
ШИМ контроллер | Электроника. Радиотехника
ШИМ контроллер, он же PWM служит для генерации нужного импульса. Сама же аббревиатура ШИМ означает ни что иное, как широтно-импульсная модуляция. От сюда мы с вами делаем заключение, о том, что контроллер, называемый «ШИМом» служит для создания импульса.
Иными словами, шим — это модулятор, который управляет длиной импульса, который подается на первичную обмотку трансформатора.
ШИМ контроллер собственно и управляет шириной (длительностью импульса).
Работает такой контроллер на частоте от 50 до 150 кГц.
https://my.mail.ru//mail/by-vlad2009/video/2/16.html
Выводы ШИМ контроллера
GND — общий ( ground ) — Земля
FB — Обратная связь ( Feedback )
RI —
GATE —
VDD — Питание ШИМ.
SENSE
NC
VFB — FB — Обратная связь ( Feedback )
RI —
GATE —
VDD
ISENSE — SENSE
NC
OUT — Выход HO и LO название для полумостовых схем (Используется только в микросхемах, без встроенного транзистора).
Vcc — Напряжение питания
Vs — Стартовое питание (не у всех микросхем имеется. Питание идет либо со вторичной либо с первичной цепи, через диод и резистор).
U1 — VDD — Питание ШИМ. Браться оно может как с первичной, так и со второй обмотки. ( Vdd — Voltage drain drain )
Шим-контроллер может управлять обычным транзистором, так же существуют ШИМ-контроллеры со встроенным силовым ключом.
ШИМ-контроллер со встроенным силовым ключом
DRAIN, DRN, D — сток полевого транзистора, всегда идет на первичную обмотку трансформатора. К другой стороне этой обмотки подключен +300В.
SOURCE, SRC, S — выводы исток полевого транзистора, к нему подводится минус.
Для подбора аналога шим контроллера требуется знать некоторые данные р нем:
- Корпус
- Распиновка
- Мощность
- частота
Полезные материалы
Обозначение цепей питания в иностранных схемах
https://www.radiokot.ru/articles/49/
https://otvet.mail.ru/question/174019872
Подбор ШИМ контроллеров
Подбор ШИМ контроллеров
https://remont-aud.![]() net/ic_power/
net/ic_power/
Шим — контроллеры. Принцип его работы и проверка мультиметром. ШИМ, PWM контроллер. Схема. Микросхема. Принцип работы. Описание, выводы. Опорное напряжение. Ограничение тока. Мягкий старт
Вот приспичило вам сделать себе могучую светодиодную хреновину, чтобы моргала и переливалась. Да еще в RGB и плавненько так. Собрали вы это дело, поглядели на количество каналов которыми нужно рулить и призадумались…
▌А что не так с ШИМ?
Да все с ним хорошо, только аппаратных каналов обычно всего несколько штук. А программный ШИМ имеет ряд недостатков. Да, можно взять и на базе , используя всего один таймер собрать многоканальный ШИМ, но сколько у нас будет вызовов прерываний?
 Не говоря уже о том, что все эти каналы надо будет при любом изменении скважности заново сортировать по длительности. В общем, тупилово будет еще то.
Не говоря уже о том, что все эти каналы надо будет при любом изменении скважности заново сортировать по длительности. В общем, тупилово будет еще то. ▌Нас спасет BAM
Но решение есть. Зовется этот метод BAM. Суть его в том, что мы включаем нагрузку импульсами, поразрядно, с длительностью равной весу разряда.
В результате мы имеем высокую дискретность, но при этом у нас всего 7 прерываний на любое число каналов. Соответственно разрядам.
Интегрируется все аналогично обычному ШИМу. Но есть ряд нюансов:
- Частота плавает и на малых разрядах она повышается. Для светодиода или грелки это наплевать. А вот двигатель или еще какую нагрузку с реактивными элементами вроде обмоток или емкостей я бы таким сигналом питать не стал.
- При переходе с малых весов к одному большому наблюдается мерцание. Но с этим можно бороться, подробности ниже.
- Выдавать вес лучше с большего к меньшему, так меньше заметно влияние второго пункта.

Микросхемы для импульсных источников питания. Справочник.
Издательство: Додэка.
Очень неплохой справочник. Замечателен тем, что является… самым обычным переводом даташитов. Один в один, картинка в картинку.
Переведенных даташитов там тьма, один только перечень в четыре колонки занимает десяток страниц. Все импульсные микросхемы которые знал там нашел! А что особенно радует, так это то, что есть документация на отечественную комплектуху. С коей вечно проблемы. Если аналог не подберешь, и не дернешь бумагу на него — пиши пропало.
DC-DC преобразование
Для изменения напряжения постоянного тока с минимальными потерями используются DC-DC преобразователи, работающие по принципу Широтно-Импульсной Модуляции (ШИМ , она же PWM по басурмански). Если не читал мои прошлые статьи, где я подробно разжевал принцип работы ШИМ , то я кратенько тебе напомню. Основной принцип тут в том, что напряжение подается не сплошным потоком, как в линейных стабилизаторах, а краткими импульсами и с большой частотой.
Основной принцип тут в том, что напряжение подается не сплошным потоком, как в линейных стабилизаторах, а краткими импульсами и с большой частотой.
То есть у тебя на выходе ШИМ контроллера, например, сначала в течении десяти микросекунд напряжение, к примеру, двенадцать вольт, потом идет пауза. Скажем, те же десять микросекунд, когда на выходе напряжения вообще нет. Затем все повторяется, словно мы быстро-быстро включаем и выключаем рубильник.
Таким образом у нас получаются прямоугольные импульсы. Если вспомнить матан, а конкретно интегрирование, то после интегри
50 оттенков ПНЯ* Аппаратный прием ШИМ-кодированных сигналов микроконтроллерами Microchip / Хабр
* ПНЯ — Периферия Независимая от Ядра в микроконтроллерах Microchip, известная так же как CIP — Core Independent Peripheral.
