шляпа {j}} = — \ подчеркивание {\ шляпа {i}} [/ латекс]
- [латекс] \ подчеркивание {\ шляпа {i}} \ раз \ подчеркивание {\ шляпа {k}} = — \ подчеркивание {\ шляпа {j}} [/ латекс]
Противоположностью право-ортогональной системе является лево-ортогональная система, где [/латекс]. Мы такой не используем!
Мы такой не используем!
Существует два способа выполнения правила правой руки, и они требуют практики для концептуального понимания, но это значительно ускорит решение проблем. Вы собираетесь использовать свои пальцы и большой палец для представления осей x, y и z.
В следующем описании A x B = C, поэтому для системы координат X x Y = Z ([латекс]\underline{\hat{i}}\times\underline{\hat{j}}=\underline {\шляпа{к}}[/латекс]). Ваши пальцы идут в направлении X, затем вы сгибаете их на 90 градусов, указывая на Y, а большой палец — в направлении Z.
Направление вектора векторного произведения A x B определяется правилом правой руки для векторного произведения двух векторов. Чтобы применить это правило правой руки, вытяните пальцы правой руки так, чтобы они были направлены прямо в сторону от правого локтя. Вытяните большой палец так, чтобы он находился под прямым углом к вашим пальцам.
Удерживая пальцы на одном уровне с предплечьем, направьте их в направлении первого вектора (того, который стоит перед знаком «×» в математическом выражении векторного произведения, например, A в A x B ).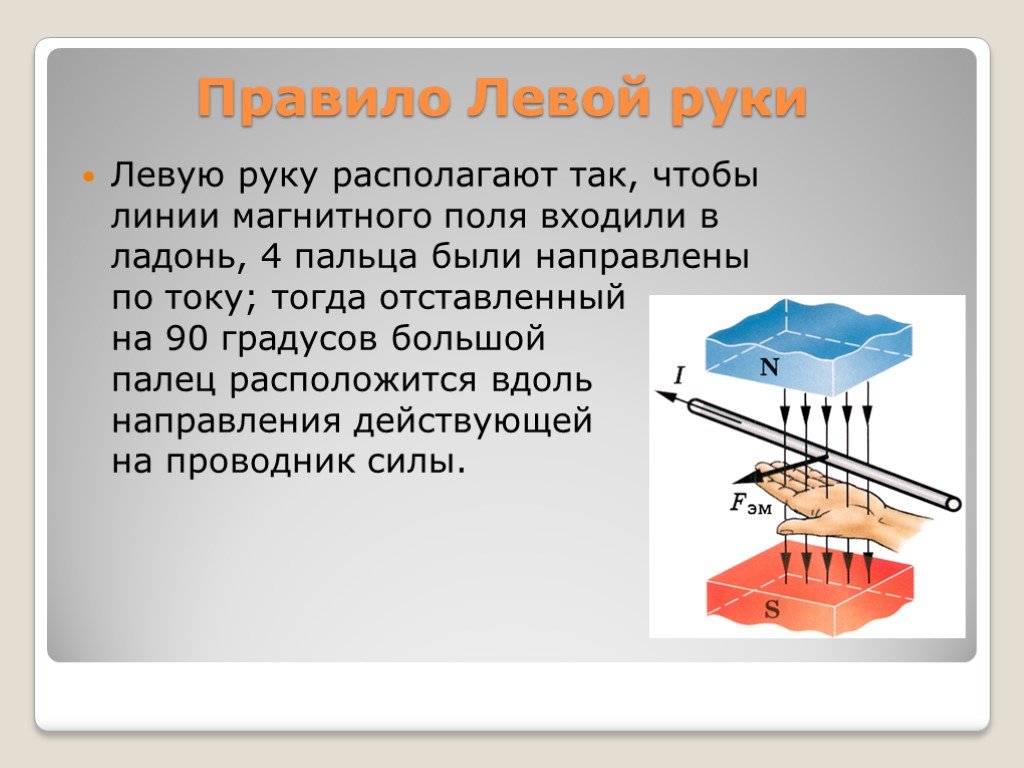
Теперь по мере необходимости поворачивайте руку вокруг воображаемой оси, проходящей вдоль предплечья и вдоль среднего пальца, пока ваша рука не будет ориентирована так, что, если вы сомкнете пальцы, они укажут в направлении второй вектор.
