
какие они бывают / Блог компании НПФ ВЕКТОР / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
 Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т. п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным).
 Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент. Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент. Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение.
Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.

И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением.
 Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).

На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись.
 И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям).
 Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т. п.
п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т. п.). Какая же электрическая машина переменного тока может с ним поспорить?
п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
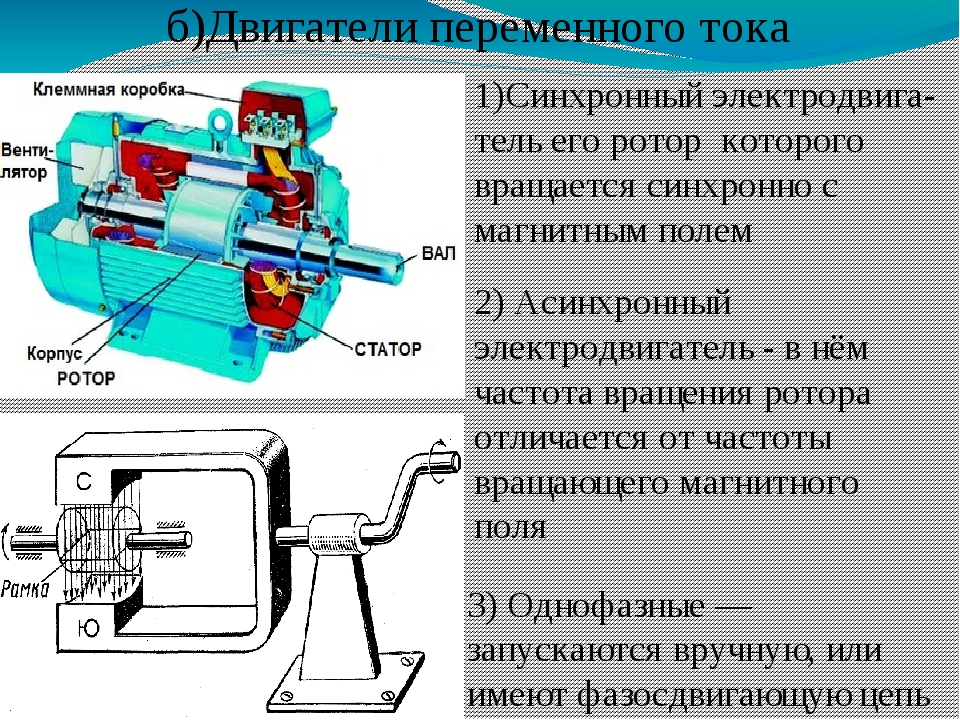
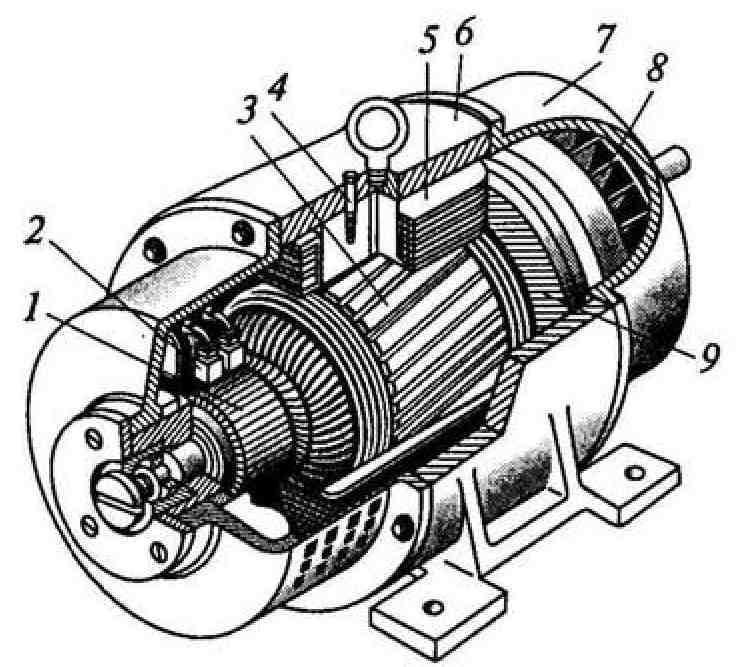
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
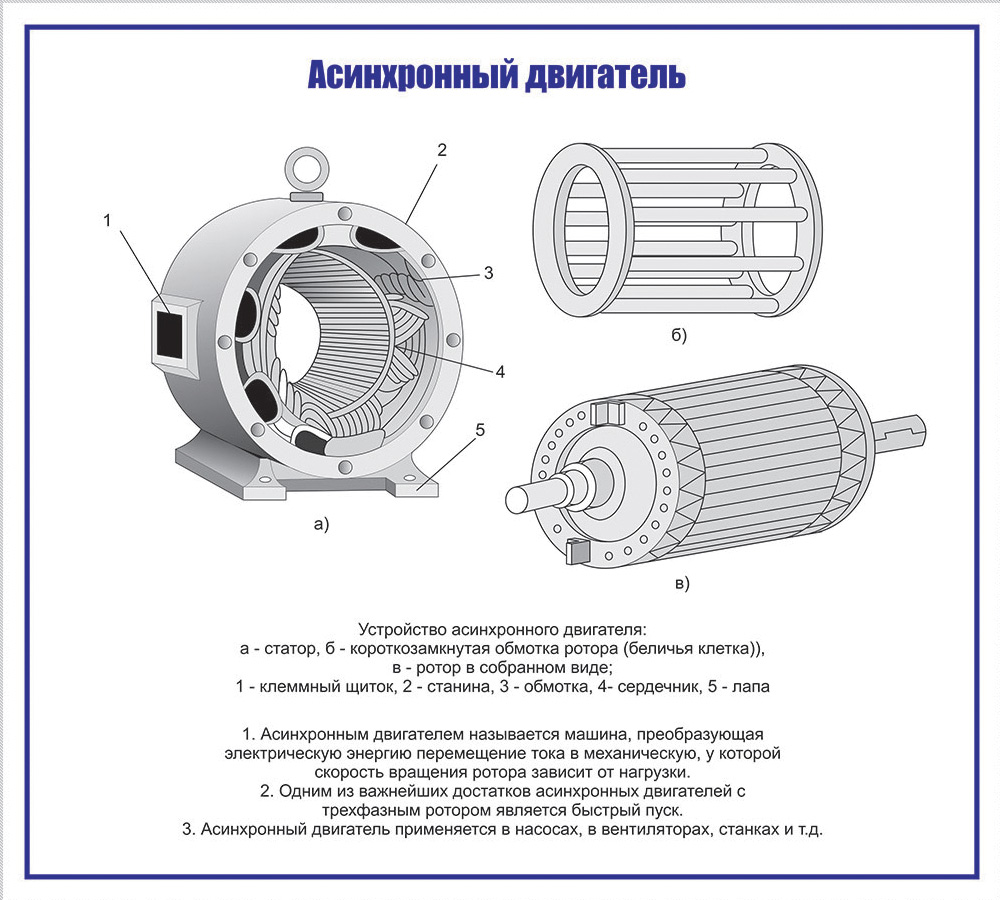
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
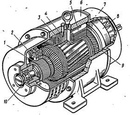
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора.
 Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.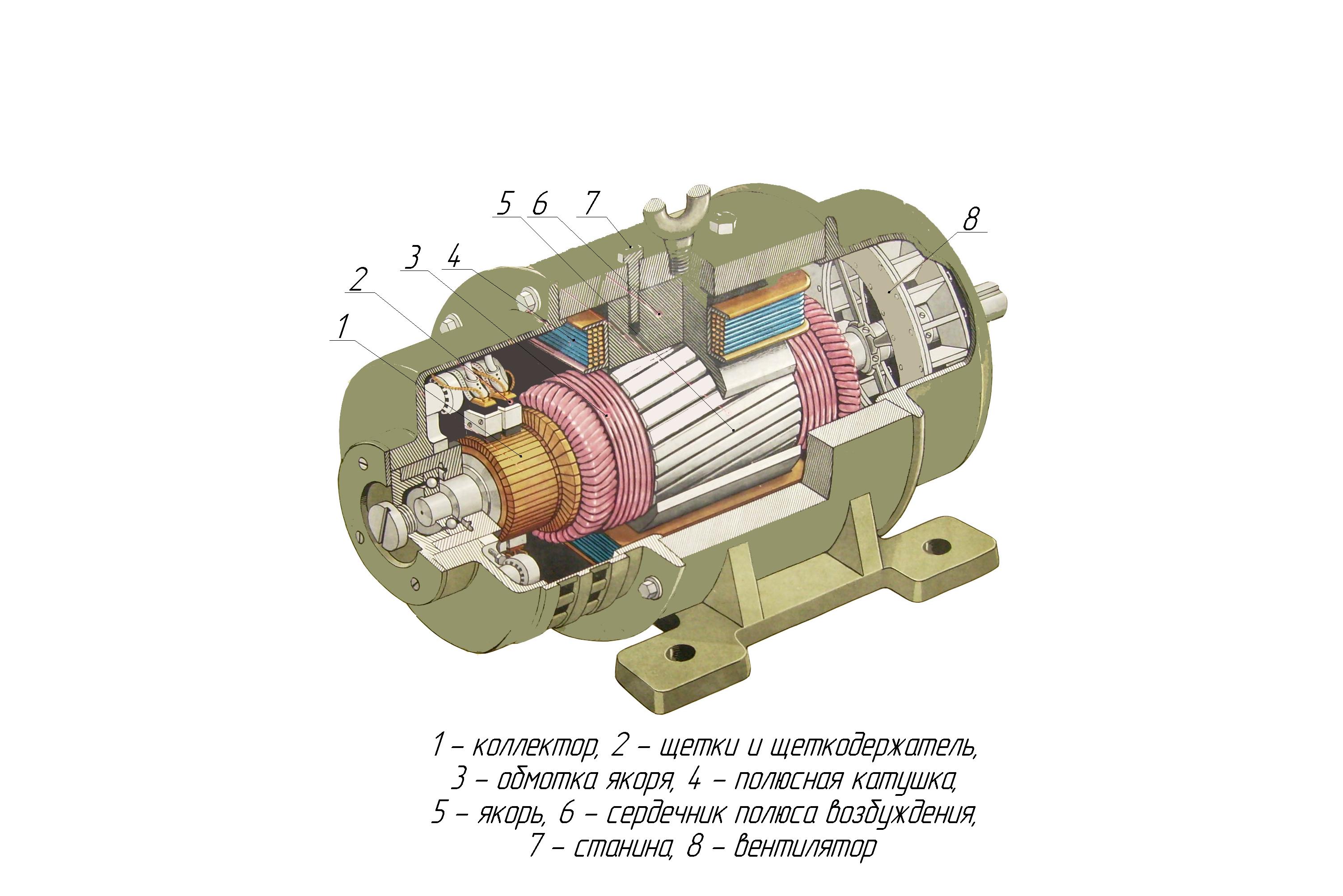
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток.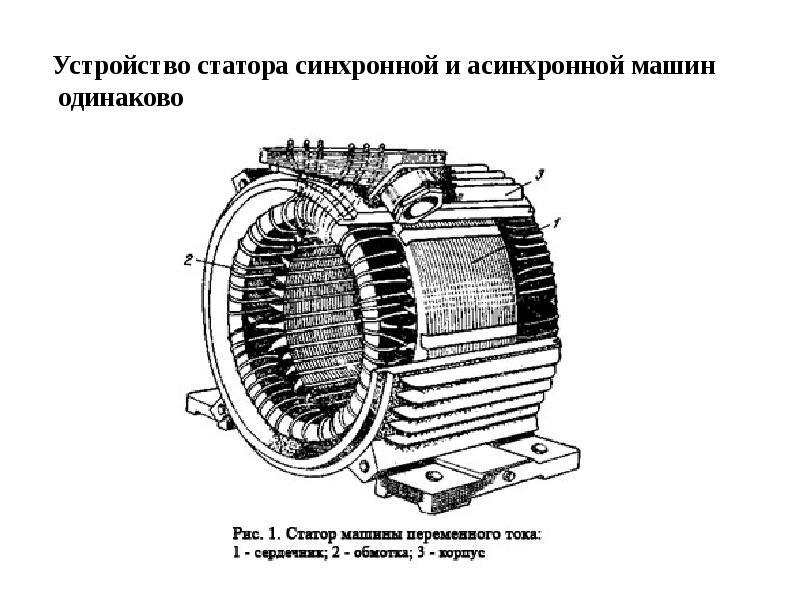 Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.

- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
Электродвигатель: понятие, типы
Электродвигатель — это электрическая машина, в которой электрическая энергия преобразуется в механическую. Существует несколько типов электродвигателей: синхронные, асинхронные и двигатели постоянного тока.
Синхронные двигатели
Синхронные двигатели имеют большую мощность (50-100кВт и более), по сравнению с другими двигателями, применяются на металлургических заводах, в шахтах и других предприятиях, служат для приведения в движения насосов, компрессоров, вентиляторов, двигательно-генераторных установок и др.
Особенностью синхронных электродвигателей определяющей их функциональные возможности и области применения, является постоянство средней частоты вращения при неизменной частоте, амплитуде напряжения питания и колебания момента нагрузки. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность работы при аварийных понижениях напряжения. Большой воздушный зазор и применение постоянных магнитов делает КПД синхронных двигателей выше.