Предыдущие статьи [1], [2] и [3] были посвящены Периферии Независимой от Ядра (ПНЯ) микроконтроллеров Microchip: конфигурируемым логическим ячейкам, портам ввода/вывода с функцией ограничения тока и АЦП с вычислителем, были показаны некоторые возможности такой периферии.
Весьма часто встречается ШИМ кодирование информации, когда дискретные сигналы, лог.1 и лог.0, закодированы шириной импульса. Рассмотрим вариант приема и декодирования таких сигналов с помощью Периферии Независимой от Ядра PIC контроллеров.
Декодирование ШИМ сигнала датчика AM2302
В DIY проектах часто применяется датчик температуры и влажности DHT22 (AM2302). Датчик имеет 3 вывода, информация передается по одному проводу.
 В ответ на запрос (низкий уровень длительностью примерно 1ms), датчик отвечает стартовым битом, а затем последовательностью из 40 бит, где информация закодирована в длительности импульсов: лог. «0» – импульс 30мк сек, лог. «1» – 70мк сек (типовые значения). Ответ от датчика содержит 5 байт: 2 байта данных о влажности, 2 байта – температуры и 1 контрольный байт.
В ответ на запрос (низкий уровень длительностью примерно 1ms), датчик отвечает стартовым битом, а затем последовательностью из 40 бит, где информация закодирована в длительности импульсов: лог. «0» – импульс 30мк сек, лог. «1» – 70мк сек (типовые значения). Ответ от датчика содержит 5 байт: 2 байта данных о влажности, 2 байта – температуры и 1 контрольный байт.Рис.1. Пояснения к принципу формирования сигнала датчика DHT22.
В сети много примеров работы с такими датчиками на Ардуино. Некоторые реализации библиотек используют конструкции типа:
loopCnt = TIMEOUT;
while(PIN) {
if(--loopCount == 0) return ErrorTimeout;
}
if (loopCnt < cntOne) {
// bit =1
…
} else {
// bit =0
…
}
В подобных реализациях мне видятся следующие проблемы:
— программа на все время измерения (>5мс) «висит» в коде измерения;
— возникновение достаточно длинного прерывания порушит чтение данных с датчика;
— потенциальные проблемы с работой на низкой тактовой частоте микроконтроллера;
Алгоритм программы подобных решений имеет примерно такой вид (см. рис.2)
рис.2)
Рис. 2. Алгоритм программного приема и декодирования сигналов датчика.
Ниже рассматривается вариант аппаратного приема/декодирования протокола с минимальными программными издержками.
Идея заключается в выделении синхроимпульсов из битового потока с последующим направлением исходного сигнала и синхроимпульсов на аппаратный модуль SPI. В этом случае программе микроконтроллера остается лишь забирать последовательно 5 байт данных из SPI.
Частью CIP являются таймера с возможностью запуска по событиям (изменению состояния входа или другой периферии). Т.е. изменение состояния входа может запускать таймер, см. сигнал TMR6 на рис.3. Когда таймер достигает заданного значения, его счет останавливается и таймер находится в состоянии TMR6 = PR6 (PR – регистр периода). Состояние таймера может быть входом для Конфигурируемой Логической Ячейки (CLC, см. часть 1).
Таким образом, с помощью таймера и Логических Ячеек мы можем сформировать сигнал, пригодный для подачи на тактовый вход SCK модуля SPI. Для выделения информации длительность такого клока должна иметь среднее значение между длительностью нуля и единицы. Тогда SPI может фиксировать бит по спаду клока (см. рис.3 сигнал SCK).
Для выделения информации длительность такого клока должна иметь среднее значение между длительностью нуля и единицы. Тогда SPI может фиксировать бит по спаду клока (см. рис.3 сигнал SCK).
Сигнал от датчика будет иметь ложные импульсы, формируемые от запросного и стартового импульсов. Для того чтобы эти импульсы не мешали работе, нужно включать SPI только на время информационных импульсов, или отсечь ненужные импульсы. Эту задачу так же можем решить с помощью CIP.
Другой таймер выступает в роли счетчика импульсов с переключением по спаду: в регистр периода записываем число 2, таймер отсчитывает первые 2 импульса (см. сигнал TMR4 на рис.3) и останавливает счет (см. сигнал EN на рис.3), который через блок логических ячеек разрешает выдачу остальных импульсов на вход SPI.
Рис.3. Диаграммы, поясняющие прием сигнала датчика DHT22.
Логическая функция формирования сигнала SCK реализуется на одной логической ячейке (CLC), полная схема в конфигурации И-ИЛИ приведена на рис. 4.
4.
Выход логической ячейки подключается ко входу SCK, а сигнал датчика DHT22 подключается к MOSI модуля SPI. Все соединения выполняются внутри микроконтроллера (рис.5). Для контроля и отладки сигналы можно вывести на порты микроконтроллера.
Рис.4. Конфигурация логической ячейки CLC в PIC микроконтроллере.
Рис. 5. Полная структура конфигурации периферии.
Если кажется, что 2-х таймеров на задачу декодирования протокола датчика является расточительством ресурсов, то счетчик до двух можно «собрать» на свободных логических ячейках CLC.
Итого, задача декодирования сводится к очень простому алгоритму: инициализируется микроконтроллер и его периферия, при необходимости измерений включается модуль SPI и формируется запрос на измерение (лог. «0» в течение ~1мсек).
Остается считать данные из буфера при возникновении прерывания от SPI.
Рис.6. Алгоритм работы с датчиком DHT22 при использовании ПНЯ.
Рис.7. Сигналы с портов микроконтроллера. Сигнал SSP1IF – прерывания по приему байта модулем SPI.
Сигнал SSP1IF – прерывания по приему байта модулем SPI.
На рис.7 приведена диаграммы сигналов, где:
DHT (dat) – сигнал на сигнальной линии датчика – подаем на вход MOSI модуля SPI;
TMR6 != RP6 – выделенный тактовый сигнал – подаем на SCK модуля SPI;
SSP1IF – сигнал прерываний (готовности данных в буфере SPI) – по сути этот сигнал показывает загрузку ядра микроконтроллера – считывание данных результата.
