
Проверка работоспособности шим-контроллера.
Шим-контроллер считают «сердцем» источников питания, но предварительно нужно проверить и другие компоненты блока питания выполнив стандартную последовательность действий по ремонту блока питания (БП):
1) В выключенном состоянии источник внимательно осмотреть (особое внимание обратить на состояние всех электролитических конденсаторов — они не должны быть вздуты).
2) Проверить исправность предохранителя и элементов входного фильтра БП.
3) Прозвонить на короткое замыкание или обрыв диоды выпрямительного моста (эту операцию, как и многие другие, можно выполнить, не выпаивая диоды из платы). При этом в остальных случаях надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором (в подозрительных случаях, элемент схемы необходимо выпаивать и проверять отдельно).
4) Проверить исправность выходных цепей: электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов и диодных сборок.
5) Проверить силовые транзисторы высокочастотного преобразователя и транзисторов каскада управления. Обязательно проверить возвратные диоды, включенные параллельно электродам коллектор-эмиттер силовых транзисторов.
Эти действия, дают положительный результат в обнаружении только следствия неработоспособности всего блока, но причина неисправности в большинстве случаев находится гораздо глубже. Например, неисправность силовых транзисторов может быть следствием: неисправности цепей схемы защиты и контроля, нарушения цепи обратной связи, неисправности ШИМ-преобразователя, выхода из строя демпфирующих RC-цепочек или, межвитковый пробой в силовом трансформаторе. Поэтому, если удается найти неисправный элемент, то желательно пройти все этапы проверок, перечисленные выше (т. к. предохранитель сам по себе никогда не сгорает, а пробитый диод в выходном выпрямителе становится причиной «смерти» ещё и силовых транзисторов высокочастотного преобразователя).
В качестве шим-контроллера («сердца» источников питания) долгое время использовали микросхему TL494, а затем и ее аналоги (MB3759, KA7500B … KA3511, SG6105 и др.). Проверку работоспособности такой микросхемы, например, TL494 (рис. 1) можно произвести, не включая блок питания. При этом микросхему необходимо запитать от внешнего источника напряжением +9В..+20В. Напряжение подается на вывод 12 относительно выв. 7 — желательно через маломощный выпрямительный диод. Все измерения тоже должны проводиться относительно выв. 7. При подаче питания на микросхему контролируем напряжение на выв. 5. Оно должно быть +5В (±5%) и быть стабильным при изменении напряжения питания на выв. 12 В пределах +9В..+20В. В противном случае не исправен внутренний стабилизатор напряжения микросхемы. Далее осциллографом смотрим напряжение на выв. 5. Оно должно быть пилообразной формы амплитудой 3,2 В (рис. 2). Если сигнал отсутствует или иной формы, то проверить целостность конденсатора и резистора, подключенных к выв. 5 и выв. 6, соответственно. В случае исправности этих элементов микросхему необходимо заменить. После этого проверяем наличие управляющих сигналов на выходе микросхемы (выв. 8 и выв. 11). Они должны соответствовать осциллограммам, приведенным на рис. 2. Отсутствие этих сигналов так же говорит о неисправности микросхемы. В случае успешного прохождения испытаний микросхема считается исправной.
Рис. 1
Рис. 2
© 2010-2020 — ZIPSTORE.RU Запчасти и компоненты для торгового оборудования
Наш адрес: г. Москва, ул. Полярная, д. 31, стр. 1. Телефон: +7 495 649 16 77 (Skype, ICQ). Режим работы: понедельник — пятница с 9:00 до 18:00; суббота и воскресенье — выходной. Доставка по России, Белоруссии, Украине, Казахстану: Москва, Подольск, Сергиев Посад, Истра, Рязань, Курск, Липецк, Тула, Иваново, Воронеж, Ярославль, Тверь, Смоленск, Калуга, Белгород, Орел, Тамбов, Кострома, Брянск, Красноярск, Норильск, Кемерово, Новокузнецк, Новосибирск, Омск, Барнаул, Иркутск, Братск, Бийск, Улан-Удэ, Томск, Абакан, Чита, Горно-Алтайск, Кызыл, Санкт-Петербург, СПб, Выборг, Вологда, Череповец, Мурманск, Сыктывкар, Ухта, Архангельск, Северодвинск, Великий Новгород, Петрозаводск, Гомель, Гродно, Витебск, Могилев, Брест, Минск, Алма-Ата, Астана, Ереван, Киев, Днепропетровск, Львов, Ташкент, Могилев, Псков, Калининград, Нарьян-Мар, Уфа, Стерлитамак, Самара, Тольятти, Сызрань, Нижний Новгород, Арзамас, Саратов, Энгельс, Пермь, Ижевск, Казань, Набережные Челны, Бугульма, Пенза, Оренбург, Орск, Чебоксары, Новочебоксарск, Ульяновск, Киров, Йошкар-Ола, Саранск, Екатеринбург, Верхняя Пышма, Серов, Челябинск, Магнитогорск, Снежинск, Тюмень, Курган, Нижневартовск, Сургут, Надым, Ростов-на-Дону, Волгодонск, Таганрог, Волгоград, Волжский, Краснодар, Армавир, Астрахань, Майкоп, Владивосток, Уссурийск, Хабаровск, Комсомольск-на-Амуре, Советская Гавань, Южно-Сахалинск, Благовещенск, Петропавловск-Камчатский, Мирный, Ставрополь, Минеральные Воды, Махачкала, Нальчик, Алушта, Армянск, Джанкой, Евпатория, Керчь, Севастополь, Симферополь, Судак, Крым, Феодосия, Ялта. Сайт отвечает на вопросы: Как отремонтировать, настроить, установить оборудование? Где скачать документацию (инструкцию, мануал)? Где посмотреть партномер? Где купить запчасти (запасные части, зип), комплектующие, аксессуары и термоэтикетка, чековая лента для весов, термопринтеров штрих-кода, чековых принтеров? Обслуживание весов, кассовых аппаратов, термопринтеров, терминалов сбора данных, сканеров штрих-кода: каким образом возможно своими силами? Вас интересует наличие, цена, купить запчасти за наличный и безналичный расчет? — сделайте запрос нашим менеджерам. Официальный сайт компании Zipstore.ru.
 Когда в какой-нибудь литературе мы встречаем незнакомое слово или понятие, мы хотим скорее узнать его определение. Зная точное определение можно дальше проследить сферу использования и методы применения главного действующего лица того или иного понятия. Сегодня мы ближе познакомимся с таким понятием как шим — контроллер.
Когда в какой-нибудь литературе мы встречаем незнакомое слово или понятие, мы хотим скорее узнать его определение. Зная точное определение можно дальше проследить сферу использования и методы применения главного действующего лица того или иного понятия. Сегодня мы ближе познакомимся с таким понятием как шим — контроллер.Понятие шима
Прежде чем дать определение упомянутому словосочетанию, следует узнать или кому-то просто напомнить себе принцип нагревания силовых компонентов радиосхемы. Их сущность заключается в действии нескольких переключательных режимах. Все электросиловые компоненты в подобных радиосхемах всегда пребывают в двух состояниях. Первое — это открытое, а второе раскрытое. В чём разница между этими двумя состояниями? В первом случае компонент обладает нулевым током. Во втором же у компонента нулевое значение напряжения. Конечным результатом взаимодействия электросиловых компонентов с необходимой напряжённостью можно считать получения сигнала той формы, которая нужна согласно установленным правилам.
Шимом же называют специальный модулятор, предназначенный для контролирования времени открытия силового ключа. Время для открытия ключа устанавливается с учётом получаемого напряжения. Получить идеальный вариант сигнала возможно лишь в том случае, если перед преобразованием сигнал без затруднений прошёл все необходимые этапы. Какие это этапы из чего состоит формирование такого сигнала.
Особенности шим — контроллера
![]() Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
- Вывод питания. Несёт большую ответственность за электрическое питание всех существующих схем. Нередко вывод питания путают с выводом контроля питания. Важно знать, что несмотря на похожие слова в названии, эти два понятия имеют совершенно разную характеристику. Это ещё раз наглядно докажет знакомство с выводом контроля питания.
- Вывод контроля питания. Эта составляющая часть микросхемы следит за состоянием показателей напряжения прямо на выводе микросхемы. Главная задача вывода контроля питания — это не допустить превышение расчётной отметки. Существует одна серьёзная опасность, а именно
- общий выход. Третий главный элемент схемы имеет форму ножки. Эта ножка, в свою очередь, подключена к общему проводу схемы, которые отвечает за питания всей системы.
Все три составляющих очень важны. Если хотя бы один из элементов по какой-то причине выходит из строя, работа всей микросхемы заметно ухудшается или совершенно прекращается.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие. Вот их некоторые особенности:
 Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять. Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение. Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять. Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение. Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
 Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
- Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Схема работы импульсного блока питания
Это устройство появилось на свет всего лишь несколько десятилетий назад. Однако уже успело стать популярным и востребованным. Импульсный блок питания состоит из следующих деталей:
- Фильтрующего конденсата.
- Ключевого силового транзистора.
- Сетевого выпрямителя, состоящего из нескольких элементов.
- Выпрямительных диодов выходной системы.
- Силовой дроссели. Дроссель помогает корректировать возникающее напряжение.
- Импульсивного источника питания. Именно отсюда напряжение преобразовывается в силовую цепь.
- Цепей управления выходного напряжения.
- Накопительной фильтрующей ёмкости;
- Оптопара;
- Задающего генератора.
- схемы обратной связи.
Зная состав импульсного блока, следует ознакомиться с принципом его работы.
Принцип работы импульсного блока
![]() Принцип работы импульсного блока заключается в выдаче стабилизированного питающего напряжения на основе принципа взаимодействия элементов инертной системы. Вот поэтапные шаги, наглядно демонстрирующие всю суть деятельности такого блока питания:
Принцип работы импульсного блока заключается в выдаче стабилизированного питающего напряжения на основе принципа взаимодействия элементов инертной системы. Вот поэтапные шаги, наглядно демонстрирующие всю суть деятельности такого блока питания:
- Передача сетевого напряжения на выпрямитель (осуществляется при помощи специальных проводов).
- С помощью фильтра выпрямителя происходит сглаживание напряжения. В этом процессе принимают участие и конденсаторы.
- с помощь диодного входного моста выпрямляются синусоиды. Далее при участии транзисторной системы проходящие синусоиды должны преобразоваться в высокочастотные импульсы. Зачастую импульсы имеют прямоугольную форму.
Но возникает вопрос, какую роль в импульсном блоке играют шим — контролёры. Мы постараемся дать ответ на него в следующем подзаголовке.
Роль шима — контроллера в работе импульсного блока
 Шим — контроллеры играют важную роль в импульсном блоке. Он отвечает за процессы, связанные с широтно — импульсной модуляцией. Шим — контролёр способствует выработке импульсов, у которых одинаковая частота, но в то же время разная длительность включения. Все подаваемые импульсы соответствуют определённой логической единице. У импульсов одинаковая не только частота, но и одинаковая величина амплитуды. Продолжительность функционирования логической единицы может меняться в процессе её работы. Такие перемены помогают наилучшим образом управлять работой электронной системы.
Шим — контроллеры играют важную роль в импульсном блоке. Он отвечает за процессы, связанные с широтно — импульсной модуляцией. Шим — контролёр способствует выработке импульсов, у которых одинаковая частота, но в то же время разная длительность включения. Все подаваемые импульсы соответствуют определённой логической единице. У импульсов одинаковая не только частота, но и одинаковая величина амплитуды. Продолжительность функционирования логической единицы может меняться в процессе её работы. Такие перемены помогают наилучшим образом управлять работой электронной системы.
Таким образом, шим — контролёр — одна из важных цепочек, участвующих в работе импульсного блока. В некоторых видах помимо шим — контролёра благополучное функционирование блока питания обеспечивает импульсный трансформатор и специальный каскад силовых ключей.
А в каких сферах используются импульсные блоки питания? В первую очередь, в электронике. Об этом речь пойдёт далее.
Особенности работы микросхемы или как может работать ноутбук
Компьютерный блок питания и роль шим — контролёра в нём Все современные компьютеры, в том числе и ноутбуки, оснащены импульсными блоками питания. Установленные в ноутбуке или в обычном компьютере блоки содержат индивидуальную микросхему шим — контролёра. Стандартной микросхемой считают микросхему TL494CN.
Прежде всего стоит сказать о главной задаче микросхемы TL494CN. Итак, главной задачей схемы является широтно — импульсная модуляция. Другими словами микросхема вырабатывает импульсы напряжения. Одни импульсы регулируемы, другие нет. В микросхеме предусмотренно примерно 6 способов выводов сигналов. Упомянем некоторые интересные подробности каждого вывода микросхемы ноутбука.
![]() Первый вывод. Считается положительным входом усилителя сигнала ошибки. Уровень напряжения на первом выводе оказывает значительное влияние на функционирование последующих выводов. При низком напряжении при втором выводе у выхода усилителя ошибки будут низкие показатели. И напротив, при повышенном напряжении показатели усилителя ошибки повысятся.
Первый вывод. Считается положительным входом усилителя сигнала ошибки. Уровень напряжения на первом выводе оказывает значительное влияние на функционирование последующих выводов. При низком напряжении при втором выводе у выхода усилителя ошибки будут низкие показатели. И напротив, при повышенном напряжении показатели усилителя ошибки повысятся.
Второй вывод. Второй же вывод является напротив отрицательным выходом для усилителя. Здесь показатели напряжения немного по-иному оказывают своё влияние на усилитель. Так, при высоком напряжении (выше чем на первом выводе) у выхода усилителя низкие показатели. В случае низкого напряжения усилитель обладает высокими данными.
Третий вывод. Служит неким контактным звеном. Перемены в уровне напряжения зависят от двух диодов, которыми наделен внутренний усилитель. Во время изменения уровня сигнала хотя бы на одном диоде меняется уровень напряжения всего усилителя. В некоторых случаях третий вывод обеспечивает скорость изменения ширины импульсов.
Четвёртый вывод. Способен управлять диапазон скважности всех выходных импульсов. Уровень поступаемого напряжения в четвёртом выводе влияет на ширину импульсов в микросхеме шим — контролёра.
Пятый вывод. Перед пятым выводом стоит немного другая задача. Он присоединяет врямязадующий конденсатор к заданной микросхеме. Ёмкость присоединённого конденсата оказывает значительное влияние на частоту выходных импульсов шим — контролёра.
Шестой вывод. Служит для подключения времязадающего регистра, который также влияет на частоту.
Все эти шесть выводов способствуют выполнению главной задачи, которая поставлена перед микросхемой шим — контролёра — выход импульсов с широкой модуляцией. А это действие, в свою очередь, влияет на работу импульсного блока, а значит и на работу ноутбука.
Если шим — контролёр выходит из строя
Временами шим — контролёры их схемы и источник питания (в том числе и встроенные в ноутбук) могут ломаться и выходить из строя. В таких случаях понадобится выявить неисправности (в одних случаях проверять необходимо источник питания, в других проверять стоит саму схему). Для этой цели были разработаны мультиметры. Мультиметры тщательно исследуют работоспособность шим — контролёров и при необходимости помогают устранить неисправности. Самыми распространёнными причинами, почему следует проверять эти устройства, считают нестабильную работу платы и изменения показателей напряжения. Если их устранить, техника будет работать.
Tl494cn как проверить мультиметром
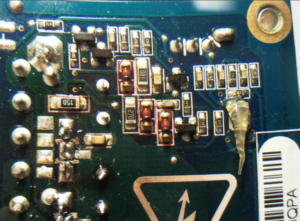
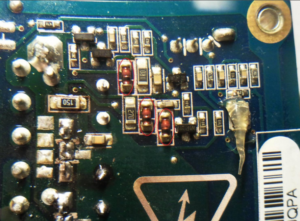
Широтно–импульсные преобразователи являются конструктивной частью импульсных блоков питания электронных устройств. Разберем, как проверить ШИМ контроллер с применением мультиметра, на примере материнской платы компьютера.

Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован тестер радиодеталей. Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.

Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
 произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;
произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;- не выпаивая транзисторы, замерить и сравнить сопротивление между затвором и истоком в каждой из фаз преобразователя. Поврежденный участок определяется по более низкому значению сопротивления.
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату.
Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки. Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает.
Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Признаки неисправности, их устранение
Перейдем к рассмотрению конкретных признаков неисправностей ШИМ контроллера.
Остановка сразу после запуска
Импульсный модулятор запускается, но сразу останавливается. Возможные причины: разрыв цепи обратной связи; блок питания перегружен по току; неисправны фильтровые конденсаторы на выходе.
Поиск проблемы: осмотр платы, поиск видимых внешних повреждений; измерение мультиметром напряжения питания микросхемы, напряжения на ключах (на затворах и на выходе), на выходных емкостях. В режиме омметра мультиметром надо измерить нагрузку стабилизатора, сравнить с типовым значением для аналогичных схем.
Импульсный модулятор не стартует
Возможные причины: наличие запрещающего сигнала на соответствующем входе. Информацию следует искать в даташите соответствующей микросхемы. Неисправность может быть в цепи питания ШИМ контроллера, возможно внутренне повреждение в самой микросхеме.
Шаги по определению неисправности: наружный осмотр платы, визуальный поиск механических и электрических повреждений. Для проверки мультиметром делают замер напряжений на ножках микросхемы и проверку их соответствия с данными в даташит, в случае необходимости, надо заменить ШИМ контроллер.

Проблемы с напряжением
Выходное напряжение существенно отличается от номинальной величины. Это может происходить по следующим причинам: разрыв или изменение сопротивления в цепи обратной связи; неисправность внутри контроллера.
Поиск неисправности: визуальное обследование схемы; проверка уровней управляющих и выходных напряжений и сверка их значений с даташит. Если входные параметры в норме, а выход не соответствует номинальному значению – замена ШИМ контроллера.
Отключение блока питания защитой
При запуске широтно-импульсного модулятора, блок питания отключается защитой. При проверке ключевых транзисторов короткое замыкание не обнаруживается. Такие симптомы могут свидетельствовать о неисправности ШИМ контроллера или драйвера ключей.
В этом случае нужно произвести замер сопротивлений между затвором и истоком ключей в каждой фазе. Заниженное значение сопротивления может указывать на неисправность драйвера. При необходимости делается замена драйверов.
Источник: evosnab.ru
Ремонт блока питания для светодиодной ленты
Posted on 28.12.2015 // 0 Comments

Используя светодиодное освещение, многие радуются лишь до тех пор, пока оно исправно работает. Поломка блока питания светодиодной ленты может не только огорчить, но и ударить немного по карману. Сегодня мы рассмотрим ремонт блока питания для светодиодной ленты, типичные его неисправности и методики их устранения.
Ремонт блока питания для светодиодной ленты
Зачастую все дешевые китайские блоки питания для светодиодных лент выглядят примерно так. Стоит ли браться за ремонт такого блока? Стоит однозначно!

Как правило, если плата блока питания целая, и не превратилась в кусок обуглившегося радио-хлама, то ремонту такой блок подлежит.
Схема, блок питания для светодиодной ленты
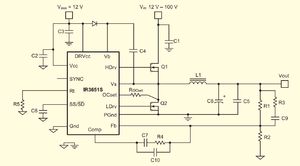
Схемы в таких блоках почти всегда одинаковые, для наглядности можно пользоваться схемой изображенной ниже. Типичная схема, которая используется в подобных блоках питания.

Основные неисправности в этих блоках питания:
- Микросхема ШИМ контроллер – TL494. Аналог: МВ3759, IR3M02, М1114ЕУ, KA7500 и т.д.
- Конденсаторы С22, С23 – высыхают, вздуваются и т.д.
- Ключевые транзисторы Т10, Т11.
- Сдвоенный диод D33 и конденсаторы С30-С33.
- Остальные элементы выходит из строя крайне редко, но тоже не стоит упускать их из вида.
Для начала вскрываем наш блок и осматриваем предохранитель. Если он целый, подаем питание и измеряем напряжение на конденсаторах С22, С23. Оно должно быть порядка 310 В. Если напряжение такое, значит сетевой фильтр и выпрямители исправны.
Следующим этапом станет проверка ШИМ. У нашего блока это микросхема КА7500.