Синхронный двигатель состоит из неподвижного статора и вращающегося ротора. В пазах статора размещена обмотка переменного тока, получающая питание от сети, а в роторе – обмотка постоянного тока. Электродвигатели вращают, ротор синхронно с магнитным полем питающего напряжения. Расположенная на роторе обмотка возбуждения получает питание от источника постоянного тока через контактные кольца. В основном применяются на приводах большой мощности. Мощность такого электродвигателя достигает несколько десятков мегаватт.
Мощность такого электродвигателя достигает несколько десятков мегаватт.
Имея столько достоинств, синхронные двигатели имеют ограничение в применении — сложностью конструкций, наличием возбудителя, высокой ценой и сложностью пуска.
Асинхронные двигатели
Асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. Электродвигатели мощностью больше 0,5 кВт обычно выполняются трехфазными, а при меньшей мощности однофазными.
Асинхронные электродвигатели применяются в станкостроении, сельском хозяйстве, деревообрабатывающей и металлообрабатывающей промышленности, строительной технике и др. Такие электродвигатели давно известны отечественному рынку. Эти электродвигатели имеют не высокую стоимость, неприхотливы в обслуживании и просты в конструкции.
При выборе асинхронного электродвигателя необходимо учитывать два фактора: КПД преобразования энергии и тип исполнения агрегата. Существует множество аналогов электродвигателей марки АИР (АИР марка электродвигателей, которая не привязана к определенному заводу), например новые современные электродвигателе 5АИ. В работе этого оборудования используются менее шумные подшипники, повышенная степень защиты: исполнение IP55, резьбовое отверстие в торце вала и др.
Существует множество аналогов электродвигателей марки АИР (АИР марка электродвигателей, которая не привязана к определенному заводу), например новые современные электродвигателе 5АИ. В работе этого оборудования используются менее шумные подшипники, повышенная степень защиты: исполнение IP55, резьбовое отверстие в торце вала и др.
Принцип действия двигателя основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трехфазного переменного тока по обмоткам статора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля, при условии, что частота вращения ротора меньше частоты вращения поля. Асинхронные электродвигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Двигатели постоянного тока
Принцип работы основан на электромагнитном преобразовании энергии. Широко применяются в промышленности, транспортных и других установках, где требуется плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
Различаются двигатели с параллельным, независимым, последовательным и смешанным возбуждением.
- Двигатели постоянного тока с независимым или параллельным возбуждением, подключенные к сети с постоянным напряжением, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой. Двигатели с параллельным возбуждением имеют параллельное подключение обмотки возбуждения с обмоткой якоря к сети. Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением.
 Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя.
Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. - Двигатели с последовательным возбуждением широко применяются в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.).
- Двигатель со смешанным возбуждением, благодаря магнитному потоку создает совместное действие двух обмоток возбуждения – параллельной и последовательной.
Типы электродвигателей. Какие бывают электродвигатели
Современный мир сложно представить без электродвигателей. Экологичные, эффективные, компактные моторы устанавливают в автомобильный и железнодорожный транспорт, станки, бытовое и промышленное оборудование, инструмент. При выборе модели электродвигателя учитывают конструктивные особенности, от которых зависят мощностные характеристики электропривода, уровень производимого шума, эксплуатационные характеристики.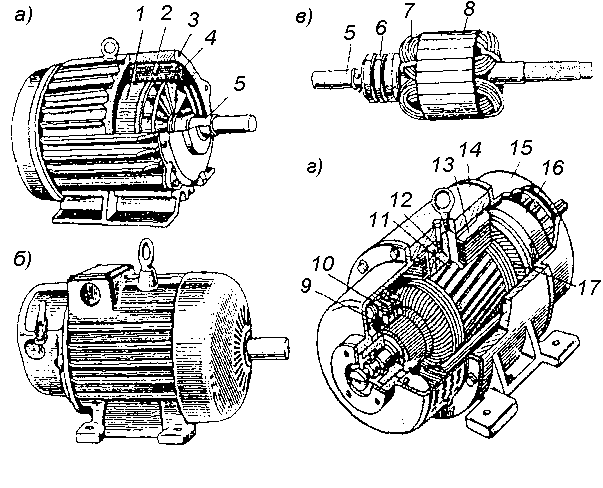
Что такое электродвигатель
По сути, это машина, преобразующая электрическую энергию в механическую. Происходит вращение электрического контура в магнитном поле под силой магнитной индукции. Из определения понятно, что в каждом из двигателей имеется:
- неподвижный элемент, называемый статором, он создаёт электромагнитное поле;
- подвижная конструкция (ротор) – это рамка или катушка, на которую действует вращательный момент магнитного поля.
Движение ротора относительно статора бывает:
- линейным, вернее, возвратно-поступательным, в этом случае ротор и статор располагаются в одной плоскости;
- вращательным, механическое усилие можно измерить числом оборотов в минуту.
Имея одинаковый принцип преобразования энергии, электродвигатели различаются строением роторной и статорной части, способу создания электромагнитного поля.

Какие бывают электродвигатели
Все электроприводы классифицируют на две основные группы по типу электропитания: работающие от постоянного и переменного тока:
- Двигатели постоянного тока устанавливаются на транспорт, буровые установки, грузовые подъёмники, пассажирские лифты, электроинструмент, станки, экскаваторы, другую спецтехнику, где необходимо регулировать скорость вращения приводного вала в большом диапазоне. Моторы отличаются высоким КПД, большой мощностью, нагружаемостью, обычно оснащаются электроникой для управления.
- Двигатели переменного тока считаются универсальными, по конструкции проще, чем электродвигатели постоянного тока, надёжны, неприхотливы. В бытовой и промышленной технике, где постоянная нагрузка, устанавливают практичные приводы переменного тока.
Наибольшей популярностью пользуются приводы, подключаемые к стандартной электросети.

Двигатели постоянного тока
Классифицируются по типу коллекторно-щеточного узла и характеру возбуждения.
- В коллекторных переключение полярности обмоток осуществляется специальным механизмом с контактными щётками, которые быстро изнашиваются, перегреваются, обгорают. К тому же при использовании щёточных контактов возникают искры и электропомехи.
- В бесколлекторных происходит самосинхронизация частотности крутящего момента, электродвигатели более экономичные, в них нет щёточных контактов.
- При независимом возбуждении контакты обмотки подключаются к аккумулятору или выпрямителю. Скорость вращения рамки регулируется реостатом, вмонтированным в обмотки возбуждения. Двигатели рассчитаны на небольшую нагрузку, при резком снижении сопротивления выходят из строя.
- Параллельное подключение ротора и обмотки, возбуждающей электромагнитное поле, практикуется в приводах с жёсткими режимами эксплуатации за счёт разницы силы тока в обмотке и якоре.