Декодирование других ШИМ протоколов
Подобные «однопроводные» ШИМ протоколы используются в ИК пультах управления бытовой техникой. Часто при ИК передаче используется кодирование положением импульса, когда длительность постоянная, а пауза переменная. Этот вариант еще называют «Кодирование методом переменной паузы». По сути это то же самое ШИМ кодирование, но с инвертированным сигналом. При наличии логических ячеек сделать инверсию – не проблема, к тому же ИК-приемники и так инвертируют полученный сигнал. На рис.
 8 показаны сигналы после приемника, принятые с двух разных пультов.
8 показаны сигналы после приемника, принятые с двух разных пультов.
Рис.8. Варианты кодирования ИК пультов управления.
Оба пульта имеют различные протоколы, но эти протоколы легко декодируются описанным выше способом, единственное, это необходимо обеспечить определение начала посылки для синхронизации включения SPI, так как ИК приемник может ловить помехи.
Рис. 9. Сигналы декодированные с помощью SPI.
Не все ИК пульты имеют ШИМ кодирование. Часть протоколов, например RC5, имеют фазовое кодирование (манчестерский код, «0» передается как 10, а «1» как 01) [4]. Декодирование манчестерского кода с помощью периферии независимой от ядра мы уже рассматривали ранее в первой части [1].
Итоги
Вместо практически 100% загрузки ЦПУ микроконтроллера для задачи декодирования ШИМ протокола в варианте Arduino (да-да, я в курсе, задачу можно решить эффективнее с помощью модулей захвата или другой периферии), мы перенесли прием информационной посылки в аппаратную часть.
 Фронт входного сигнала запускает таймер, состояние таймера определяет выход блока логических ячеек, выход логической ячейки подается на SPI.
Фронт входного сигнала запускает таймер, состояние таймера определяет выход блока логических ячеек, выход логической ячейки подается на SPI.Использование независимой от ядра периферии позволяет оптимизировать использование ресурсов, часть задач перенести на «железо», упростить код, снизить потребление.
Литература
1. Конфигурируемые Логические Ячейки в PIC контроллерах.
2. 50 оттенков ПНЯ. Порты ввода/вывода
3. 50 оттенков ПНЯ. АЦП и АЦП с вычислителем микроконтроллеров Microchip
4. sbprojects.com/knowledge/ir/rc5.php
Таблицы характеристик шим контроллеров блоков питания. Что такое шим контроллер, как он устроен и работает, виды и схемы
Что вообще такое — инвертор.
Данный узел предназначен для преобразования постоянного тока в переменный. В данном случае мы имеем на входе 310 Вольт постоянного тока, которые надо подать на трансформатор. Но так как трансформаторы не хотят работать на постоянном токе, то и нужен инвертор.
Инвертор состоит из двух основных узлов.
ШИМ контроллера.
А также выходных высоковольтных транзисторов. Попутно весьма кстати попал в кадр трансформатор управления этими транзисторами.
Впрочем инвертор может выглядеть заметно проще, например у известного блока питания.
Микросхема, жменька деталей, вот и весь ШИМ контроллер.
В данном случае схемотехника блока питания, а также его мощность заметно отличаются от предыдущего варианта, потому транзистор всего один.
Еще один вариант, слева конденсаторы входного фильтра, справа трансформатор, между ними инвертор.
Так как на силовом транзисторе выделяется значительная мощность, то чаще всего он устанавливается на радиатор.
Но давайте немного отвлечемся на историю, с чего собственно все начиналось. Возможно конечно начиналось не с этого, потому точнее будет сказать, с чего начинал я.
Как вы понимаете, раньше не было ШИМ контроллеров, а иногда и обычную «кренку» купить была проблема, но прогресс не стоял на месте и радиолюбители пытались заменить большие трансформаторы на импульсные блоки питания.
На схеме показан типичный автогенератор, но были схемы и с простой логикой в качестве генератора импульсов.
Тогда схемы подобных блоков питания часто встречались в журнале Радио в контексте усилителей мощности. Но мое знакомство было на примере блока питания для Синклера. Кстати на фото один из них, который я оставил себе на память:)
Правда вышеприведенная схема требовала подбора транзисторов и в моем случае сильно перегревалась.
Схема с автогенератором считается самой простой, в данном примере она даже не имеет стабилизации выходного напряжения.
При всем современном разнообразии микросхем показанная выше схема также нашла себя в современном мире, в качестве «электронного трансформатора» для галогенных ламп.
Правда постепенно такие лампы заменяют на светодиоды, но все равно электронные трансформаторы довольно популярны, в основном из-за свой простоты и дешевизны.
Уже через довольно большое время подобные схемы получили второе дыхание. Известная фирма International Rectifier выпустила весьма простую микросхему для электронного балласта люминесцентных ламп. Но выяснилось, что данная микросхема отлично работает в качестве задающей для импульсного БП. К ним относятся микросхемы IR2151, IR2153 и подобные.
Известная фирма International Rectifier выпустила весьма простую микросхему для электронного балласта люминесцентных ламп. Но выяснилось, что данная микросхема отлично работает в качестве задающей для импульсного БП. К ним относятся микросхемы IR2151, IR2153 и подобные.
Вообще некоторые радиолюбители делали и стабилизированные блоки питания на базе этой микросхемы, но работает это не всегда корректно.
По сути для этой микросхемы надо только несколько мелких деталей и пара полевиков, вот и вся схема инвертора. Именно с применением этой микросхемы я делал первичный блок питания для своего лабораторного.
Кстати, именно эту микросхему я рекомендую для питания усилителей мощности, как неприхотливую и довольно надежную. А также хочу сказать, что нерегулируемые БП лучше себя ведут в плане шумов.
Так выглядит трехканальный блок питания с мощностью в 300 Ватт и ШИМ регулировкой вентилятора. Более полная информация есть в обзоре лабораторника.