– на 12 выводе должно быть около 12-30 В. Если нет, проверяем дежурку. Если есть – проверяем микросхему.

– на 14 выводе должно быть около +5 В.

Если нет, меняем микросхему. Если есть – проверяем микросхему осциллографом согласно схеме.

Как проверить TL494 без осциллографа?
Если нет осциллографа, рекомендуем взять заведомо рабочий блок питания, установить вместо микросхемы DIP панель, куда можно подключать проверяемые ШИМ контроллеры. Это единственный достоверный и вменяемый способ проверки TL494 без осциллографа.
Наша микросхема КА7500 после проверки, оказалась неисправной. Перед установкой нового ШИМ контроллера устанавливаем DIP панель.

На фото мы подготовили все для замены ШИМ.

Меняем ее на аналог TL494CN.

Следующим этапом станет небольшая модернизация блока. Если внимательно осмотреть сетевой фильтр есть место для установки варистора.

Устанавливаем варистор К275. Он будет защищать блок от скачков высокого напряжения. При коротком скачке – варистор поглощает энергию импульса, а при длительном – сопротивление варистора станет настолько малым, что сработает предохранитель и вся схема блока останется целой.

Блок перед финальным тестом.

После замены неисправных компонентов подключаем блок в сеть. Как видим блок прекрасно работает. Подстроечным резистором Р1 (возле зеленого светодиода) можно точно выставить выходное напряжение на блоке питание. Диапазон корректировки лежит в пределах от 11,65 В. до 13,25 В.

Как видим все работает исправно, ремонт блока питания для светодиодной ленты окончен. Учитывая, что в блоке отсутствует активная система охлаждения, рационально установить на крышку блока дополнительный кулер, закрытый сеткой в виде гриля.