 Двигатель подключают к вентиляторам, продолжительно работающим станкам.
Двигатель подключают к вентиляторам, продолжительно работающим станкам. - Двигатели с последовательным возбуждением рекомендуются для электротранспорта. Электродвигатель запускается только под нагрузкой, не работает на холостых оборотах.
- Смешанное возбуждение подразумевает монтаж двух обмоток на каждом из полюсов. Отличительный признак такого двигателя – реверсивное движение при смене полярности. Для регулировки в электросхему включают резисторы.
- Серводвигатели действуют по принципу использования отрицательной обратной связи, способны выдавать высокие обороты. Разработаны для поточных линий, высокопроизводительных станков.
- Линейные двигатели с возвратно-поступательным движением ротора устанавливаются в прессах, молотах, механизмах подачи. Помогают избежать установки передаточных устройств, червячных передач.
Коллекторно-щёточные узлы в современных моделях модифицированы, для контактов используют износостойкие композиты.
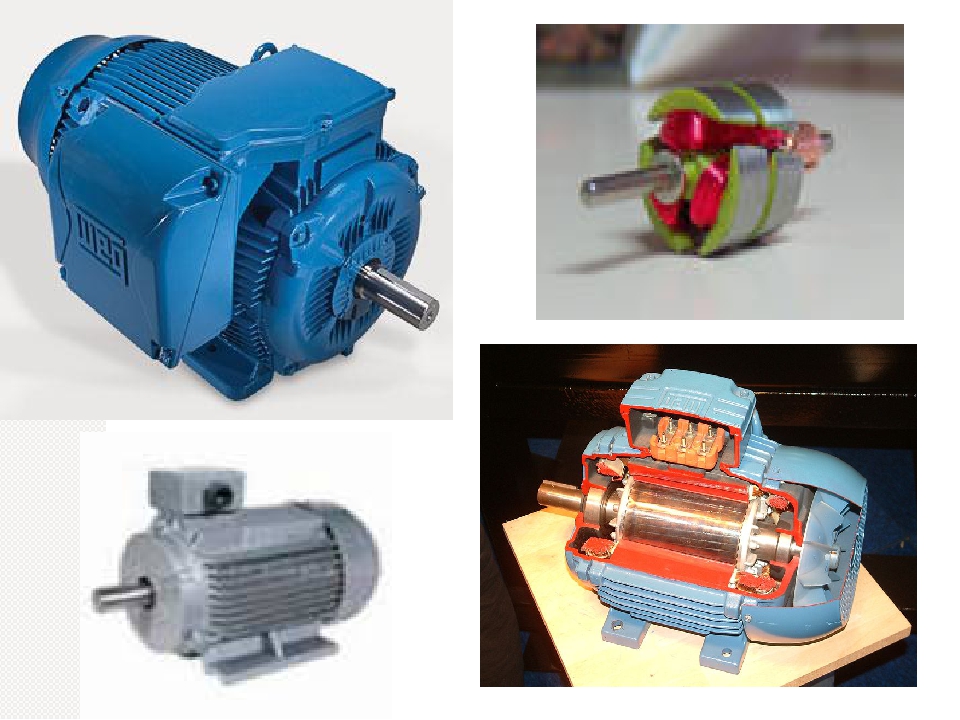
Двигатели переменного тока
Широкий модельный ряд включает моторы, работающие от однофазной и трёхфазной электрической сети.
Основные виды:
- Синхронные отличаются одинаковой частотой вращения магнитного момента и рамки, поэтому работают с постоянной скоростью. Приводы подключают к нагнетателям, компрессорному оборудованию, насосам.
- В асинхронных разная частота вращения создаётся за счёт фазного и короткозамкнутого подключения возбуждающих обмоток и ротора. За счёт частотной разницы можно регулировать скорость вращения приводного вала.
- Шаговые двигатели преобразуют электроимпульсы дискретно, с определённым шагом. Моторы при незначительных размерах характеризуются высокой продуктивностью. Устанавливаются в процессорные вентиляторы, другую офисную технику.
Зная особенности электродвигателей, можно выбрать надёжную бытовую технику или электроинструмент.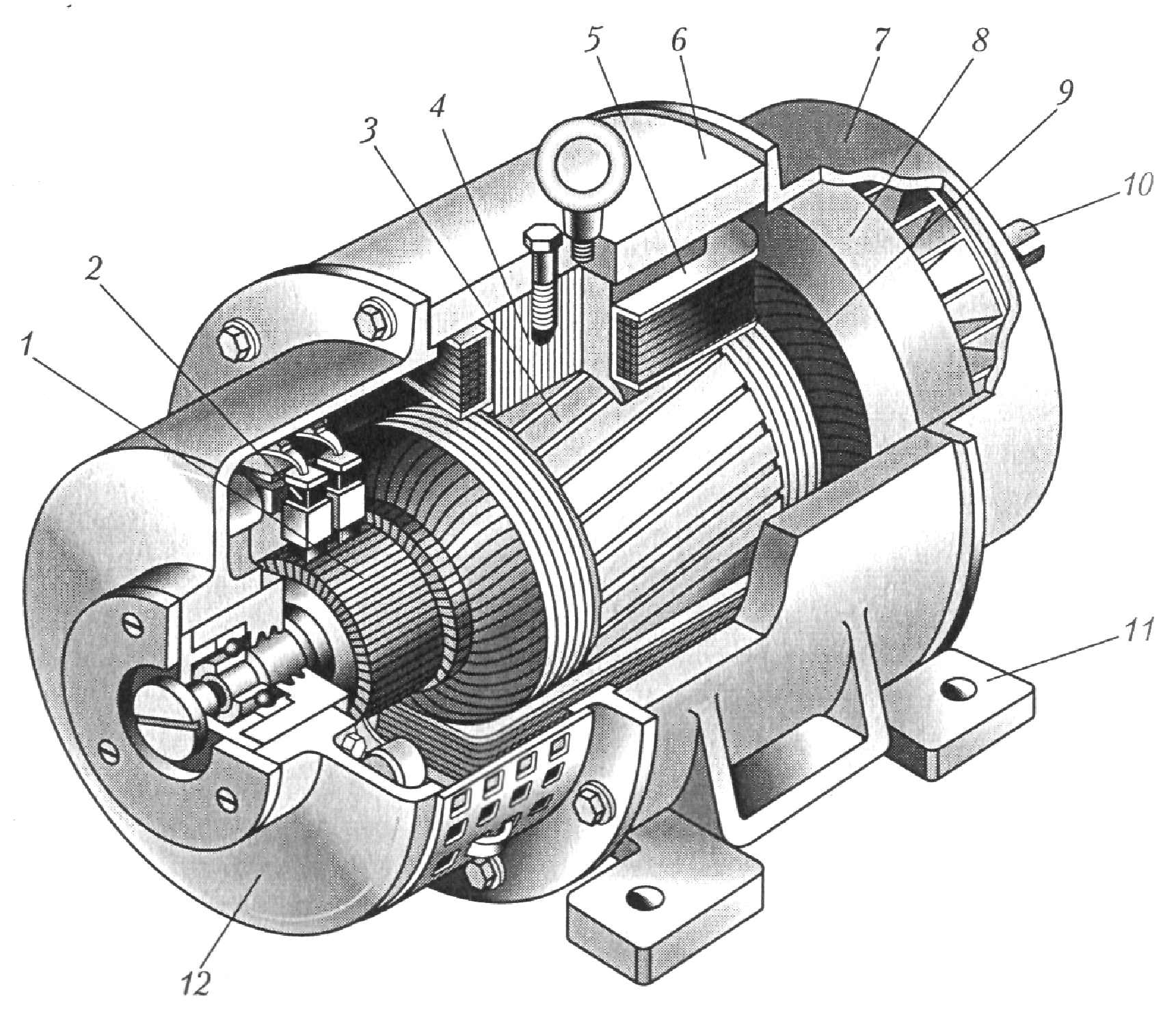
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Двигатели разделяются на:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока
Различают следующие виды электродвигателей:
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей.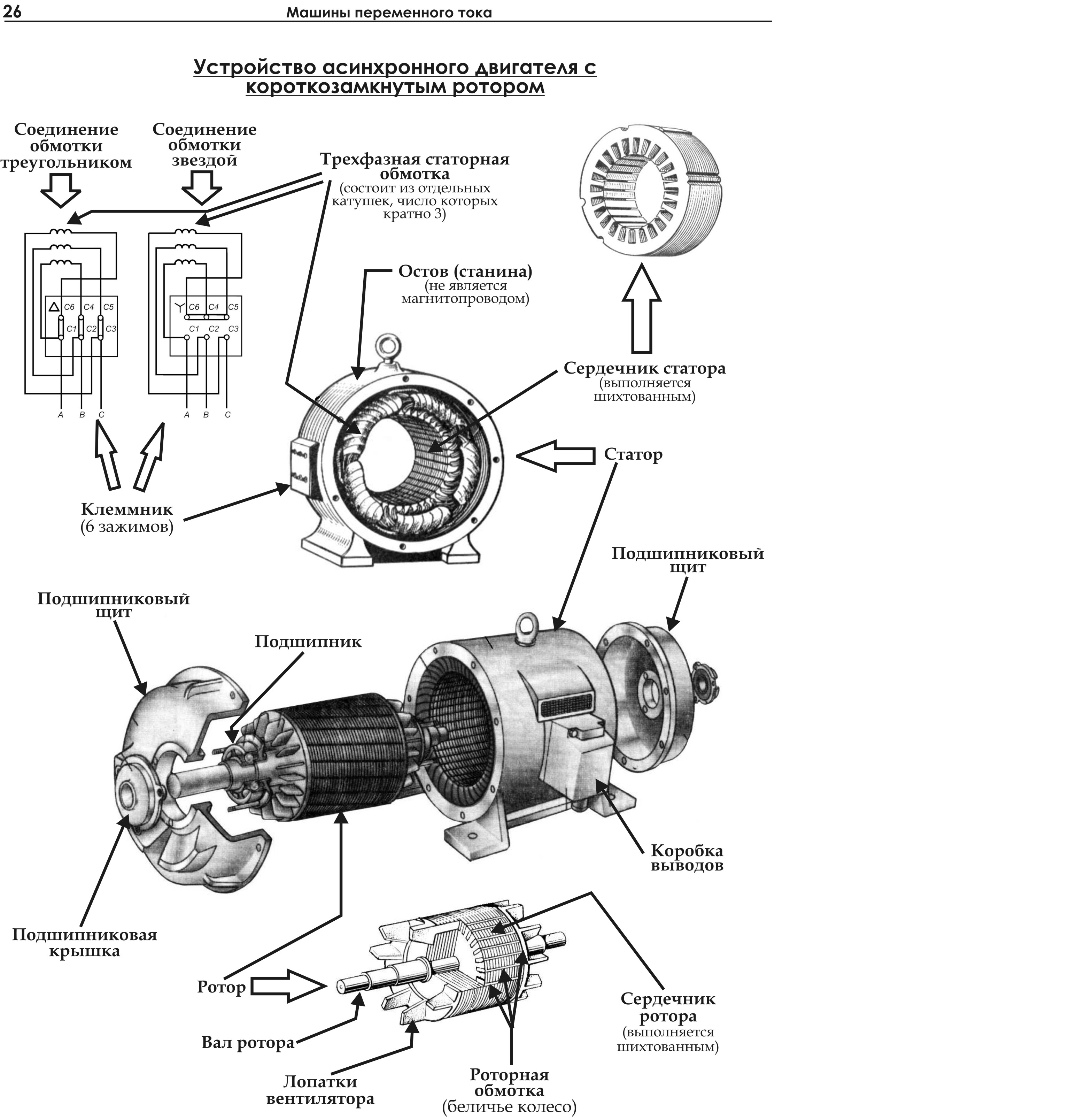 Чем больше габарит двигателя – тем меньше производителей на рынке.
Чем больше габарит двигателя – тем меньше производителей на рынке.
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |

3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Различные типы двигателей и их применение
При покупке двигателя часто спрашивают, какая технология лучше, переменного или постоянного тока, но дело в том, что это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного токаобладают высокой гибкостью по многим функциям, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока, некоторые из ключевых преимуществ:
- Низкое энергопотребление при запуске
- Контролируемое ускорение
- Регулируемая рабочая скорость
- Управляемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение нарушений в ЛЭП
Текущая тенденция для VSD заключается в добавлении дополнительных функций и функций программируемого логического управления (ПЛК), которые являются преимуществами для опытных пользователей, но требуют более высоких технических знаний во время обслуживания.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока от RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока, а скорость остается постоянной при переменных нагрузках, поэтому он идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы. , КИПиА
Щелкните здесь, чтобы увидеть пример синхронного двигателя из RS
Индукция (асинхронная)
Этот тип двигателя использует электромагнитную индукцию из магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента.Это наиболее распространенный тип двигателей переменного тока, который важен в промышленности из-за их нагрузочной способности. Однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовых приборах, тогда как трехфазные асинхронные двигатели чаще используются в промышленных приложениях, включая например, компрессоры, насосы, конвейерные системы и подъемные механизмы.