Теперь ваш большой палец указывает в направлении вектора векторного произведения. C = A x B. Вектор векторного произведения C всегда перпендикулярен обоим векторам, входящим в векторное произведение (A и B в данном случае). Следовательно, если вы нарисуете их так, чтобы оба вектора векторного произведения находились в плоскости страницы, вектор векторного произведения всегда будет перпендикулярен странице, либо прямо на странице, либо прямо вне страницы. . В данном случае это прямо со страницы.
Когда мы используем перекрестное произведение для расчета крутящего момента, вызванного силой F, точка приложения которой имеет вектор положения r относительно точки, относительно которой мы вычисляем крутящий момент, мы получаем осевой вектор крутящего момента τ.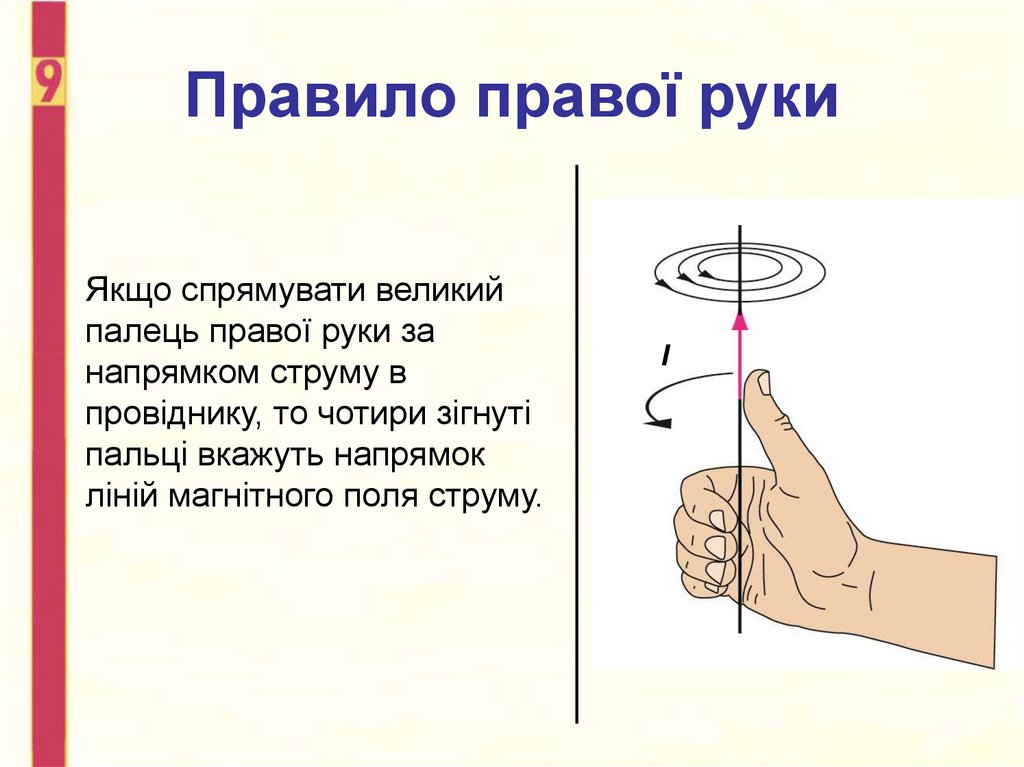 Чтобы определить направление вращения, которому будет соответствовать такой вектор крутящего момента, относительно оси, определяемой самим вектором крутящего момента, мы используем Правило правой руки для чего-то вьющегося чего-то прямого. Обратите внимание, что мы рассчитываем крутящий момент относительно точки, а не оси — ось, вокруг которой действует крутящий момент, выходит в ответе.