Важно! При ремонте блока многие его компоненты находятся под опасным для жизни напряжением. Не стоит проводить манипуляции без достаточных знаний и навыков!
Источник: diodnik.com
Проверка 494 мультиметром и принцип ее работы для гуманитариев
Проверка 494 мультиметром и принцип ее работы для гуманитариев
Интро:
Данный сабж предназначен для тех, кому слова «операционный усилитель», «компаратор», «ШИМ» мало что говорят, а слова «отрицательный передний фронт импульса» — это что-то такое, что видно только людям с аквариумами вместо очков на сверхсекретном армейском или насовском приборе, но нужно/хочется проверить и/или отремонтировать/собрать/модернизировать БП. Все нижесказанное не претендует на истинность и суть лишь результат эмпирического опыта аффтара по изготовлению регулирумого БП с годным амперажем из компьютерного — старинного АТ блока.
Микруха представляет собой жучка на 16-ти ножках, в коих есть свои функции:
12-я нога: плюс питания (7-40) вольт
7-я нога: 0 или минус питания.
14-я нога — источник 5 вольт +-5% (на практике — +-10%). Используется в основном как опорное напряжение для сравнения с выходным, т.е. служит французкой палатой мер и весов — сферические 5 вольт в вакууме.
Дальше уже интересная функциональная часть:
5-я и 6-я нога — генератор частоты. Оттуда берется частота работы микрухи, и, соответственно, всего блока.
На 5-ю ногу вешается конденсатор (обычно керамика 103), на 6-ю — сопротивление (12-23 к). Они-то и задают частоту работы. Исходить нужно из того, что при 25 кОм — частота порядка 10 000 Хз, при 12 кОм — 50 тысяч Хз. Графики зависимости частоты от кондера и сопротивления в приложениях (приложу позжее).
Намерянная лично мной напруга на этих ногах: — 5-я — 1.5 — 2.05 вольта, 6-я — 2.5 — 4.05 вольта. Меряется мультиметром относительно массы (7-й ноги).
Вопщем, эта конструкция генерирует частоту, и эта частота подается внутри схемы через хитро закрученную конструкцию на пары ног 8 и 9 и 10 и 11. Тут следует упомянуть о 13-й ноге микрухи — когда она замкнута с 14-й — то пары 8 и 9 — 10 и 11 работают попеременно, когда 13-я на массе (?) — синхронно. На самом деле я не знаю, не проводил эхпериментов по этому поводу, но есть основания (анализ литературы) полагать, что это как-то так.
Работа этих пар ног заключается в том, что они, с нужной (ноги 5-6) частотой, «сливают ток», который берется из середины маленькой катушки (эхперты с раздутым ЧСВ заметят, что это не «катушка», а «трансформатор»), которая одной стороной выходит на низковольтную часть схемы БП, а второй — на высоковольтную. При этом обычно эти пары ног «сливают» не сами, а с помощью транзисторов 945, которые стоят между микрухой 494 и «катушкой».
Условный принцип работы на пальцах:
5-6 генерирует частоту — частота подается на 8-9 10-11, они «разрешают» току протекать по маленькому трансформатору, который, в свою очередь, разрешает току протекать по большому трансформатору, с которого, собственно, и берется напряжение на выходе БП. Обычно 9 и 11 лежат на земле, а 8 и 10 подключены к 945-м транзисторам. Вольтаж на 8 и 10 ололо 1,2-2,8 вольта (может другой, но вольтажа там минимум два в любом случае, об этом чуть ниже).
И все бы так прекрасно и спокойненько себе и работало, но хитрым инженерам нужно зарабатывать себе на хлеб с икоркой, поэтому они, мудрствуя лукаво, и придумали что-то по типу обратной связи — т.е. дополнительные уровни регулировки и усложнения всей этой конструкции .
Это пары ног 1-2 и 15-16, с каким-то хитрым названием типа «усилители ошибки» или еще как-то, только бы простой человек не разобрался в этом да не сделал все без инженеров-элекронщиков.
На самом деле все это работает просто — когда напряжение на одной ноге больше, чем на другой — частота с генератора (5-6 ноги) не подается на 8-9 10-11, они не сливают ток через катушку, катушка не управляет мощными транзисторами, те не позволяют току течь через большой трансформатор — БП не работает.
Эти пары ног, опосля «сравнения» напряжений, выходят на 3-ю ногу. При чем выходят хитро — только в случае получения в ОБОИХ сравнениях разрешения работать — результат будет в сторону работы микросхемы. В случае сравнения «в нашу пользу» — разрешения работы микросхемы (сливать ток из середины маленькой катушки, которая, в свою очередь, посредством силовых ключей — высоковольтных транзисторов. которая в чочорном чулане хранится в доме который построил Джек), на 3-й ноге будет небольшое (так нравится, как в литературе используется это выражение без указания цифр, ведь для какого-то работника АЭС и пару киловольт будет «небольшим» напряжением) — ололо +0,5 +0,05 вольта — напряжение. В случае «торможения» работы микрухи 15-16 парами — будет «-» вольт, в случае торможения 1-2 парами — +3,5 (от двух до пяти по-идее). В любом случае, отличное от «небольшого» (0,05 В) напряжения — свидетельствует о блокировании работы микросхемы, ибо внутри этой микрухи это напряжение 3-й ноги «сравнивается» с напряжением на 5-й (генераторе частоты), и должно быть меньше, чем на ней (на 5-й, как мы измерили и помним, ололо 1,6 вольта). Почему отрицательное напряжение на 3-й ноге уводит микруху в даун — может расскажут эхперты с осцилографами и ололометрами, я не пытался понять полностью, что в ней внутри творится. Наверное, «передний фронт импульса» становится неотрицательным, или еще какая-то сложное интересное и замечательное явление.
Теперь немного о 4-й ноге — генераторе «мертвой зоны», т.е. о длительности разрешения прохождения тока по маленькой катушке. Частота, генерируемая 5-6 ногами и идущая с 5-й ноги внутрь схемы, задает частоту разрешения протекания тока через маленькую катушку, однако в пределах одного такта этой частоты ток течет не все время, а лишь то, которое позволяет 4-я нога. Т.е., для примера, что бы не крутиться в наносекундах, допустим, что пятая нога дает частоту один раз в час, при этом напряжение этот час линейно нарастает — а через час резко пропадает. Как мы помним, 8-9 и 10-11 позволяют току проходить только если напряжение 5-й ноги больше, чем 3-й или 4-й, соответственно 8-9 и 10-11 не позволят току проходить, пока напряжение 5-й ноги не превысит напряжение 4-й, ибо, как мы помним, напряжение 5-й нарастает линейно, и, допустим, напряжение 4-й 1,5 вольта, за наш условный час напряжение 5-й нарастает до 1,5 вольта за сорок минут, и в этом часе 8-9 и/или 10-11 работают лишь те 20 минут, когда напряжение 5-й растет от 1,5 вольт до максимума, а когда первые сорок минут от нуля до 1,5 — 8-9 и/или 10-11 не пропускают ток.
Итак, проверка 494 манометром мультиметром:
1. Отключаем питание разряжаем кондеры.
2. Проверяем, что точно отключено 220.
3. Припаиваем к 12-й и ноге микры проводок, на него подаем плюс и на землю минус или 0 стабилизированного(?) напряжения ололо 12 вольт.
4. Меряем +5 на 14-й ноге.
5. Меряем напряжение на 5-й ноге (генераторе частоты). (Ололо 1,5-3,3 вольт).
6. Меряем 4-ю. Должно быть меньше 5-й. Если на четвертой больше — ищем причину, устраняем.
7. Меряем 3-ю. Должно быть меньше 5-й. Если больше — то вспоминаем, что она результирует то, что насравнивали 1-2 и 15-16 ноги.
8. Меряем 2-ю ногу. Меряем 1-ю. На второй должно быть больше на типовой схеме. Если не больше первой — то бида-бида, глядим откуда поступает напруга на первую, устраняем.
9. Проверяем 15-16 ногу. На 15-й должно быть больше на типовой схеме.
10. Начинаем играться:
10.1. Берем в одну руку пинцет, а в другую — положительный щуп -манометра- вольтметра. (Отрицательнй закрепляем на земле).
10.2. Тычем красненьким щупом в 3-ю ногу, запоминаем показания.
10.3. Не убирая щупа, пинцетом подаем напряжение с 14-й (палата мер и весов) на 1-ю (на второй должно быть меньше 5-ти вольт, т.е. делаем на первой ноге овервольтаж относительно второй). Напряжение на 3-й ноге должно измениться — подняться вольт до 3,5, что свидетельствует о том, что пары 8-9 и 10-11 перестали позволять току течь через маленькую катушку. Если не поднялось — подаем пинцетом 5 вольт на вторую (на первой должно быть меньше — делаем овервольтаж второй над первой). Если напряжение на 3-й не упало — ололо, идем ковырять 15-16 выводы, проделывать с ними те же манипуляции по подаче напряжения с 5-й лапы на 15-ю (в случае 16-й на земле). Нужно добиться этими манипуляциями, что бы напряжение на 3-й ноге было меньше напряжения на 5-й. В случае успешности данной деятельности идем дальше.
10.4. Ставим щуп на 11 или 8-ю ногу и глядим, что там происходит. При подаче напруги с 14-й на 1-ю и, соответственно, подскока напруги на 3-й — напряжение на 8 и 11-й должно вырасти где-то на 1 вольт — каналы -в астралы- закрываются.
Если все работает как написано — исследуем частоту. При сопротивлении, подключенному между землей и 6-й ногой порядка 30-50к и 103-м кондере на 5-й — частота уже слышима. Подлючаем динамик от наушников к 5-й ноге и слушаем частоту. Установив подстроечный резистор на 50к на 6-ю ногу можно слушать изменения частоты. Про динамик — теоретизирование, сам я частоту и ее изменения слушал «поющим» трансформатором, динамика не было под рукой, так что коли вы не услышите ничего в наушнике при пении в трансе — дайте знать — вычеркнем.
Таким образом без всех этих ваших осцилографов обычным мультиметром можно проверить работоспособность TL494. Эхперты, конечно же скажут, что нифига мы не проверим, ибо не увидим «отрицательной волны левого переднего фронта», но с инертностью мультиметра все изменения на рабочей частоте обретают усредненное значение, и по величине «усредненных» значений можно сделать много правильных выводов.
Дополню, может быть, после очередных эхпериментов.
Источник: rom.by
Tl494cn как проверить мультиметром
«Проверка микросхемы ШИМ TL494 и аналогичных (КА7500).
1. Включаем блок в сеть. На 12 ноге должно быть порядка 12-30V.
2. Если нет — проверяйте дежурку. Если есть — проверяем напряжение на 14 ноге — должно быть +5В (+-5%).
3. Если нет — меняем микросхему. Если есть — проверяем поведение 4 ноги при замыкании PS-ON на землю. До замыкания должно быть порядка 3. 5В, после — около 0.
4. Устанавливаем перемычку с 16 ноги (токовая защита) на землю (если не используется — уже сидит на земле). Таким образом временно отключаем защиту МС по току.
5. Замыкаем PS-ON на землю и наблюдаем импульсы на 8 и 11 ногах ШИМ и далее на базах ключевых транзисторов.
6. Если нет импульсов на 8 или 11 ногах или ШИМ греется – меняем микросхему. Желательно использовать микросхемы от известных производителей (Texas Instruments, Fairchild Semiconductor и т.д.).
7. Если картинка красивая – ШИМ и каскад раскачки можно считать живым.
8. Если нет импульсов на ключевых транзисторах — проверяем промежуточный каскад (раскачку) – обычно 2 штуки C945 с коллекторами на трансе раскачки, два 1N4148 и емкости 1. 10мкф на 50В, диоды в их обвязке, сами ключевые транзисторы, пайку ног силового трансформатора и разделительного конденсатора.»
Принесли БП, помогите разобраться раз и навсегда.
PS_ON 3,05В, +5V_SB 5,04В.
При замыкании PS_ON на землю вентилятор дергается и всё.
Следов перегрева, вспухших кондеров нет. Транзисторы раскачки, силовые и диоды целые. Кондер по питанию ШИМ заменил. Не помогает. Завтра остальные кондеры попробую заменить и остальные элементы проверю. Сейчас есть вопрос по ШИМ.
Проверяю ШИМ:
1. На 12 выводе 14,5В
2. На 14 выводе 4,96В
3. На 4 выводе 3,1В, при замыкании PS_ON напряжение на 4 выводе не меняется, хотя в методике с сайта указано, что должно уменьшится.
Вот здесь описан принцип работы ШИМ: http://bp.xsp.ru/tl494.php
Вот, что указанно про вывод 4:
«Архитектура микросхемы позволяет регулировать величину минимальной длительности «мертвой зоны» с помощью потенциала на выводе 4 микросхемы. Потенциал этот задается с помощью внешнего делителя, подключаемого к шине выходного напряжения внутреннего опорного источника микросхемы Uref.
В некоторых вариантах ИБП такой делитель отсутствует. Это означает, что после завершения процесса плавного пуска (см. ниже) потенциал на выводе 4 микросхемы становится равным 0. В этих случаях минимально возможная длительность «мертвой зоны» все же не станет равной 0, а будет определяться внутренним источником напряжения DA7 (0,1В), который подключен к неинвертирующему входу компаратора DA1 своим положительным полюсом, и к выводу 4 микросхемы — отрицательным. Таким образом, благодаря включению этого источника ширина выходного импульса компаратора DA1, а значит и ширина «мертвой зоны», ни при каких условиях не может стать равной 0, а значит «пробой по стойке» будет принципиально невозможен.
Другими словами, в архитектуру микросхемы заложено ограничение максимальной длительности ее выходного импульса (минимальной длительности «мертвой зоны»).
Если имеется делитель, подключенный к выводу 4 микросхемы, то после плавного пуска потенциал этого вывода не равен 0, поэтому ширина выходных импульсов компаратора DA1 определяется не только внутренним источником DA7, но и остаточным (после завершения процесса плавного запуска) потенциалом на выводе 4. Однако при этом, как было сказано выше, сужается динамический диапазон широтной регулировки ШИМ компаратора DA2.»
Т.е. пока ШИМ в дежурном режиме, на выводе 4 должно быть напряжение и оно у меня есть, а при запуске это напряжение должно уменьшиться либо до нуля, либо до значения определяемого делителем, но в любом случае должно уменьшиться.
Вопрос в следующем: напряжение на выводе 4 ШИМ у меня не уменьшает сама ШИМ (т.к. ШИМ не исправна) и поэтому блок не стартует, или ШИМ не стартует из-за неисправности в других цепях, и уже потому, что ШИМ не стартовала напряжение на выводе 4 ШИМ не изменяется? Другими словами в приведенном описании указанно: «после плавного пуска потенциал этого вывода» , а как узнать произошел ли этот плавный пуск и уже затем ШИМ уходит в защиту из-за неисправности каких то внешних цепей, или сама ШИМ не смогла запуститься, т.к. она неисправна?
Источник: www.monitorlab.ru
Проверка работоспособности шим-контроллера.
Проверка работоспособности
шим-контроллера.
Шим-контроллер считают «сердцем» источников питания, но предварительно нужно проверить и другие компоненты блока питания выполнив стандартную последовательность действий по ремонту блока питания (БП):
1) В выключенном состоянии источник внимательно осмотреть (особое внимание обратить на состояние всех электролитических конденсаторов — они не должны быть вздуты).
2) Проверить исправность предохранителя и элементов входного фильтра БП.
3) Прозвонить на короткое замыкание или обрыв диоды выпрямительного моста (эту операцию, как и многие другие, можно выполнить, не выпаивая диоды из платы). При этом в остальных случаях надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором (в подозрительных случаях, элемент схемы необходимо выпаивать и проверять отдельно).
4) Проверить исправность выходных цепей: электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов и диодных сборок.
5) Проверить силовые транзисторы высокочастотного преобразователя и транзисторов каскада управления. Обязательно проверить возвратные диоды, включенные параллельно электродам коллектор-эмиттер силовых транзисторов.
Эти действия, дают положительный результат в обнаружении только следствия неработоспособности всего блока, но причина неисправности в большинстве случаев находится гораздо глубже. Например, неисправность силовых транзисторов может быть следствием: неисправности цепей схемы защиты и контроля, нарушения цепи обратной связи, неисправности ШИМ-преобразователя, выхода из строя демпфирующих RC-цепочек или, межвитковый пробой в силовом трансформаторе. Поэтому, если удается найти неисправный элемент, то желательно пройти все этапы проверок, перечисленные выше (т. к. предохранитель сам по себе никогда не сгорает, а пробитый диод в выходном выпрямителе становится причиной «смерти» ещё и силовых транзисторов высокочастотного преобразователя).
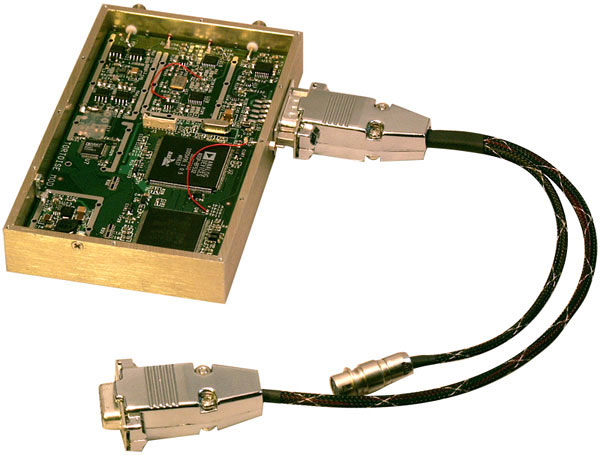
В качестве шим-контроллера («сердца» источников питания) долгое время использовали микросхему TL494, а затем и ее аналоги (MB3759, KA7500B … KA3511, SG6105 и др.). Проверку работоспособности такой микросхемы, например, TL494 (рис. 1) можно произвести, не включая блок питания. При этом микросхему необходимо запитать от внешнего источника напряжением +9В..+20В. Напряжение подается на вывод 12 относительно выв. 7 — желательно через маломощный выпрямительный диод. Все измерения тоже должны проводиться относительно выв. 7. При подаче питания на микросхему контролируем напряжение на выв. 5. Оно должно быть +5В (±5%) и быть стабильным при изменении напряжения питания на выв. 12 В пределах +9В..+20В. В противном случае не исправен внутренний стабилизатор напряжения микросхемы. Далее осциллографом смотрим напряжение на выв. 5. Оно должно быть пилообразной формы амплитудой 3,2 В (рис. 2). Если сигнал отсутствует или иной формы, то проверить целостность конденсатора и резистора, подключенных к выв. 5 и выв. 6, соответственно. В случае исправности этих элементов микросхему необходимо заменить. После этого проверяем наличие управляющих сигналов на выходе микросхемы (выв. 8 и выв. 11). Они должны соответствовать осциллограммам, приведенным на рис. 2. Отсутствие этих сигналов так же говорит о неисправности микросхемы. В случае успешного прохождения испытаний микросхема считается исправной.
Источник: al-tm.ru
Как проверить микросхему ШИМ-контроллера TL494(ka7500)