Нажмите здесь, чтобы увидеть пример асинхронного двигателя RS
Двигатели постоянного тока
Двигатели постоянного токабыли первым широко используемым типом двигателей, и начальные затраты на системы (двигатели и привод), как правило, ниже, чем на системы переменного тока для маломощных блоков, но с более высокой мощностью общие затраты на техническое обслуживание увеличиваются, и их необходимо учитывать рассмотрение.Скорость двигателей постоянного тока можно регулировать, изменяя напряжение питания, и они доступны в широком диапазоне напряжений, однако наиболее популярными являются типы 12 и 24 В, с некоторыми из преимуществ:
- Простая установка
- Регулировка скорости в широком диапазоне
- Быстрый запуск, остановка, реверсирование и ускорение
- Высокий пусковой крутящий момент
- Линейная кривая скорость-крутящий момент
Двигатели постоянного тока широко используются и могут применяться от небольших инструментов и бытовой техники до электромобилей, лифтов и подъемников
Щелкните здесь, чтобы увидеть пример двигателей постоянного тока от RS
Два общих типа:
Матовый
Это более традиционный тип двигателя, который обычно используется в приложениях, чувствительных к стоимости, где система управления относительно проста, например, в потребительских приложениях и более простом промышленном оборудовании, эти типы двигателей можно разбить на:
- Series Wound — Здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а регулирование скорости осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента двигателя скорость падает. .Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку имеет высокий пусковой крутящий момент.
- Шунтирующая обмотка — Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости за счет увеличения тока двигателя. Он имеет средний уровень пускового момента при постоянной скорости, поэтому подходит для таких областей применения, как токарные станки, пылесосы, конвейеры и шлифовальные машины.
- Составная обмотка — это совокупность последовательностей и шунтов, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям.Этот тип имеет высокий пусковой крутящий момент и плавно работает при незначительном изменении нагрузки и используется для привода компрессоров, центробежных насосов с регулируемым напором, роторных прессов, дисковых пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, где требуется точное управление и низкий крутящий момент, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы для интенсивных применений), и механически намного проще по конструкции (не имеют щеток).Контроллер мотора использует датчики Холла для определения положения роторов, и с их помощью контроллер может точно управлять мотором через ток в катушках ротора) для регулирования скорости. Преимущества этой технологии — долгий срок службы, небольшие затраты на обслуживание и высокая эффективность (85-90%), а недостатками — более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для регулирования скорости и положения с такими приложениями, как вентиляторы, насосы и компрессоры, где требуются надежность и прочность.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением с разомкнутым контуром, от принтеров до промышленных приложений, таких как высокоскоростное оборудование для захвата и установки.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет управлять скоростью, крутящим моментом и положением двигателя, а интеллектуальная электроника управляет всеми тремя, поэтому, если требуется больший крутящий момент для ускорения до определенной скорости, то подается больший ток, они известны как бесщеточные сервомоторы.
Пример щеточного и бесщеточного двигателей постоянного тока
В чем разница между двигателем переменного тока и двигателем постоянного тока?
Есть два типа электродвигателей: электродвигатели переменного тока и электродвигатели постоянного тока. Основное различие между двигателем переменного тока и двигателем постоянного тока заключается в том, что двигатель переменного тока питается от переменного тока, в то время как двигатель постоянного тока питается от постоянного тока. Чтобы подробнее узнать о сравнительной таблице двигателей переменного и постоянного тока, ниже приведена таблица разницы между двигателями переменного и постоянного тока.
Разница между двигателем переменного тока и двигателем постоянного тока в табличной форме
Двигатели переменного тока | Двигатели постоянного тока |
| Электродвигатели переменного тока питаются от переменного тока. | Двигатели постоянного токапитаются от постоянного тока. |
| В двигателях переменного тока преобразование тока не требуется. | В двигателях постоянного тока требуется преобразование тока подобно переменному току в постоянный. |
| Двигатели переменного тока используются там, где требуются характеристики мощности в течение продолжительных периодов времени. | Двигатели постоянного токаиспользуются там, где требуется внешнее регулирование скорости двигателя. |
| Двигатели переменного тока могут быть однофазными или трехфазными. | Все двигатели постоянного тока однофазные. |
| В двигателях переменного тока Якоря не вращаются, а магнитное поле постоянно вращается. | В двигателях постоянного тока якорь вращается, а магнитное поле вращается. |
| Ремонт двигателей постоянного тока стоит дорого. | Ремонт двигателей переменного тока не требует больших затрат. |
| Двигатель переменного тока не использует щеток. | В двигателе постоянного токаиспользуются щетки. |
| Двигатели переменного тока имеют более длительный срок службы. | Двигатели постоянного токане имеют длительного срока службы. |
| Скорость двигателей переменного тока просто регулируется изменением частоты тока. | Скорость двигателей постоянного тока регулируется путем изменения тока обмотки якоря. |
| Двигатели переменного тока требуют эффективного пускового оборудования, такого как конденсатор, чтобы начать работу. | Двигатели постоянного токане требуют внешней помощи для запуска. |
Сейчас!
Мы узнаем больше о двигателях переменного и постоянного тока.
Что такое двигатель переменного тока?
Статор электродвигателя переменного тока имеет катушки, на которые подается переменный ток и которые создают вращающееся магнитное поле.Ротор электродвигателя переменного тока вращается внутри катушек электродвигателя и прикреплен к выходному валу, который создает крутящий момент посредством вращающегося магнитного поля.
Как работает двигатель переменного тока?
Есть два типа двигателей переменного тока. Двигатели синхронные и асинхронные.
Синхронный двигатель состоит из ротора, который приводится в действие источником постоянного тока. Статор имеет трехфазную обмотку, от которой может подаваться питание. Теперь, когда подаются эти два источника питания, то есть при определенных напряжениях, протекает ток, и катушка внутри создает магнитные поля.Когда вращающееся поле переменного тока (хотя статор не вращается, трехфазное поле даст эффект вращения) и поле постоянного тока взаимодействуют, создается крутящий момент, который приводит к вращению.
Асинхронный или асинхронный двигатель различается только в одной детали. У него нет отдельного поля постоянного тока. Вместо этого ротор вращается под действием индуктивности или передачи магнитного потока. Ротор будет пытаться следовать трехфазному потоку в статоре и, следовательно, вращающемся. Этот мотор используется в вентиляторах.
Какие типы двигателей переменного тока?
Существует два основных типа двигателей переменного тока, в каждом из которых используется свой ротор.
- Двигатели синхронные
- Двигатели асинхронные или асинхронные
Синхронный двигатель может работать с прецизионной частотой питания, поскольку он не реагирует на индукцию. Магнитное поле синхронного двигателя создается током, протекающим через контактные кольца. Синхронные двигатели работают быстрее, чем асинхронные двигатели, потому что скорость уменьшается из-за скольжения асинхронного двигателя. Асинхронный двигатель использует магнитное поле на роторе асинхронного двигателя, которое создается индуцированным током.