Также довольно часто можно встретить и однотактные блоки питания на основе автогенератора.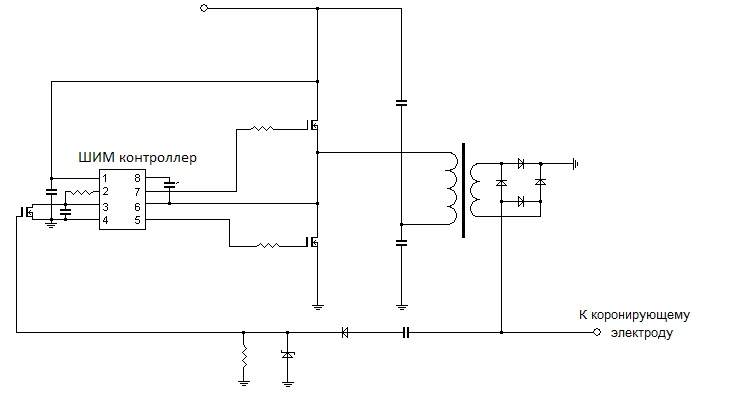 Особенно часто они попадались в АТХ боках в качестве дежурки.
Особенно часто они попадались в АТХ боках в качестве дежурки.
Также они могут попасться и в очень бюджетных зарядных для телефонов. Автогенератор является самым простым типом инверт
Зачем и как контролировать скорость вращения вентилятора для охлаждения электронного оборудования
Введение
Растет интерес к интегральным схемам для управления скоростью охлаждающих вентиляторов в персональных компьютерах и другом электронном оборудовании. Компактные электрические вентиляторы дешевы и используются для охлаждения электронного оборудования более полувека. Однако в последние годы технология использования этих вентиляторов значительно изменилась. В этой статье будет описано, как и почему произошла эта эволюция, и предложены некоторые полезные подходы для дизайнера.
Производство и отвод тепла
Тенденция в электронике, особенно в потребительской электронике, заключается в том, чтобы выпускать изделия меньшего размера с улучшенными комбинациями функций. Следовательно, многие электронные компоненты превращаются в очень маленькие форм-факторы. Наглядный пример — ноутбук. Тонкие и «облегченные» ноутбуки значительно уменьшились в размерах, но их вычислительная мощность сохранилась или увеличилась. Другие примеры этой тенденции включают проекционные системы и телевизионные приставки.Что общего у всех этих систем, помимо значительно меньшего — и все еще уменьшающегося — размера, так это то, что количество тепла, которое они должны рассеивать, не уменьшается; часто увеличивается! В ноутбуке большая часть тепла генерируется процессором; в проекторе большая часть тепла генерируется источником света. Это тепло нужно отводить тихо и эффективно.
Следовательно, многие электронные компоненты превращаются в очень маленькие форм-факторы. Наглядный пример — ноутбук. Тонкие и «облегченные» ноутбуки значительно уменьшились в размерах, но их вычислительная мощность сохранилась или увеличилась. Другие примеры этой тенденции включают проекционные системы и телевизионные приставки.Что общего у всех этих систем, помимо значительно меньшего — и все еще уменьшающегося — размера, так это то, что количество тепла, которое они должны рассеивать, не уменьшается; часто увеличивается! В ноутбуке большая часть тепла генерируется процессором; в проекторе большая часть тепла генерируется источником света. Это тепло нужно отводить тихо и эффективно.
Самый тихий способ отвода тепла — использование пассивных компонентов, таких как радиаторы и тепловые трубки. Однако этого оказалось недостаточно во многих популярных продуктах бытовой электроники, а также они довольно дороги.Хорошая альтернатива — активное охлаждение, введение вентилятора в систему для создания воздушного потока вокруг корпуса и тепловыделяющих компонентов, эффективного отвода тепла из системы. Однако вентилятор является источником шума. Это также дополнительный источник энергопотребления в системе — очень важное соображение, если питание должно подаваться от батареи. Вентилятор также является еще одним механическим компонентом системы, а не идеальным решением с точки зрения надежности.
Однако вентилятор является источником шума. Это также дополнительный источник энергопотребления в системе — очень важное соображение, если питание должно подаваться от батареи. Вентилятор также является еще одним механическим компонентом системы, а не идеальным решением с точки зрения надежности.
Управление скоростью — один из способов ответить на некоторые из этих возражений против использования вентилятора — может иметь следующие преимущества:
- медленная работа вентилятора снижает излучаемый им шум,
- , если вентилятор работает медленнее, он может снизить потребляемую мощность,
- , замедляющая работу вентилятора, увеличивает его надежность и срок службы.
Существует множество различных типов вентиляторов и способов управления ими. Мы обсудим здесь различные типы вентиляторов, а также преимущества и недостатки используемых сегодня методов управления. Один из способов классифицировать поклонников:
- 2-проводные вентиляторы
- Вентиляторы 3-проводные
- Вентиляторы 4-х проводные.

Здесь обсуждаются следующие методы управления вентиляторами:
- без управления вентилятором
- включение / выключение
- линейное (постоянное) управление
- низкочастотная широтно-импульсная модуляция (ШИМ)
- управление высокочастотным вентилятором.
Типы вентиляторов
Двухпроводный вентилятор имеет клеммы питания и заземления. Трехпроводный вентилятор имеет питание, массу и тахометрический выход («тахометр»), который выдает сигнал с частотой, пропорциональной скорости. Четырехпроводной вентилятор имеет питание, массу, выход тахометра и вход привода ШИМ. Короче говоря, ШИМ использует относительную ширину импульсов в последовательности двухпозиционных импульсов для регулировки уровня мощности, подаваемой на двигатель.
Управление двухпроводным вентилятором осуществляется путем регулировки напряжения постоянного тока или ширины импульса в низкочастотной ШИМ. Однако при наличии всего двух проводов сигнал тахометра не всегда доступен. Это означает, что нет никаких указаний на то, насколько быстро вентилятор работает — или действительно, работает ли он вообще. Это форма управления скоростью без обратной связи .
Однако при наличии всего двух проводов сигнал тахометра не всегда доступен. Это означает, что нет никаких указаний на то, насколько быстро вентилятор работает — или действительно, работает ли он вообще. Это форма управления скоростью без обратной связи .