Вчера дошли руки до практического изучения этого, самого распространенного до недавнего времени, (на сегодняшний момент технологии пошли дальше) ШИМ-контроллера. У меня скопилось около 30 неисправных блоков. Не знаю, что первичнее, я их коллекционировал, чтобы научиться их ремонтировать, или я мечтал научиться их ремонтировать, для того и коллекционировал=))) Игрушечный осциллограф miniDSO DS203 я покупал(уже несколько лет назад), в первую очередь, с целью практического исследования импульсных источников. Тогда я с ним поиграл, и забросил идею ремонта блоков питания. У меня не хватило опыта и морального духу, чтобы разобраться в устройстве микросхемы.До сих пор мне удавалось отремонтировать только блоки с незначительными поломками.
Описаний работы микросхемы в интернете хоть отбавляй, я и раньше читал, например, эту статью, но ничего с ходу не понял.
Управляющая микросхема TL494
А тут мне попалось видео как парень запросто взял и отремонтировал блок.
Ссылка на тот момент, где он проверяет исправность микросхемы ШИМ.
Правильный ремонт блока питания ATX (by TheMovieAll)
Вобщем я опять достал один из неисправных блоков, и начал повторять за ним.
На AT блоке эксперимент удался сразу, при подаче питания с внешнего источника, микросхема запустилась, и я мог наблюдать «правильные» осциллограммы на 5-ой, 8-ой, и 11-ой ножках микросхемы. С ATX болком сразу не получилось.
Помучавшись немго, попытавшись запустить ШИМ в нескольких ATX блоках, я подумал, что не может быть, чтобы у всех был неисправен именно ШИМ. Значит я делаю что-то не так. Только тогда возникла мысль о PS-on сигнале. Замкнул его на землю, и заработало! Тут хочется добавить, замыкание резистора на 4-ой ножке, не универсальный метод, зависит от конкретного рисунка платы блока, часто DTC соединен с Vref так, что их не разъединить не разрезав дорожку. Парню TheMovieAll повезло, он замкнув резистор не посадил на землю Vref. Лучше этот резистор вообще не трогать. Более корректная методика — по инструкции с известного сайта ROM.by, пункт 3. Хотя я и читал ее несколько лет назад, обилие информации не позволило мне осмыслить и понять. Ну, видимо, некоторые вещи должны осмысливаться годами=)))
ROM.by: Азбука молодого ремонтника БП. Прочти, потом задавай вопрос.
Цитата:
«Проверка микросхемы ШИМ TL494 и аналогичных (КА7500).
Про остальные ШИМ будет написано дополнительно.
1. Включаем блок в сеть. На 12 ноге должно быть порядка 12-30V.
2. Если нет — проверяйте дежурку. Если есть — проверяем напряжение на 14 ноге — должно быть +5В (+-5%).
3. Если нет — меняем микросхему. Если есть — проверяем поведение 4 ноги при замыкании PS-ON на землю. До замыкания должно быть порядка 3…5В, после — около 0.
4. Устанавливаем перемычку с 16 ноги (токовая защита) на землю (если не используется — уже сидит на земле). Таким образом временно отключаем защиту МС по току.
5. Замыкаем PS-ON на землю и наблюдаем импульсы на 8 и 11 ногах ШИМ и далее на базах ключевых транзисторов.
6. Если нет импульсов на 8 или 11 ногах или ШИМ греется – меняем микросхему. Желательно использовать микросхемы от известных производителей (Texas Instruments, Fairchild Semiconductor и т.д.).
7. Если картинка красивая – ШИМ и каскад раскачки можно считать живым.
8. Если нет импульсов на ключевых транзисторах — проверяем промежуточный каскад (раскачку) – обычно 2 штуки C945 с коллекторами на трансе раскачки, два 1N4148 и емкости 1…10мкф на 50В, диоды в их обвязке, сами ключевые транзисторы, пайку ног силового трансформатора и разделительного конденсатора.»
Неотъемлемой частью каждого компьютера является блок питания (БП) . Он важен так же, как и остальные части компьютера. При этом покупка блока питания осуществляется достаточно редко, т. к. хороший БП может обеспечить питанием несколько поколений систем. Учитывая все это к приобретению блока питания необходимо отнестись очень серьезно, так как судьба компьютера в прямой зависимости от работы блока питания.
Основное назначение блока питания — формирование напряжения питания , которое необходимо для функционирования всех блоков ПК. Основные напряжения питания компонентов это:
Существуют также дополнительное напряжение:
Для осуществления гальванической развязки достаточно изготовить трансформатор с необходимыми обмотками. Но для питания компьютера нужна немалая мощность , особенно для современных ПК . Для питания компьютера пришлось бы изготовлять трансформатор, который имел бы не только большой размер, но и очень много весил. Однако с ростом частоты питающего тока трансформатора для создания того же магнитного потока необходимо меньше витков и меньше сечение магнитопровода. В блоках питания, построенных на основе преобразователя, частота питающего напряжения трансформатора в 1000 и более раз выше. Это позволяет создавать компактные и легкие блоки питания.
Простейший импульсный БП
Рассмотрим блок-схему простого импульсного блока питания , который лежит в основе всех импульсных блоков питания.
Блок схема импульсного блока питания .
Первый блок осуществляет преобразование переменного напряжения сети в постоянное . Такой преобразователь состоит из диодного моста, выпрямляющего переменное напряжение, и конденсатора, сглаживающего пульсации выпрямленного напряжения. В этом боке также находятся дополнительные элементы: фильтры сетевого напряжения от пульсаций генератора импульсов и термисторы для сглаживания скачка тока в момент включения. Однако эти элементы могут отсутствовать с целью экономии на себестоимости.
Следующий блок – генератор импульсов , который генерирует с определенной частотой импульсы, питающие первичную обмотку трансформатора. Частота генерирующих импульсов разных блоков питания различна и лежит в пределах 30 – 200 кГц. Трансформатор осуществляет главные функции блока питания: гальваническую развязку с сетью и понижение напряжения до необходимых значений.
Переменное напряжение, получаемое от трансформатора, следующий блок преобразует в постоянное напряжение. Блок состоит из диодов выпрямляющих напряжение и фильтра пульсаций. В этом блоке фильтр пульсаций намного сложнее, чем в первом блоке и состоит из группы конденсаторов и дросселя. С целью экономии производители могут устанавливать конденсаторы малой емкости, а также дроссели с малой индуктивностью.
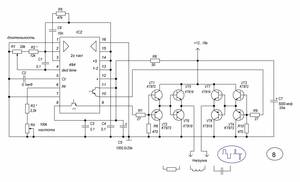
Первый импульсный блок питания представлял собой двухтактный или однотактный преобразователь . Двухтактный означает, что процесс генерации состоит из двух частей. В таком преобразователе по очереди открываются и закрываются два транзистора. Соответственно в однотактном преобразователе один транзистор открывается и закрывается. Схемы двухтактного и однотактного преобразователей представлены ниже.
.
Рассмотрим элементы схемы подробнее:
Х2 — разъем источник питания схемы.
Х1 — разъем с которого снимается выходное напряжение.
R1 — сопротивление, задающее начальное небольшое смещение на ключах. Оно необходимо для более стабильного запуска процесса колебаний в преобразователе.
R2 — сопротивление, которое ограничивает ток базы на транзисторах, это необходимо для защиты транзисторов от сгорания.
ТР1 — Трансформатор имеет три группы обмоток. Первая выходная обмотка формирует выходное напряжение. Вторая обмотка служит нагрузкой для транзисторов. Третья формирует управляющее напряжение для транзисторов.
В начальный момент включения первой схемы транзистор немного приоткрыт, т. к. к базе через резистор R1 приложено положительное напряжение. Через приоткрытый транзистор протекает ток, который также протекает и через II обмотку трансформатора. Ток, протекающий через обмотку, создает магнитное поле. Магнитное поле создает напряжение в остальных обмотках трансформатора. В следствии на обмотке III создается положительное напряжение, которое еще больше открывает транзистор. Процесс происходит до тех пор, пока транзистор не попадет в режим насыщения. Режим насыщения характеризуется тем, что при увеличении приложенного управляющего тока к транзистору выходной ток остается неизменным.
Так как напряжение в обмотках генерируется только в случае изменения магнитного поля, его роста или падения, то отсутствие роста тока на выходе транзистора, следовательно, приведет к исчезновению ЭДС в обмотках II и III. Пропадание напряжения в обмотке III приведет к уменьшению степени открытия транзистора. И выходной ток транзистора уменьшится, следовательно, и магнитное поле будет уменьшаться. Уменьшение магнитного поля приведет к созданию напряжения противоположной полярности. Отрицательное напряжение в обмотке III начнет еще больше закрывать транзистор. Процесс будет длиться до тех пор, пока магнитное поле полностью не исчезнет. Когда магнитное поле исчезнет, отрицательное напряжение в обмотке III тоже исчезнет. Процесс снова начнет повторяться.
Двухтактный преобразователь ра
Широтно–импульсные преобразователи являются конструктивной частью импульсных блоков питания электронных устройств. Разберем, как проверить ШИМ контроллер с применением мультиметра, на примере материнской платы компьютера.
Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован . Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.
Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату. Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки . Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает. Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Признаки неисправности, их устранение
Перейдем к рассмотрению конкретных признаков неисправностей ШИМ контроллера.
Остановка сразу после запуска
Импульсный модулятор запускается, но сразу останавливается. Возможные причины: разрыв цепи обратной связи; блок питания перегружен по току; неисправны фильтровые конденсаторы на выходе. Поиск проблемы: осмотр платы, поиск видимых внешних повреждений; измерение мультиметром напряжения питания микросхемы, напряжения на ключах (на затворах и на выходе), на выходных емкостях. В режиме омметра мультиметром надо измерить нагрузку стабилизатора, сравнить с типовым значением для аналогичных схем.
Импульсный модулятор не стартует
Возможные причины: наличие запрещающего сигнала на соответствующем входе. Информацию следует искать в даташите соответствующей микросхемы. Неисправность может быть в цепи питания ШИМ контроллера, возможно внутренне повреждение в самой микросхеме. Шаги по определению неисправности: наружный осмотр платы, визуальный поиск механических и электрических повреждений. Для проверки мультиметром делают замер напряжений на ножках микросхемы и проверку их соответствия с данными в даташит, в случае необходимости, надо заменить ШИМ контроллер.
Проблемы с напряжением
Выходное напряжение существенно отличается от номинальной величины. Это может происходить по следующим причинам: разрыв или изменение сопротивления в цепи обратной связи; неисправность внутри контроллера. Поиск неисправности: визуальное обследование схемы; проверка уровней управляющих и выходных напряжений и сверка их значений с даташит. Если входные параметры в норме, а выход не соответствует номинальному значению – замена ШИМ контроллера.
Отключение блока питания защитой
При запуске широтно-импульсного модулятора, блок питания отключается защитой. При проверке ключевых транзисторов короткое замыкание не обнаруживается. Такие симптомы могут свидетельствовать о неисправности ШИМ контроллера или драйвера ключей. В этом случае нужно произвести замер сопротивлений между затвором и истоком ключей в каждой фазе. Заниженное значение сопротивления может указывать на неисправность драйвера. При необходимости делается замена драйверов.
Для обычного человека, не вникающего в электронику, был незаметен переход всех питающих устройств с линейных на импульсные. Именно импульсные источники (ИИП) питания устанавливаются во всей современной аппаратуре. Основная причина перехода на такой тип преобразователей напряжения — это уменьшение габаритов. Так как всё время, с начала появления и изобретения, электронные приборы требуют постоянного уменьшения их размеров. На рисунке изображен для сравнения габариты обычного и импульсного источника постоянного тока. Не вооруженным глазом видны различия в размерах.
Принцип действия ИИП и его устройство
 Импульсный источник питания — это устройство, которое работает по принципу инвертора, то есть сначала преобразует переменное напряжение в постоянное, а потом снова из постоянного делает переменное нужной частоты. В конечном итоге последний каскад преобразователя всё равно основан на выпрямлении напряжения, так как большинство приборов всё же работают на пониженном постоянном напряжении. Суть уменьшения габаритов этих питающих и преобразующих устройств построена на работе трансформатора. Дело в том, что трансформатор не может работать с постоянным напряжением. Просто-напросто на выходе вторичной обмотки при подаче на первичную постоянного тока не будет индуктироваться ЭДС (электродвижущая сила). Для того чтобы на вторичной обмотке появилось напряжения оно должно меняться по направлению или же по величине. Переменное напряжение обладает этим свойством, ток в нём меняет своё направление и величину с частотой 50 Гц. Однако, чтобы уменьшить габариты самого блока питания и соответственно трансформатора, являющегося основой гальванической развязки, нужно увеличить частоту входного напряжения.
Импульсный источник питания — это устройство, которое работает по принципу инвертора, то есть сначала преобразует переменное напряжение в постоянное, а потом снова из постоянного делает переменное нужной частоты. В конечном итоге последний каскад преобразователя всё равно основан на выпрямлении напряжения, так как большинство приборов всё же работают на пониженном постоянном напряжении. Суть уменьшения габаритов этих питающих и преобразующих устройств построена на работе трансформатора. Дело в том, что трансформатор не может работать с постоянным напряжением. Просто-напросто на выходе вторичной обмотки при подаче на первичную постоянного тока не будет индуктироваться ЭДС (электродвижущая сила). Для того чтобы на вторичной обмотке появилось напряжения оно должно меняться по направлению или же по величине. Переменное напряжение обладает этим свойством, ток в нём меняет своё направление и величину с частотой 50 Гц. Однако, чтобы уменьшить габариты самого блока питания и соответственно трансформатора, являющегося основой гальванической развязки, нужно увеличить частоту входного напряжения.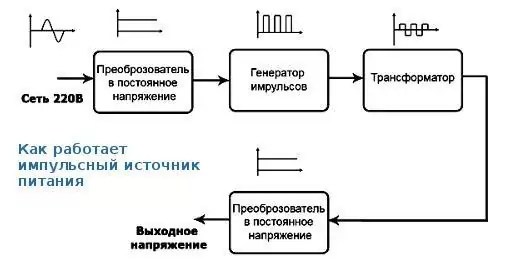
При этом импульсные трансформаторы, в отличие от обычных линейных, имеют ферритовый сердечник магнитопровода, а не стальной из пластин. И также современные блоки питания работающие по этому принципу состоят из:
- выпрямителя сетевого напряжения;
- генератора импульсов, работающего на основе ШИМ (широтно-импульсная модуляция) или же триггера Шмитта;
- преобразователя постоянного стабилизированного напряжения.
После выпрямителя сетевого напряжения генератор импульсов с помощью ШИМ генерирует его в переменное с частотой около 20–80 кГц. Именно это повышение с 50 Гц до десятков кГц и позволяет значительно уменьшить, и габариты, и массу источника питания. Верхний диапазон мог быть и больше, однако, тогда устройство будет создавать высокочастотные помехи, которые будет влиять на работу радиочастотной аппаратуры. При выборе ШИМ стабилизации обязательно нужно учитывать также и высшие гармоники токов.
Даже при работе на таких частотах эти импульсные устройства вырабатывают высокочастотные помехи. А чем больше их в одном помещении или в одном закрытом помещении тем больше их в радиочастотах. Для поглощения этих негативных влияний и помех устанавливаются специальные помехоподавляющие фильтры на входе устройства и на его выходе.
Это наглядный пример современного импульсного блока питания применяемого в персональных компьютерах.
A — входной выпрямитель. Могут применяться полумостовые и мостовые схемы. Ниже расположен входной фильтр, имеющий индуктивность;
B — входные с довольно большой емкостью сглаживающие конденсаторы. Правее установлен радиатор высоковольтных транзисторов;
C — импульсный трансформатор. Правее смонтирован радиатор низковольтных диодов;
D — катушка выходного фильтра, то есть дроссель групповой стабилизации;
E — конденсаторы выходного фильтра.
Катушка и большой жёлтый конденсатор, находящиеся ниже E, являются компонентами дополнительного входного фильтра, установленного непосредственно на разъёме питания, и не являющегося фрагментом основной печатной платы.
Если схему радиолюбитель изобретает сам то он обязательно заглядывает в справочник по радиодеталям. Именно справочник является основным источником информации в данном случае.
Обратноходовой импульсный источник питания
Это одна из разновидностей импульсных источников питания, имеющих гальваническую развязку как первичных, так и вторичных цепей. Сразу был изобретён именно этот в
В этом руководстве мы узнаем, как создать ШИМ-регулятор скорости двигателя постоянного тока с использованием таймера 555 IC. Мы подробно рассмотрим, как работает схема генератора ШИМ с таймером 555, как ее использовать для управления скоростью двигателя постоянного тока и как изготовить для нее специальную плату.
Обзор
Мы можем контролировать скорость двигателя постоянного тока, контролируя входное напряжение двигателя. Для этой цели мы можем использовать ШИМ или широтно-импульсную модуляцию.