Типы синхронных двигателей
- Синхронные двигатели гладкие
- Супер синхронные двигатели
Типы асинхронных двигателей
Сколько типов двигателей постоянного тока?
Есть два типа двигателей постоянного тока.
- Двигатели постоянного тока с щетками
- Бесщеточные двигатели постоянного тока
Типы щеточных двигателей постоянного тока
- Шунтирующая рана
- Многослойная рана
- Постоянный магнит Обмотка серии
Заключение:
Двигателипеременного тока и двигатели постоянного тока используют тот же принцип использования обмотки якоря и магнитного поля, за исключением двигателей постоянного тока.В двигателях переменного тока якорь не вращается, а магнитное поле постоянно вращается.
В некоторых приложениях двигатели постоянного тока заменяются объединением двигателя переменного тока с электронным регулятором скорости. Двигатели постоянного тока заменяются двигателем переменного тока и электронным регулятором скорости, поскольку это более экономичное и менее дорогое решение.
Двигатели постоянного токаимеют много движущихся частей, замену которых дорого, а ремонт электрических цепей постоянного тока обычно дороже, чем использование нового двигателя переменного тока с электронным контроллером.
Что касается технического обслуживания, в основном используются двигатели переменного тока, поскольку доступность источника переменного тока для двигателей постоянного тока является постоянной проблемой.
Связанные темы
Различные типы электродвигателей и их применение
Как мы знаем, электродвигатель играет жизненно важную роль во всех секторах промышленности, а также в широком диапазоне применений. На рынке доступно множество типов электродвигателей. Выбор этих двигателей может быть сделан в зависимости от режима работы, напряжения и применения.Каждый двигатель состоит из двух основных частей: обмотки возбуждения и обмотки якоря. Основная функция обмотки возбуждения — создание фиксированного магнитного поля, в то время как обмотка якоря выглядит как проводник, расположенный внутри магнитного поля. Из-за магнитного поля обмотка якоря использует энергию для создания крутящего момента, необходимого для вращения вала двигателя. В настоящее время классификация двигателей постоянного тока может быть сделана на основе соединений обмоток, что означает, как две катушки в двигателе связаны друг с другом.
Типы электродвигателей
Типы электродвигателей доступны в трех основных сегментах, таких как электродвигатели переменного тока, электродвигатели постоянного тока и электродвигатели специального назначения.
типов двигателей
Двигатели постоянного тока
Типы двигателей постоянного тока в основном включают в себя серийные, шунтирующие и комбинированные двигатели и двигатели постоянного тока с постоянным током.
двигатель постоянного тока1). Шунтирующий двигатель постоянного тока
Шунтирующий двигатель постоянного тока работает от постоянного тока, и обмотки этого электродвигателя, такие как обмотки якоря и обмотки возбуждения, соединены параллельно, что называется шунтом.Этот тип двигателя также называется двигателем постоянного тока с шунтовой обмоткой, а тип обмотки известен как шунтирующая обмотка. Пожалуйста, обратитесь к этой ссылке, чтобы узнать больше о работе двигателя постоянного тока с шунтом и его применениях
2). Двигатель с раздельным возбуждением
В двигателе с раздельным возбуждением соединение статора и ротора может быть выполнено с использованием другого источника питания. Так что двигателем можно управлять с шунта, а обмотку якоря можно усилить для создания магнитного потока.
3). Двигатель постоянного тока
В двигателе постоянного тока обмотки ротора соединены последовательно.Принцип работы этого электродвигателя во многом зависит от простого электромагнитного закона. Этот закон гласит, что всякий раз, когда магнитное поле может быть сформировано вокруг проводника, оно взаимодействует с внешним полем, создавая вращательное движение. Эти двигатели в основном используются в стартерах, которые используются в лифтах и автомобилях. Пожалуйста, обратитесь к этой ссылке, чтобы узнать больше о работе двигателя постоянного тока и его применениях
Пожалуйста, обратитесь к этой ссылке, чтобы узнать больше о ДВИГАТЕЛЕ постоянного тока — Основы, типы и применение
4).Двигатель PMDC
Термин PMDC означает «двигатель постоянного тока с постоянными магнитами». Это один из видов двигателей постоянного тока, в который может быть встроен постоянный магнит, чтобы создать магнитное поле, необходимое для работы электродвигателя. Пожалуйста, перейдите по этой ссылке, чтобы узнать больше о двигателе PMDC: конструкция, работа и применение
5). Составной двигатель постоянного тока
Как правило, составной двигатель постоянного тока представляет собой гибридный компонент последовательного и параллельного двигателей постоянного тока. В этом типе двигателя присутствуют оба поля, такие как последовательный и шунтирующий.В этом типе электродвигателя статор и ротор могут быть соединены друг с другом через соединение последовательных и шунтирующих обмоток. Последовательная обмотка может быть спроектирована с несколькими витками широких медных проводов, что дает небольшой путь сопротивления. Шунтирующая обмотка может быть спроектирована с несколькими обмотками из медного провода для получения полного i / p напряжения.
Двигатели переменного тока
Типы двигателей переменного тока в основном включают синхронные, асинхронные и асинхронные двигатели.
двигатель переменного тока1). Синхронный двигатель
Работа синхронного двигателя в основном зависит от трехфазного источника питания.Статор электродвигателя генерирует ток возбуждения, который вращается со стабильной скоростью в зависимости от частоты переменного тока. Так же как и ротор, от аналогичной скорости зависит ток статора. Между скоростью тока статора и ротора нет воздушного зазора. Когда уровень точности вращения высок, эти двигатели применимы в автоматизации, робототехнике и т. Д. Пожалуйста, перейдите по этой ссылке, чтобы узнать больше о типах синхронных двигателей и их применениях.
2). Асинхронный двигатель
Электродвигатель, работающий с асинхронной скоростью, известен как асинхронный двигатель, и альтернативное название этого двигателя — асинхронный двигатель.Асинхронный двигатель в основном использует электромагнитную индукцию для изменения энергии с электрической на механическую. В зависимости от конструкции ротора эти двигатели делятся на два типа: с короткозамкнутым ротором и с фазовой обмоткой. Пожалуйста, обратитесь к этой ссылке, чтобы узнать больше о типах и преимуществах асинхронных двигателей
Двигатели специального назначения
К двигателям специального назначения в основном относятся серводвигатель, шаговый двигатель, линейный асинхронный двигатель и т. Д.