Чтобы определить направление вращения, которому будет соответствовать такой вектор крутящего момента, относительно оси, определяемой самим вектором крутящего момента, мы используем Правило правой руки для чего-то вьющегося чего-то прямого. Обратите внимание, что мы рассчитываем крутящий момент относительно точки, а не оси — ось, вокруг которой действует крутящий момент, выходит в ответе.
Источник: Джеффри В. Шник https://openlibrary.ecampusontario.ca/catalogue/item/?id=ce74a181-ccde-491c-848d-05489ed182e7 страницы 135–137
Самая сложная часть правила правой руки — это представить различные оси и представить, как они перпендикулярны друг другу.
Попробуйте это в 2D и 3D. Представьте (или нарисуйте) символы прямого угла (Ответ будет через несколько шагов)
Пример 1:Используя эти x и y, воспользуемся правилом правой руки, чтобы найти направление z.
Вот шаги, которые вы можете выполнить:
Пример 2:
Иногда вам нужно будет повернуть руку на 180 градусов, чтобы определить, в каком направлении можно указывать пальцами в направлении Y, например:
Пример 3:
Важно, чтобы вы могли представить, как оси перпендикулярны. Теперь попрактикуйтесь в использовании правила правой руки, если вы пытаетесь найти x.
Теперь попрактикуйтесь в использовании правила правой руки, если вы пытаетесь найти x.
Твоя очередь!
Продолжайте работать с этими примерами. Правила остаются прежними: большой палец по направлению к z, согнутые пальцы по направлению к y, вытянутые пальцы по направлению к x. Найдите недостающую ось:
.
.
Ты сделал это?
.
.
.
Вот ответы:
.
.
Третий способ расчета крутящего момента, упомянутый в разделе 1.6, заключается в использовании правила правой руки для определения оси вращения. Первый способ (скалярный метод) использует | М | = | р | | Ф | sin Θ, и часто угол между вектором положения и силой составляет 90 градусов. Векторный метод предназначен для более сложных ситуаций и использует векторное произведение r x F = M .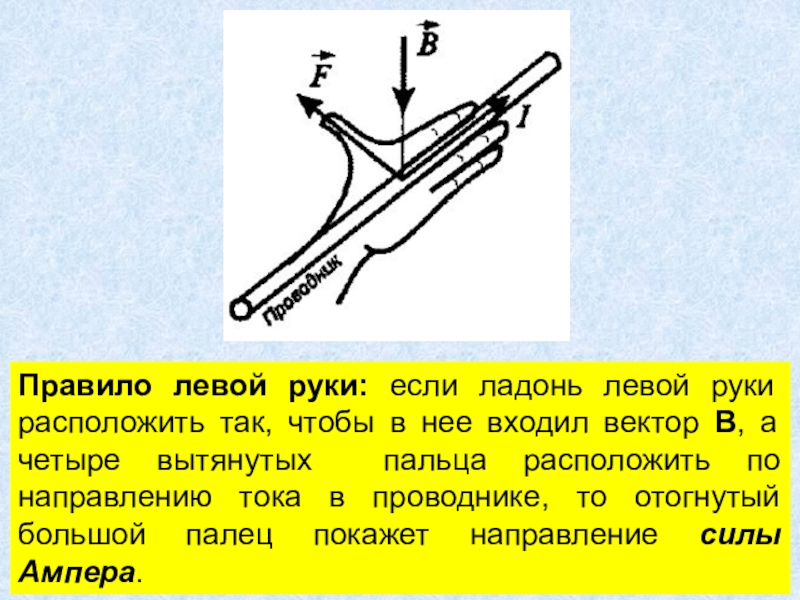 Третий метод находит скалярное значение отдельно, а затем использует правило правой руки для определения направления (положительного или отрицательного вдоль третьей оси).