Трехпроводным вентилятором можно управлять с помощью того же привода, что и для двухпроводных вентиляторов — регулируемого постоянного тока или низкочастотной ШИМ. Разница между 2-проводными вентиляторами и 3-проводными вентиляторами заключается в наличии обратной связи от вентилятора для регулирования скорости с обратной связью.Сигнал тахометра показывает, работает ли вентилятор, и его скорость.
Сигнал тахометра, управляемый постоянным напряжением, имеет прямоугольный выходной сигнал, очень похожий на «идеальный тахометр» на Рисунке 1. Он всегда действителен, так как питание постоянно подается на вентилятор. Однако при низкочастотной ШИМ сигнал тахометра действителен только тогда, когда на вентилятор подается питание, то есть во время фазы импульса на . Когда привод ШИМ переключается на фазу off , внутренняя схема генерации тахометрического сигнала вентилятора также отключается.Поскольку выходной сигнал тахометра обычно исходит от открытого стока, он будет иметь высокий уровень, когда привод ШИМ находится в положении от , как показано на рисунке 1. Таким образом, хотя идеальный тахометр отражает фактическую скорость вентилятора, привод ШИМ в эффект «отбивает» выходной сигнал тахометра и может давать ошибочные показания.
Когда привод ШИМ переключается на фазу off , внутренняя схема генерации тахометрического сигнала вентилятора также отключается.Поскольку выходной сигнал тахометра обычно исходит от открытого стока, он будет иметь высокий уровень, когда привод ШИМ находится в положении от , как показано на рисунке 1. Таким образом, хотя идеальный тахометр отражает фактическую скорость вентилятора, привод ШИМ в эффект «отбивает» выходной сигнал тахометра и может давать ошибочные показания.
Чтобы быть уверенным в правильности считывания скорости вращения вентилятора при ШИМ-регулировании, необходимо периодически переключать вентилятор на , чтобы получить полный цикл тахометра.Эта функция реализована в ряде контроллеров вентиляторов Analog Devices, таких как ADM1031 и ADT7460.
В дополнение к сигналам питания, заземления и тахометра, 4-проводные вентиляторы имеют вход ШИМ, который используется для управления скоростью вентилятора. Вместо того, чтобы переключать питание всего вентилятора на и на , переключается только питание катушек возбуждения, делая информацию тахометра доступной постоянно. Включение и выключение катушек создает некоторый коммутационный шум .При работе катушек с частотой более 20 кГц шум перемещается за пределы слышимого диапазона, поэтому типичные сигналы привода вентилятора с ШИМ используют довольно высокую частоту (> 20 кГц). Еще одно преимущество 4-проводных вентиляторов заключается в том, что скорость вращения вентилятора можно регулировать на уровне 10% от полной скорости вентилятора. На рисунке 2 показаны различия между 3-проводными и 4-проводными схемами вентилятора.
Вместо того, чтобы переключать питание всего вентилятора на и на , переключается только питание катушек возбуждения, делая информацию тахометра доступной постоянно. Включение и выключение катушек создает некоторый коммутационный шум .При работе катушек с частотой более 20 кГц шум перемещается за пределы слышимого диапазона, поэтому типичные сигналы привода вентилятора с ШИМ используют довольно высокую частоту (> 20 кГц). Еще одно преимущество 4-проводных вентиляторов заключается в том, что скорость вращения вентилятора можно регулировать на уровне 10% от полной скорости вентилятора. На рисунке 2 показаны различия между 3-проводными и 4-проводными схемами вентилятора.
Управление вентилятором
Нет управления: Самый простой способ управления вентилятором — вообще не использовать его; просто запускайте вентилятор соответствующей мощности на полной скорости 100% времени.Основные преимущества этого — гарантированное безотказное охлаждение и очень простой внешний контур. Однако, поскольку вентилятор всегда включен, его срок службы сокращается, и он потребляет постоянное количество энергии — даже когда охлаждение не требуется. Кроме того, его непрекращающийся шум может раздражать.
Однако, поскольку вентилятор всегда включен, его срок службы сокращается, и он потребляет постоянное количество энергии — даже когда охлаждение не требуется. Кроме того, его непрекращающийся шум может раздражать.
Включение / выключение: Следующим простейшим методом управления вентилятором является термостатический или двухпозиционное управление . Этот метод также очень легко реализовать. Вентилятор включается только тогда, когда необходимо охлаждение, и выключается на остальное время.Пользователь должен установить условия, при которых необходимо охлаждение — обычно, когда температура превышает предварительно установленный порог.
Analog Devices ADM1032 — идеальный датчик для включения / выключения вентилятора с использованием заданного значения температуры. У него есть компаратор, который выдает выходной сигнал THERM, который обычно имеет высокий , но переключает низкий , когда температура превышает программируемый порог. Он автоматически переключается обратно на high , когда температура падает на заданное значение ниже предела THERM. Преимущество этого программируемого гистерезиса заключается в том, что вентилятор не включается / выключается постоянно, когда температура приближается к пороговому значению. На рисунке 3 показан пример схемы, использующей ADM1032.
Преимущество этого программируемого гистерезиса заключается в том, что вентилятор не включается / выключается постоянно, когда температура приближается к пороговому значению. На рисунке 3 показан пример схемы, использующей ADM1032.
Недостатком включения / выключения является то, что он очень ограничен. Когда вентилятор переключается с на , он сразу же начинает раскручиваться до полной скорости, что раздражает и слышно. Поскольку люди быстро привыкают к звуку вентилятора, его выключение также очень заметно.(Его можно сравнить с холодильником на вашей кухне. Вы не замечали шума, который он производил, пока он не выключился.) Таким образом, с акустической точки зрения управление включением / выключением далеко не оптимально.