ШИМ — это метод, с помощью которого мы можем генерировать переменное напряжение путем включения и выключения питания, которое поступает на электронное устройство с высокой скоростью. Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал включен, и количества времени, в течение которого сигнал выключается в течение одного периода времени.

Таймер 555 способен генерировать ШИМ-сигнал при установке в нестабильном режиме. Если вы не знакомы с таймером 555, вы можете проверить мой предыдущий учебник, в котором я подробно объяснил, что внутри и как работает 555 таймер IC.
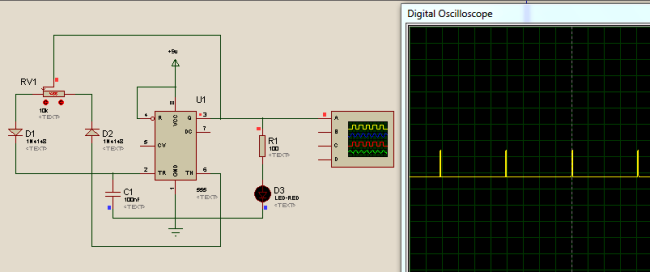
Вот базовая схема таймера 555, работающего в нестабильном режиме, и мы можем заметить, что выходной сигнал ВЫСОКИЙ, когда конденсатор С1 заряжается через резисторы R1 и R2.

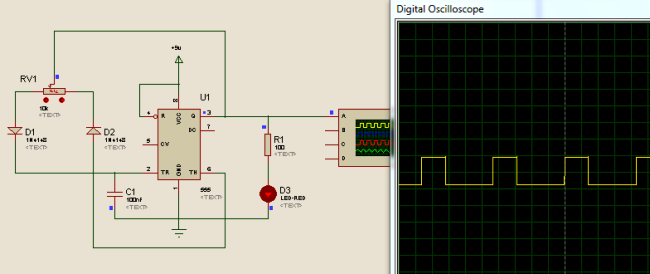
С другой стороны, выходной сигнал микросхемы НИЗКИЙ, когда конденсатор С1 разряжается, но только через резистор R2. Таким образом, мы можем заметить, что если мы изменим значения любого из этих трех компонентов, мы получим разные времена включения и выключения, или другой рабочий цикл прямоугольного выходного сигнала.Простой и быстрый способ сделать это — заменить резистор R2 потенциометром и дополнительно добавить в схему два диода.