Третий метод находит скалярное значение отдельно, а затем использует правило правой руки для определения направления (положительного или отрицательного вдоль третьей оси).
- Укажите пальцами в направлении перпендикулярная часть вектора положения r (как для x)
- Сверните их в направлении вектора Силы F (как для y)
- Ваш большой палец указывает направление момента M , возникающего в результате действия силы (как для z)
Следующее поможет вам понять, что подразумевается под: перпендикулярной частью вектора положения:
Крутящий момент τ может быть выражен как векторное произведение вектора положения r для точки приложения силы и вектора силы F : r x F = M
Прежде чем мы начнем наше математическое обсуждение того, что мы подразумеваем под перекрестным произведением, несколько слов о векторе r . Для вас важно уметь различать вектор положения r для силы и плечо момента, поэтому мы представляем их ниже на одной диаграмме. Мы используем тот же пример, что и раньше:
Для вас важно уметь различать вектор положения r для силы и плечо момента, поэтому мы представляем их ниже на одной диаграмме. Мы используем тот же пример, что и раньше:
, в котором мы смотрим прямо вдоль оси вращения (поэтому она выглядит как точка), а сила лежит в плоскости, перпендикулярной этой оси вращения. Мы используем соглашение о диаграммах, согласно которому точка, в которой сила приложена к твердому телу, — это точка, в которой один конец стрелки на диаграмме касается твердого тела. Теперь добавим на диаграмму линию действия силы и плечо момента r⊥, а также вектор положения r точки приложения силы.
Плечо момента фактически может быть определено через вектор положения точки приложения силы. Рассмотрим наклонную систему координат x-y, имеющую начало на оси вращения, с одной осью, параллельной линии действия силы, и одной осью, перпендикулярной линии действия силы. Мы обозначаем ось x ┴ как «перпендикулярную», а ось y || для «параллельного».
Теперь мы разобьем вектор положения r на составляющие его векторы по ┴ (перпендикуляру) и || (параллельные) оси.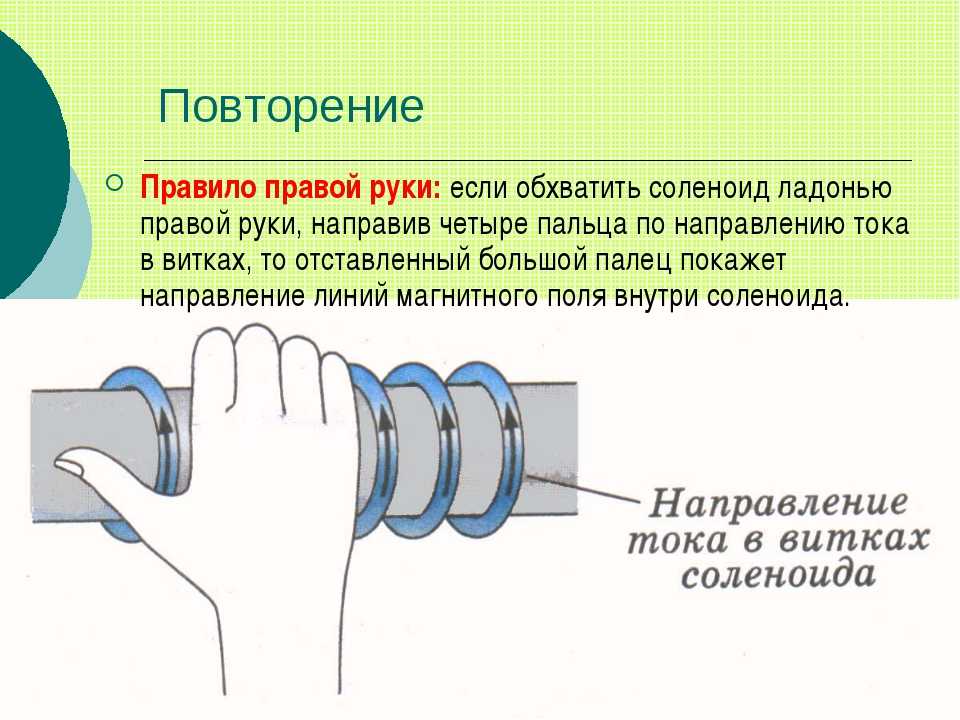
Из диаграммы видно, что плечо момента r является просто величиной вектора компоненты ┴ в направлении, перпендикулярном действию силы, вектора положения точки приложения силы.