Линейное управление: на следующем уровне управления вентилятором, линейное управление , напряжение, подаваемое на вентилятор, является переменным. Для более низкой скорости (меньше охлаждения и более тихая работа) напряжение уменьшается, а для более высокой скорости оно увеличивается. У отношений есть ограничения. Рассмотрим, например, вентилятор на 12 В (максимальное номинальное напряжение).Такому вентилятору для запуска может потребоваться минимум 7 В. Когда он действительно начнет вращаться, он, вероятно, будет вращаться примерно на половину своей полной скорости при напряжении 7 В. Из-за необходимости преодоления инерции напряжение, необходимое для запуска вентилятора, выше, чем напряжение, необходимое для его вращения. Так как напряжение, подаваемое на вентилятор, уменьшается, он может вращаться с меньшей скоростью, скажем, до 4 В, после чего он остановится. Эти значения будут отличаться от производителя к производителю, от модели к модели и даже от вентилятора к вентилятору.
У отношений есть ограничения. Рассмотрим, например, вентилятор на 12 В (максимальное номинальное напряжение).Такому вентилятору для запуска может потребоваться минимум 7 В. Когда он действительно начнет вращаться, он, вероятно, будет вращаться примерно на половину своей полной скорости при напряжении 7 В. Из-за необходимости преодоления инерции напряжение, необходимое для запуска вентилятора, выше, чем напряжение, необходимое для его вращения. Так как напряжение, подаваемое на вентилятор, уменьшается, он может вращаться с меньшей скоростью, скажем, до 4 В, после чего он остановится. Эти значения будут отличаться от производителя к производителю, от модели к модели и даже от вентилятора к вентилятору.
ИС линейного управления вентиляторами ADM1028 от Analog Devices имеет программируемый выход и практически все функции, которые могут потребоваться для управления вентиляторами, включая возможность точного взаимодействия с термочувствительным диодом, предусмотренным на микросхемах, таких как микропроцессоры, которые составляют большая часть рассеивания в системе. (Назначение диода — обеспечить быструю индикацию критических температур перехода, избегая всех тепловых задержек, присущих системе. Он позволяет немедленно инициировать охлаждение, основанное на повышении температуры кристалла.) Чтобы поддерживать потребление энергии ADM1028 на минимальном уровне, он работает при напряжении питания от 3,0 В до 5,5 В с выходным напряжением + 2,5 В.
(Назначение диода — обеспечить быструю индикацию критических температур перехода, избегая всех тепловых задержек, присущих системе. Он позволяет немедленно инициировать охлаждение, основанное на повышении температуры кристалла.) Чтобы поддерживать потребление энергии ADM1028 на минимальном уровне, он работает при напряжении питания от 3,0 В до 5,5 В с выходным напряжением + 2,5 В.
на 5 В позволяют регулировать скорость только в ограниченном диапазоне, поскольку их пусковое напряжение близко к уровню полной скорости 5 В. Но ADM1028 можно использовать с 12-вольтовыми вентиляторами, используя простой повышающий усилитель со схемой, подобной показанной на рисунке 4.
Рис. 4. Схема наддува для управления вентилятором 12 В с использованием выходного сигнала ЦАП ADM1028 с линейным управлением вентилятором. Основным преимуществом линейного управления является его бесшумность. Однако, как мы уже отметили, диапазон регулировки скорости ограничен. Например, вентилятор на 12 В с диапазоном управляющего напряжения от 7 В до 12 В может работать на половинной скорости при 7 В. Еще хуже обстоит дело с вентилятором на 5 В. Как правило, для запуска 5-вольтовых вентиляторов требуется 3,5 В или 4 В, но при этом напряжении они будут работать почти на полной скорости с очень ограниченным диапазоном регулирования скорости. Но работа при 12 В с использованием схем, подобных показанной на рисунке 4, далека от оптимума с точки зрения эффективности.Это потому, что повышающий транзистор рассеивает относительно большое количество энергии (когда вентилятор работает при 8 В, падение 4 В на транзисторе не очень эффективно). Требуемая внешняя цепь также относительно дорога.
Еще хуже обстоит дело с вентилятором на 5 В. Как правило, для запуска 5-вольтовых вентиляторов требуется 3,5 В или 4 В, но при этом напряжении они будут работать почти на полной скорости с очень ограниченным диапазоном регулирования скорости. Но работа при 12 В с использованием схем, подобных показанной на рисунке 4, далека от оптимума с точки зрения эффективности.Это потому, что повышающий транзистор рассеивает относительно большое количество энергии (когда вентилятор работает при 8 В, падение 4 В на транзисторе не очень эффективно). Требуемая внешняя цепь также относительно дорога.
ШИМ-управление : В настоящее время распространенным методом управления скоростью вращения вентилятора в ПК является низкочастотный ШИМ-контроль . При таком подходе напряжение, подаваемое на вентилятор, всегда либо нулевое, либо полное, что позволяет избежать проблем, возникающих при линейном управлении при более низких напряжениях.На рис. 5 показана типичная схема управления, используемая с выходом ШИМ терморегулятора ADT7460.![]()
Основным преимуществом этого метода привода является то, что он простой, недорогой и очень эффективный, поскольку вентилятор либо полностью на , либо полностью на .
Недостатком является то, что информация тахометра прерывается управляющим сигналом ШИМ, так как питание не всегда подается на вентилятор. Информация о тахометре может быть получена с помощью метода, называемого растягивания импульсов — включения вентилятора на время, достаточное для сбора информации о тахометре (с возможным увеличением слышимого шума).На рис. 6 показан случай растяжения импульса.
Рисунок 6. Растяжение импульса для сбора тахометрической информации. Еще одним недостатком низкочастотной ШИМ является шум коммутации. При постоянном включении и выключении фанкойлов может присутствовать слышимый шум. Чтобы справиться с этим шумом, новейшие контроллеры вентиляторов Analog Devices предназначены для управления вентилятором с частотой 22,5 кГц, что находится за пределами слышимого диапазона. Схема внешнего управления проще с высокочастотной ШИМ, но ее можно использовать только с 4-проводными вентиляторами.Хотя эти вентиляторы относительно новы на рынке, они быстро становятся все более популярными. На рисунке 7 изображена схема, используемая для высокочастотной ШИМ.