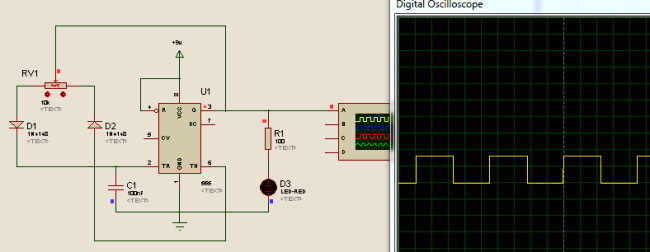
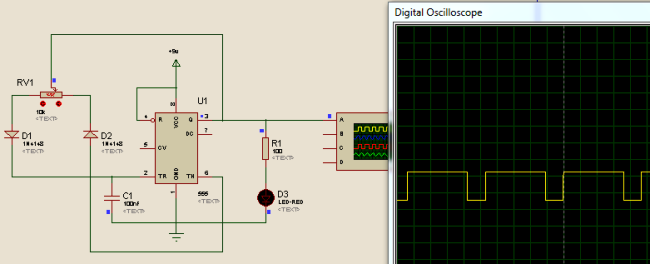
В этой конфигурации время включения будет зависеть от резистора R1, левой стороны потенциометра и конденсатора C1, а время выключения будет зависеть от конденсатора C1 и правой стороны потенциометра. Также можно заметить, что в этой конфигурации период одного цикла, то есть частоты, всегда будет одинаковым, потому что полное сопротивление при зарядке и разрядке будет оставаться одинаковым.

Обычно сопротивление R1 намного меньше, чем сопротивление потенциометра, например, 1 кОм по сравнению с 100 кОм потенциометра. Таким образом, мы имеем 99% контроль над сопротивлением зарядки и разрядки в цепи. Управляющий вывод таймера 555 не используется, но он подключен к конденсатору 100 нФ, чтобы исключить любые внешние помехи от этой клеммы. Сброс, вывод 4, активен на низком уровне, поэтому он подключен к VCC, чтобы предотвратить любой нежелательный сброс выхода.
Выход таймера 555 может понижать или подавать ток 200 мА на нагрузку. Так что, если двигатель, которым мы хотим управлять, превышает этот рейтинг, нам нужно использовать транзистор или полевой МОП-транзистор для управления двигателем. В этом примере я использовал (TIP122) транзистор Дарлингтона, который может выдерживать ток до 5А.

Выход IC должен быть подключен к базе транзистора через резистор, и в моем случае я использовал резистор 1 кОм. Для предотвращения скачков напряжения, создаваемых двигателем, нам необходимо использовать обратный диод, который подключен параллельно с двигателем.
Теперь мы можем перейти к разработке печатной платы для этой схемы. Для этой цели я буду использовать бесплатное онлайн-программное обеспечение EasyEDA. Здесь мы можем начать с поиска и размещения компонентов на пустом холсте. Библиотека содержит сотни тысяч компонентов, поэтому у меня не было проблем с поиском всех необходимых компонентов для этой схемы ШИМ-контроллера скорости двигателя постоянного тока.

После вставки компонентов нам нужно создать схему платы и начать расстановку компонентов.Два конденсатора должны быть расположены как можно ближе к таймеру 555, в то время как другие компоненты могут быть размещены, где мы хотим, но все же в логическом расположении в соответствии с принципиальной схемой.

Используя инструмент отслеживания, нам нужно соединить все компоненты. Инструмент отслеживания довольно интуитивен и с ним легко работать. Мы можем использовать как верхний, так и нижний слой, чтобы избежать пересечений и сделать дорожки короче.
![]()
Пэды компонентов, которые необходимо подключить к заземлению, устанавливаются на «Земля» на вкладке «Свойства пэда», где нам нужно ввести GND в метку «Net» при выборе пэда.
Мы можем использовать слой Silk для добавления текста на доску. Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа моего сайта для печати на доске. В конце, используя инструмент «Площадь меди», нам нужно создать площадь поверхности платы.

Вы можете найти файлы проекта EasyEDA этого проекта здесь.
Как только мы закончили с дизайном, нам просто нужно нажать кнопку «Вывод Gerber», сохранить проект, и мы сможем загрузить файлы Gerber, которые используются для изготовления печатной платы.Мы можем заказать печатную плату у JLCPCB, которая является службой изготовления печатных плат EasyEDA, а также они являются спонсорами этого видео.

Здесь мы можем просто перетащить загруженный zip-файл файлов gerber. После загрузки мы можем еще раз просмотреть PCB в программе просмотра Gerber. Если все в порядке, мы можем выбрать до 10 печатных плат и получить их всего за 2 доллара.

Тем не менее, через неделю появились печатные платы, и я должен признать, что довольно приятно изготавливать ваши собственные печатные платы.Качество печатных плат отличное, все точно так же, как и в дизайне.

Хорошо, теперь мы можем перейти к вставке компонентов на печатную плату.
Компоненты, необходимые для этого примера, можно получить по ссылкам ниже:
Раскрытие информации: это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Сначала я вставил компоненты меньшего размера, резисторы, диоды и конденсаторы.

Я согнул их провода с другой стороны, чтобы они оставались на месте, когда я переворачиваю плату для пайки.Что касается более крупных компонентов, я использовал клейкую ленту, чтобы удерживать их на месте при переворачивании платы.
Вот последний вид платы, и теперь осталось подключить двигатель постоянного тока и подходящий для него источник питания.

Я использовал 12В постоянного тока с высоким крутящим моментом, который я приводил в действие, используя 3,7В литий-ионные аккумуляторы, соединенные последовательно, которые дают около 12В. Теперь, используя потенциометр, мы можем контролировать скорость двигателя постоянного тока или сигнал ШИМ, генерируемый 555 таймером IC.

Я надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже.
 .
.В этом руководстве мы узнаем, как работают серводвигатели и как управлять сервоприводами с помощью Arduino и драйвера ШИМ PCA9685. Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Обзор
Существует много типов серводвигателей, и их главной особенностью является возможность точно контролировать положение своего вала. Серводвигатель — это система с обратной связью, которая использует обратную связь по положению для контроля своего движения и конечного положения.

В серводвигателях промышленного типа датчик обратной связи по положению обычно представляет собой высокоточный энкодер, в то время как в меньших RC или хобби-сервоприводах датчик положения обычно представляет собой простой потенциометр. Фактическая позиция, захваченная этими устройствами, возвращается в детектор ошибок, где она сравнивается с целевой позицией. Затем в соответствии с ошибкой контроллер корректирует фактическое положение двигателя в соответствии с заданным положением.

В этом уроке мы подробно рассмотрим серводвигатели для хобби.Мы объясним, как работают эти сервоприводы и как управлять ими с помощью Arduino.

Сервоприводы Hobby — это небольшие по размеру приводы, используемые для управления игрушечными автомобилями, лодками, самолетами и т. Д. Они также используются студентами-инженерами для создания прототипов в робототехнике, создания роботов-манипуляторов, биологически вдохновленных роботов, роботов-гуманоидов и так далее.

Принцип работы RC / Hobby Servo
Внутри сервопривода Hobby есть четыре основных компонента: двигатель постоянного тока, коробка передач, потенциометр и цепь управления.Двигатель постоянного тока имеет высокую скорость и низкий крутящий момент, но коробка передач снижает скорость примерно до 60 об / мин и в то же время увеличивает крутящий момент.