Источник: Физика, основанная на исчислении, Джеффри В. Шник, https://openlibrary.ecampusontario.ca/catalogue/item/?id=ce74a181-ccde-491c-848d-05489ed182e7 страницы 132–137
В этом методе дважды используется правило правой руки, чтобы найти вектор. Сначала определить систему координат, а затем снова посмотреть, в каком направлении выровнен крутящий момент. Затем вы умножаете на величину перпендикулярной части вектора положения (r⊥ или «плечо момента») и на величину вектора силы. ):
|М| = +/- |r⊥| |Ф| [латекс]\шляпа{\подчеркивание{к}}[/латекс]
* , хотя это не всегда направление [латекс]\шляпа{\подчеркивание{к}}[/латекс], это может быть [латекс]\шляпа{\подчеркивание{i}}[/латекс] или [латекс]\ шляпа {\ подчеркивание {j}} [/ латекс]. Это зависит от того, как вы определяете свою систему координат.
Пример 4:
Если вам кажется, что сгибание пальцев слишком запутанно, вы можете попробовать этот метод, при котором большой, указательный и средний пальцы разводятся на 90 градусов. Ваш большой палец — это x, ваш указательный палец — это y, ваш средний палец — это z.
Для этого правой рукой совместите большой палец с первым вектором, а указательный — со вторым вектором. Перекрестное произведение будет указывать в направлении вашего среднего пальца (когда вы держите средний палец перпендикулярно двум другим пальцам). Это показано на рисунке A.14. Таким образом, вы часто можете не использовать уравнение A.1 и вместо этого использовать правило правой руки для определения направления векторного произведения и уравнение A.2, чтобы найти его величину.
Источник: Introductory Physics, Ryan Martin et al., https://openlibrary.ecampusontario.ca/catalogue/item/?id=4c3c2c75-0029-4c9e-967f-41f178bebbbb, стр. 823–825
«Кудрявый метод»
Для осевых векторов вы используете то, что я называю фигурным методом. Чтобы определить, является ли ось вращения положительной или отрицательной, согните пальцы в направлении вращения, и ваш большой палец покажет направление вращения, т. е. направление вращения вдоль положительной или отрицательной оси x, y или z. (Это предполагает, что у вас уже есть определенная система координат, чтобы увидеть, вокруг какой оси вращается колесо и в каком направлении).
Чтобы определить, является ли ось вращения положительной или отрицательной, согните пальцы в направлении вращения, и ваш большой палец покажет направление вращения, т. е. направление вращения вдоль положительной или отрицательной оси x, y или z. (Это предполагает, что у вас уже есть определенная система координат, чтобы увидеть, вокруг какой оси вращается колесо и в каком направлении).
Если колесо катится, то оно движется по оси. Согните пальцы в направлении вращения, и большой палец покажет направление вращения. [1]
В основном: Правило правой руки помогает нам соблюдать ориентацию осей x – y – z. Это следует правилу, что X x Y = Z. Используя пальцы и большой палец, есть два разных метода. Во-первых, направьте пальцы в направлении x, согните их в направлении y (возможно, вам придется перевернуть руку), а большой палец покажет направление z. Попытка скопировать это 3D-изображение на 2D-страницу может оказаться сложной задачей, но с практикой вы увидите прямые углы между нарисованными осями.