Схема внешнего управления проще с высокочастотной ШИМ, но ее можно использовать только с 4-проводными вентиляторами.Хотя эти вентиляторы относительно новы на рынке, они быстро становятся все более популярными. На рисунке 7 изображена схема, используемая для высокочастотной ШИМ.
Сигнал PWM напрямую управляет вентилятором; приводной полевой транзистор встроен в вентилятор. Уменьшая количество внешних компонентов, этот подход значительно упрощает внешнюю схему. Поскольку управляющий сигнал ШИМ подается непосредственно на катушки вентилятора, электроника вентилятора всегда включена, а сигнал тахометра всегда доступен.Это устраняет необходимость в растягивании импульсов и шум, который он может производить. Коммутационный шум также устраняется или значительно снижается, поскольку катушки переключаются с частотой за пределами слышимого диапазона.
Резюме
С точки зрения акустического шума, надежности и энергоэффективности наиболее предпочтительным методом управления вентилятором является использование высокочастотного (> 20 кГц) ШИМ-привода.
Помимо устранения необходимости зашумленного растяжения импульсов и коммутационного шума, связанного с низкочастотной ШИМ, он имеет гораздо более широкий диапазон управления, чем линейное управление.Благодаря высокочастотной ШИМ вентилятор может работать на скорости до 10% от полной скорости, в то время как тот же вентилятор может работать не менее чем на 50% от полной скорости при линейном управлении. Он более энергоэффективен, потому что вентилятор всегда либо полностью включен, либо полностью выключен. (Когда полевой транзистор выключен или находится в состоянии насыщения, его рассеивание очень мало, что устраняет значительные потери в транзисторе в линейном случае.) Это тише, чем при постоянном включении или включении / выключении, поскольку вентилятор может работать на более низких скоростях. — это можно постепенно менять.Наконец, более медленная работа вентилятора также увеличивает срок его службы, повышая надежность системы.
| Метод управления | Преимущества | Недостатки |
Вкл. / Выкл. / Выкл. | Недорого | Наихудшие акустические характеристики — вентилятор всегда работает. |
| Линейный | Самый тихий | Дорогая схема Неэффективная — потеря мощности в схеме усилителя |
| Низкочастотный ШИМ | Эффективный Широкий диапазон регулирования скорости при измерении скорости | Шум коммутации вентилятора Требуется растяжение импульса |
| Высокочастотный ШИМ | Эффективный Хорошая акустика, почти как линейная.Недорогая внешняя цепь Широкий диапазон регулирования скорости | Необходимо использовать 4-проводные вентиляторы |
Регулятор скорости двигателя постоянного тока PWM 0–100% Защита от перегрузки по току (вторая цепь) «Бесщеточные двигатели, 3-фазные инверторы, схемы
Это самая дешевая схема контроллера скорости двигателя постоянного тока, которую вы можете найти в Интернете.
Раньше я пробовал использовать NE555 и другие схемы, но результат был каждый раз в закороченных МОП-транзисторах 😀 и невозможности остановки GO KART (не очень хорошо, если у вас нет большого красного выключателя ) .
Ниже я представлю свой контроллер скорости двигателя постоянного тока, способный регулировать скорость (ШИМ) от 0 до 100% и частоту от ~ 400 Гц до 3 кГц, на основе компаратора LM339.
Источник питания от 14 до 30 вольт, можно расширить до практически любого значения с небольшими изменениями.
Начиная с R15 VR 10k вы можете регулировать скорость от 0 до 100%
С R14 VR 100k можно регулировать частоту.
Если перемычка JP1 закорочена, вы можете настроить частоту ШИМ от 400 Гц до 3 кГц.Если перемычка открыта, частота фиксируется на 100 Гц.
Схема разработана в Eagle cad 6.2
Вы можете использовать практически любой MOSFET канала N. Полевые транзисторы будут установлены на радиаторе, если сила тока выше 2-5 ампер.
Возможно увеличить напряжение питания до любого значения, если вы отделите питание логической схемы от питания нагрузки и МОП-транзисторов
Это мой второй прототип контроллера мотора постоянного тока
В зависимости от значения Rds ON MOSFET вам понадобится радиатор большего или меньшего размера.
Провода должны иметь диаметр не менее 12 AWG для нагрузки 30–35 А.
По любым вопросам вы можете задать мне в любое время по электронной почте, указанной в меню «О программе».
Успех с схемой.
Это испытание схемы в реальных условиях.
Качественный улучшенный ШИМ-контроллер на базе микросхемы MC33035.
Схема:
Орел 6.1 дизайн.
Я использовал в качестве драйвера mosfet микросхему TC4452, способную выдавать 12 ампер.
Я использовал эту схему в сочетании с силовым каскадом, состоящим из 10 МОП-транзисторов параллельно, со всеми затворами, подключенными через резистор 10 шт. По 20 Ом к выходу драйвера IC.
Для схемы измерения тока я использовал датчик Allegro ACS758
50-200A датчик тока IC
ИС датчиков тока в корпусе Allegro CA и CB представляют собой полностью интегрированные датчики тока.Они содержат первичный провод, концентрирующий ферромагнитный сердечник и аналоговый выход с линейным эффектом Холла в одном корпусе ИС. Типичное сопротивление проводника составляет 100 мкОм для сверхнизких потерь мощности при измерении тока до 200 А. Эти датчики относятся к автомобильным устройствам, которые могут поглощать тепло и обеспечивать высокоточное измерение тока разомкнутого контура в самых суровых условиях эксплуатации.
Среднетоковые устройства Allegro намного меньше громоздких трансформаторов тока и обладают дополнительным преимуществом, позволяющим определять как переменный, так и постоянный ток.Конструкция корпуса также обеспечивает гальваническую развязку до 3000 VRMS и может использоваться во многих линейных приложениях.
Доступ к датчику температуры в вашем компьютере
SpeedFan — это программа, которая контролирует напряжений , скорости вращения вентилятора и температуры в компьютерах с аппаратными микросхемами монитора. SpeedFan может даже получить доступ к S.M.A.R.T. информация и шоу температура жесткого диска .SpeedFan также поддерживает диски SCSI . SpeedFan может даже изменить системную шину на некотором оборудовании (но это следует рассматривать как бонусную функцию).