Потенциометр прикреплен к конечной передаче или выходному валу, так что при вращении двигателя потенциометр также вращается, создавая таким образом напряжение, которое связано с абсолютным углом выходного вала. В цепи управления это напряжение потенциометра сравнивается с напряжением, поступающим из сигнальной линии. При необходимости контроллер активирует встроенный H-мост, который позволяет двигателю вращаться в любом направлении, пока два сигнала не достигнут нулевой разницы.
Сервомотор управляется посылкой серии импульсов через сигнальную линию. Частота управляющего сигнала должна составлять 50 Гц, или импульс должен появляться каждые
.ШИМ-модуляция (широтно-импульсная модуляция) является важной характеристикой каждого современного микроконтроллера из-за его потребности в управлении многими устройствами практически во всех областях электроники. ШИМ широко используется для управления двигателем, управления освещением и т. Д. Иногда мы не используем микроконтроллер в наших приложениях, и если нам нужно для генерации ШИМ без микроконтроллера , тогда мы предпочитаем некоторые универсальные ИС, такие как операционные усилители, таймеры, генераторы импульсов и т. Д.Здесь мы используем микросхему таймера 555 для генерации ШИМ. 555 Таймер ИС — это очень полезная и универсальная ИС, которая может использоваться во многих приложениях.
Необходимые компоненты:
- 555 таймер IC -1
- 10K горшок -1
- резистор 100 Ом -1
- 0,1 мкФ конденсатор -1
- 1к резистор -1 (опционально)
- Хлебная доска -1
- Батарея 9 В -1
- LED -1 Мультиметр
- или CRO -1
- Перемычка —
- Разъем батареи -1
Что такое сигнал ШИМ?
Pulse Width Modulation (PWM) — это цифровой сигнал, который чаще всего используется в схемах управления.Этот сигнал установлен на высокий уровень (5 В) и низкий уровень (0 В) в заранее установленное время и скорость. Время, в течение которого сигнал остается высоким, называется «временем включения», а время, в течение которого сигнал остается низким, называется «временем выключения». Существует два важных параметра для ШИМ, которые обсуждаются ниже:
Рабочий цикл ШИМ:
Процент времени, в течение которого сигнал ШИМ остается ВЫСОКИМ (по времени), называется рабочим циклом. Если сигнал всегда включен, он находится в рабочем цикле 100%, а если он всегда выключен, это рабочий цикл 0%.
Рабочий цикл = Время включения / (Время включения + Время выключения)
Частота ШИМ:
Частота сигнала ШИМ определяет, как быстро ШИМ завершает один период. Один период — полное включение и выключение сигнала ШИМ, как показано на рисунке выше. В нашем уроке мы установим частоту 5 кГц.
Мы можем заметить, что светодиод гаснет на полсекунды, а светодиод горит на полсекунды.Но если частота включения и выключения увеличилась с «1 в секунду» до «50 в секунду». Человеческий глаз не может уловить эту частоту. Для нормального глаза светодиод будет виден как светящийся с половиной яркости. Таким образом, при дальнейшем уменьшении времени включения светодиод выглядит намного светлее.
Мы ранее использовали ШИМ во многих наших проектах, проверьте их ниже:
Принципиальная схема и объяснение генератора ШИМ-таймера 555:
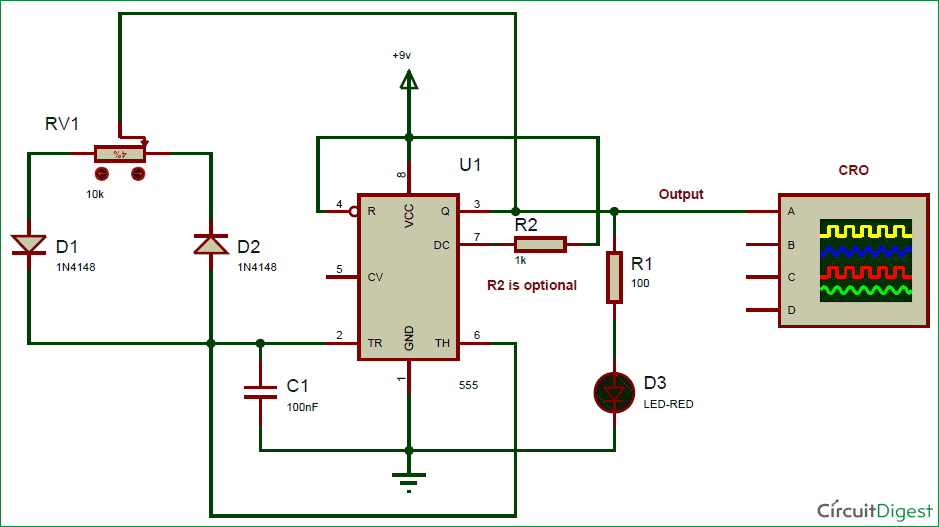
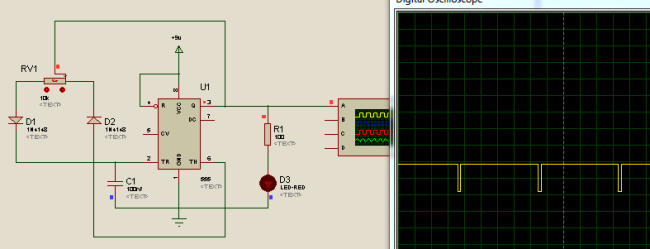
В этой схеме генератора ШИМ, , как мы упоминали выше, мы использовали 555 таймер IC для генерации сигнала ШИМ .Здесь мы контролировали выходную частоту сигнала ШИМ, выбрав резистор RV1 и конденсатор C1. Мы использовали переменный резистор вместо фиксированного резистора для изменения коэффициента заполнения выходного сигнала. Зарядка конденсатора через диод D1 и разрядка через диод D2 генерирует сигнал ШИМ на выходном выводе таймера 555.
Ниже приведена формула для получения частоты сигнала ШИМ:
F = 0,693 * RV1 * C1
Вся работа и демонстрация генерации ШИМ приведены в конце в Видео , где вы можете найти эффект ШИМ на светодиоде и проверить его на мультиметре.
Имитация генерации ШИМ с использованием таймера 555 IC:
Ниже приведены некоторые снимки:
с использованием Arduino Uno
Здесь мы собираемся связать двигатель постоянного тока с Arduino UNO , и его скорость регулируется. Это делается ШИМ (широтно-импульсная модуляция). Эта функция включена в UNO для получения переменного напряжения по постоянному напряжению. Метод ШИМ объясняется здесь; рассмотрим простую схему, как показано на рисунке.
Если кнопка нажата, если цифра, тогда двигатель начнет вращаться, и он будет двигаться, пока кнопка не будет нажата.Это нажатие является непрерывным и представлено в первой волне фигуры. Если, для случая, рассматриваемая кнопка нажата в течение 8 мс и открыта в течение 2 мс в течение цикла 10 мс, в этом случае двигатель не будет испытывать полное напряжение батареи 9 В, так как кнопка нажата только в течение 8 мс, поэтому напряжение RMS на двигатель будет около 7В. Из-за этого уменьшенного среднеквадратичного напряжения двигатель будет вращаться, но с пониженной скоростью. Теперь среднее время включения за период 10 мс = время включения / (время включения + время выключения), это называется рабочим циклом и составляет 80% (8 / (8 + 2)).
Во втором и третьем случаях кнопка нажимается еще меньше, чем в первом случае. Из-за этого среднеквадратичное напряжение на клеммах двигателя еще больше уменьшается. Из-за этого пониженного напряжения скорость двигателя еще больше уменьшается. Это снижение скорости при продолжительности рабочего цикла должно происходить до момента, когда напряжение на клеммах двигателя будет недостаточным для вращения двигателя.
Таким образом, мы можем сделать вывод, что ШИМ можно использовать для изменения скорости двигателя.
Прежде чем идти дальше, нам нужно обсудить H-МОСТ. Теперь эта схема имеет в основном две функции: первая для привода двигателя постоянного тока от сигналов управления малой мощности, а другая для изменения направления вращения двигателя постоянного тока.
Рисунок 1
Рисунок 2
Все мы знаем, что для двигателя постоянного тока, чтобы изменить направление вращения, нам нужно изменить полярность напряжения питания двигателя.Поэтому для изменения полярности мы используем H-мост. Теперь на рисунке 1 у нас есть четверные переключатели. Как показано на рисунке 2, для вращения двигателя А1 и А2 закрыты. Из-за этого ток протекает через двигатель справа налево, как показано в части 2 и на рисунке 3. А пока рассмотрим двигатель вращается по часовой стрелке. Теперь, если выключатели A1 и A2 разомкнуты, B1 и B2 замкнуты. Ток, проходящий через двигатель, протекает слева направо, как показано в 1 -й части на фиг.3. Это направление потока тока противоположно первому, и поэтому мы видим противоположный потенциал на клемме двигателя по отношению к первому, поэтому двигатель вращается против часовой стрелки.Вот как работает H-BRIDGE. Однако маломощные двигатели могут приводиться в движение H-BRIDGE IC L293D.
L293D — это микросхема H-BRIDGE, предназначенная для привода двигателей постоянного тока малой мощности и показанная на рисунке. Эта микросхема состоит из двух h-мостов, поэтому она может управлять двумя двигателями постоянного тока. Таким образом, эта микросхема может быть использована для управления двигателями робота от сигналов микроконтроллера.
Теперь, как обсуждалось ранее, эта микросхема может изменять направление вращения двигателя постоянного тока. Это достигается путем контроля уровней напряжения на входах INPUT1 и INPUT2.
Разрешить контакт | Входной контакт 1 | Входной контакт 2 | Направление двигателя |
Высокий | Низкий | Высокий | Поверните направо |
Высокий | Высокий | Низкий | Поверните налево |
Высокий | Низкий | Низкий | Стоп |
Высокий | Высокий | Высокий | Стоп |
Так, как показано на рисунке выше, для вращения по часовой стрелке 2A должно быть высоким, а 1A — низким.Точно так же для против часовой стрелки 1A должен быть высоким, а 2A должен быть низким.
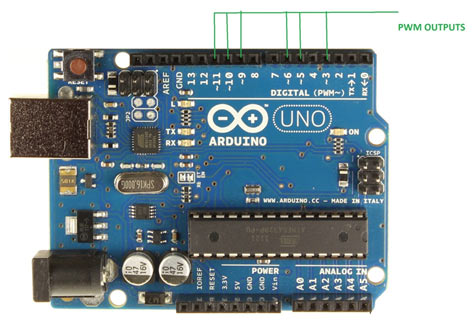
Как показано на рисунке, Arduino UNO имеет 6-ШИМ каналы, поэтому мы можем получить ШИМ (переменное напряжение) на любом из этих шести контактов. В этом уроке мы будем использовать PIN3 в качестве выхода ШИМ.
Аппаратные средства: ARDUINO UNO, источник питания (5 В), конденсатор 100 мкФ, светодиод, кнопки (две части), резистор 10 кОм (две части).
Программное обеспечение: Arduino IDE (Arduino nightly).
принципиальная схема
Цепь подключена к макету в соответствии с принципиальной схемой, показанной выше. Однако следует обратить внимание во время подключения светодиодных клемм. Хотя кнопки показывают эффект отскока в этом случае, они не вызывают значительных ошибок, поэтому нам не нужно беспокоиться на этот раз.
ШИМ от UNO — это просто, в обычных случаях настроить контроллер ATMEGA для сигнала ШИМ непросто, нам нужно определить множество регистров и настроек для точного сигнала, однако в ARDUINO нам не приходится иметь дело со всеми этими вещами. ,
По умолчанию все заголовочные файлы и регистры предварительно определены в ARDUINO IDE, нам просто нужно вызвать их, и у нас будет ШИМ-выход на соответствующем выводе.
Теперь для получения ШИМ-выхода на соответствующем выводе нам нужно поработать над тремя вещами:
|
Сначала нам нужно выбрать выходной контакт ШИМ из шести контактов, после этого нам нужно установить этот вывод как выходной.
Далее нам нужно включить функцию ШИМ в UNO, вызвав функцию «analogWrite (pin, value)». Здесь «контакт» представляет номер контакта, для которого нам нужен выход ШИМ, мы обозначаем его как «3». Таким образом, на PIN3 мы получаем выход ШИМ.
Значение — рабочий цикл включения, между 0 (всегда выключен) и 255 (всегда включен). Мы собираемся увеличивать и уменьшать это число нажатием кнопки.
UNO имеет максимальное разрешение «8», дальше идти нельзя, поэтому значения от 0 до 255.Однако можно уменьшить разрешение ШИМ с помощью команды «analogWriteResolution ()», введя значение в скобках от 4 до 8, мы можем изменить его значение с четырехбитного ШИМ до восьмибитного ШИМ.
Переключатель для изменения направления вращения двигателя постоянного тока.
,