SpeedFan имеет доступ к цифровым датчикам температуры и может изменять скорость вращения вентилятора соответственно, тем самым уменьшая шум.
SpeedFan отлично работает с Windows 9x, ME, NT, 2000, 2003, XP, Vista, Windows 7, 2008, Windows 8, Windows 10 и Windows Server 2012 . Он также работает с 64-битной Windows. SpeedFan может получить доступ к датчикам температуры, доступным на вашей материнской плате и на вашем видео nVidia.
карта.Наиболее широко доступны температуры от набора микросхем, процессора, окружающей среды и от
силовая схема. Современные процессоры могут сообщать о своей внутренней температуре. Многоядерные процессоры часто могут сообщать
температуры от каждого отдельного ядра. SpeedFan может получить доступ к этим показаниям и сообщить об изменениях. Более мощное оборудование (материнские платы, процессоры, видеокарты и жесткие диски) часто требует большей мощности.
SpeedFan может даже изменить системную шину на некотором оборудовании (но это следует рассматривать как бонусную функцию).
SpeedFan имеет доступ к цифровым датчикам температуры и может изменять скорость вращения вентилятора соответственно, тем самым уменьшая шум.
SpeedFan отлично работает с Windows 9x, ME, NT, 2000, 2003, XP, Vista, Windows 7, 2008, Windows 8, Windows 10 и Windows Server 2012 . Он также работает с 64-битной Windows. SpeedFan может получить доступ к датчикам температуры, доступным на вашей материнской плате и на вашем видео nVidia.
карта.Наиболее широко доступны температуры от набора микросхем, процессора, окружающей среды и от
силовая схема. Современные процессоры могут сообщать о своей внутренней температуре. Многоядерные процессоры часто могут сообщать
температуры от каждого отдельного ядра. SpeedFan может получить доступ к этим показаниям и сообщить об изменениях. Более мощное оборудование (материнские платы, процессоры, видеокарты и жесткие диски) часто требует большей мощности. Больше мощности приводит к большему рассеиванию тепла. Правильный воздушный поток внутри компьютерного шкафа помогает
поддерживать низкие температуры.Внутри компьютеров есть вентиляторы, которые создают такой воздушный поток. SpeedFan может
сообщать о скорости каждого вентилятора и даже изменять их скорость в зависимости от текущей температуры.
Это снижает уровень шума и улучшает работу компьютера. SpeedFan может получить доступ к напряжениям, сообщаемым оборудованием. Это может помочь выявить странные проблемы
например, при перезагрузке компьютеров под нагрузкой. Обратите внимание, что SpeedFan сообщает о напряжениях.
согласно официальной документации. Иногда производители оборудования используют нестандартные схемы.В
в FAQ вы можете найти дополнительную информацию по этой теме. Практически каждый жесткий диск может сообщать набор данных о своем здоровье и состоянии. Это называется
S.M.A.R.T .. На основе отчетных данных отказ жесткого диска часто можно обнаружить на ранней стадии. Жесткий диск
температура также может быть считана, и полезно определить компоненты перегрева, которые могут снизить
надежность ваших ценных данных. SpeedFan предлагает уникальную функцию (называемую «Углубленный онлайн-анализ»).
который сравнивает данные SMART вашего жесткого диска с моделью, полученной из миллионов отчетов.Это помогает
лучше определить, когда конкретный жесткий диск находится за пределами «нормальных» значений. SpeedFan может сообщать данные о состоянии и статистические значения, возвращаемые жесткими дисками SCSI. Такие данные
также содержит температуру жесткого диска. Температура жесткого диска положительно коррелирует с жестким диском
неудачи. Это причина того, почему эта информация так важна. Данные SMART с жестких дисков, подключенных к контроллерам RAID (программным или аппаратным), сложнее
быть прочитанным. SpeedFan улучшает поддержку RAID, и в настоящее время он правильно поддерживает программный RAID (предлагается
под Windows), контроллеры ARECA, CSMI и AMCC 3ware.
Больше мощности приводит к большему рассеиванию тепла. Правильный воздушный поток внутри компьютерного шкафа помогает
поддерживать низкие температуры.Внутри компьютеров есть вентиляторы, которые создают такой воздушный поток. SpeedFan может
сообщать о скорости каждого вентилятора и даже изменять их скорость в зависимости от текущей температуры.
Это снижает уровень шума и улучшает работу компьютера. SpeedFan может получить доступ к напряжениям, сообщаемым оборудованием. Это может помочь выявить странные проблемы
например, при перезагрузке компьютеров под нагрузкой. Обратите внимание, что SpeedFan сообщает о напряжениях.
согласно официальной документации. Иногда производители оборудования используют нестандартные схемы.В
в FAQ вы можете найти дополнительную информацию по этой теме. Практически каждый жесткий диск может сообщать набор данных о своем здоровье и состоянии. Это называется
S.M.A.R.T .. На основе отчетных данных отказ жесткого диска часто можно обнаружить на ранней стадии. Жесткий диск
температура также может быть считана, и полезно определить компоненты перегрева, которые могут снизить
надежность ваших ценных данных. SpeedFan предлагает уникальную функцию (называемую «Углубленный онлайн-анализ»).
который сравнивает данные SMART вашего жесткого диска с моделью, полученной из миллионов отчетов.Это помогает
лучше определить, когда конкретный жесткий диск находится за пределами «нормальных» значений. SpeedFan может сообщать данные о состоянии и статистические значения, возвращаемые жесткими дисками SCSI. Такие данные
также содержит температуру жесткого диска. Температура жесткого диска положительно коррелирует с жестким диском
неудачи. Это причина того, почему эта информация так важна. Данные SMART с жестких дисков, подключенных к контроллерам RAID (программным или аппаратным), сложнее
быть прочитанным. SpeedFan улучшает поддержку RAID, и в настоящее время он правильно поддерживает программный RAID (предлагается
под Windows), контроллеры ARECA, CSMI и AMCC 3ware.