Электродвигатель специального назначения1) . Шаговый двигатель
Шаговый двигатель может использоваться для обеспечения углового шага вращения в качестве альтернативы стабильному вращению.Мы знаем, что для любого ротора полный угол вращения составляет 180 градусов. Однако в шаговом двигателе полный угол поворота может быть разделен на множество шагов, например, 10 градусов X 18 шагов. Это означает, что за полный цикл оборота ротор совершит ступенчатое движение восемнадцать раз, каждый раз на 10 градусов. Шаговые двигатели применимы в плоттерах, производстве схем, инструментах управления технологическим процессом, генераторах обычного движения и т. Д. Пожалуйста, обратитесь к этой ссылке, чтобы узнать больше о типах шаговых двигателей и их применениях
2).Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока были впервые разработаны для достижения превосходных характеристик на меньшем пространстве, чем щеточные двигатели постоянного тока. Эти двигатели меньше по размеру по сравнению с моделями переменного тока. Контроллер встроен в электродвигатель, чтобы облегчить процесс за счет отсутствия коммутатора и контактного кольца. Пожалуйста, перейдите по этой ссылке, чтобы узнать больше о бесщеточном двигателе постоянного тока — преимущества, применение и управление
3). Гистерезисный двигатель
Гистерезисный двигатель работает исключительно уникально.Ротор этого двигателя может быть вызван гистерезисом и вихревыми токами для создания необходимой задачи. Работа двигателя может зависеть от конструкции, однофазное питание или трехфазное питание. Эти двигатели обеспечивают очень плавный процесс со стабильной скоростью, как и другие синхронные двигатели. Уровень шума этого двигателя довольно мал, по этой причине они применимы во многих сложных приложениях, где бы ни использовался звуконепроницаемый двигатель, например, в аудиоплеере, аудиомагнитофоне и т. Д.
4).Реактивный двигатель
В основном, реактивный двигатель — это однофазный синхронный двигатель, и эта конструкция двигателя аналогична асинхронному двигателю, например, клеточного типа. Ротор в двигателе похож на короткозамкнутый ротор, а статор двигателя включает в себя наборы обмоток, такие как вспомогательная и основная обмотка. Вспомогательная обмотка очень полезна при запуске двигателя. Поскольку они предлагают ровную работу со стабильной скоростью. Эти двигатели обычно используются в приложениях синхронизации, которые включают генераторы сигналов, регистраторы и т. Д.
5). Универсальный двигатель
Это особый тип двигателя, который работает от одного источника переменного тока или постоянного тока. Универсальные двигатели имеют последовательную намотку, при этом обмотки возбуждения и якоря соединены последовательно, что обеспечивает высокий пусковой момент. Эти двигатели в основном предназначены для работы на высоких оборотах свыше 3500 об / мин. Они используют источник переменного тока на низкой скорости и источник постоянного тока аналогичного напряжения. Пожалуйста, перейдите по этой ссылке, чтобы узнать больше об универсальном двигателе
Таким образом, речь идет о типах электродвигателей.В настоящее время существуют разные и гибкие. Мотор предназначен для управления движением, это лучший выбор. Двигатель должен поддерживать работу и общую работу системы. Вот вам вопрос, что такое моторы особого типа?
Машина постоянного тока — конструкция, работа, типы, уравнение ЭДС и приложения
Машины постоянного тока можно разделить на два типа, а именно: двигатели постоянного тока и генераторы постоянного тока . Большинство машин постоянного тока эквивалентны машинам переменного тока, потому что они включают в себя как переменные токи, так и переменные напряжения.Выход машины постоянного тока — это выход постоянного тока, потому что они преобразуют напряжение переменного тока в напряжение постоянного тока. Преобразование этого механизма известно как коммутатор, поэтому эти машины также называются коммутаторами. Машина постоянного тока чаще всего используется в качестве двигателя. Основные преимущества этой машины включают регулировку крутящего момента, а также легкую скорость. Применение машины постоянного тока ограничено поездами, мельницами и шахтами. Например, в вагонах метро, а также в троллейбусах могут использоваться двигатели постоянного тока.В прошлом в автомобилях были установлены динамо-машины постоянного тока для зарядки батарей.
Что такое машина постоянного тока?
Машина постоянного тока — это электромеханическое устройство для преобразования энергии. Принцип работы машины постоянного тока заключается в том, что электрический ток протекает через катушку в магнитном поле, а затем магнитная сила создает крутящий момент, который вращает двигатель постоянного тока. Машины постоянного тока подразделяются на два типа, такие как генератор постоянного тока и двигатель постоянного тока.
Машина постоянного тока
Основная функция генератора постоянного тока заключается в преобразовании механической энергии в электрическую энергию постоянного тока, тогда как двигатель постоянного тока преобразует мощность постоянного тока в механическую энергию.Электродвигатель переменного тока часто используется в промышленных приложениях для преобразования электрической энергии в механическую. Однако двигатель постоянного тока применим там, где необходимо хорошее регулирование скорости и широкий диапазон скоростей, например, в системах электрических транзакций.
Конструкция машины постоянного тока
Конструкция машины постоянного тока может быть выполнена с использованием некоторых основных частей, таких как ярмо, полюсный сердечник и полюсные наконечники, полюсная катушка и обмотка возбуждения, сердечник якоря, обмотка якоря или проводник, коммутатор, щетки и подшипники.Некоторые из частей машины постоянного тока обсуждаются ниже.
Конструкция машины постоянного токаЯрмо
Другое название ярма — рама. Основная функция ярма в машине заключается в обеспечении механической опоры для столбов и защите всей машины от влаги, пыли и т. Д. Материалы, используемые в ярме, изготовлены из чугуна, литой стали или прокатной стали.
Полюс и сердечник полюса
Полюс машины постоянного тока представляет собой электромагнит, а обмотка возбуждения намотана между полюсами.Когда обмотка возбуждения находится под напряжением, полюс дает магнитный поток. Материалы, используемые для этого, — литая сталь, чугун или сердечник полюса. Он может быть изготовлен из отожженных стальных пластин для уменьшения падения мощности из-за вихревых токов.
Башмак для шеста
Башмак для стойки в машине постоянного тока является обширной деталью, а также для увеличения области полюса. Из-за этой области поток может распространяться внутри воздушного зазора, а дополнительный поток может проходить через воздушное пространство к якорю.Материал, используемый для изготовления полюсного башмака, — это чугун, в противном случае — литой конь, а также использовалась отожженная стальная пластина для уменьшения потерь мощности из-за вихревых токов.
Обмотки возбуждения
В этом случае обмотки намотаны в области сердечника полюса и называются обмоткой возбуждения. Когда ток подается через обмотку возбуждения, он приводит в действие полюсы, которые создают необходимый магнитный поток. Материал обмоток возбуждения — медь.
Сердечник якоря
Сердечник якоря включает в себя огромное количество пазов внутри своего края.В этих пазах находится провод якоря. Он обеспечивает путь с низким сопротивлением к потоку, создаваемому обмоткой возбуждения. Материалы, используемые в этом сердечнике, представляют собой материалы с низкой магнитной проницаемостью, такие как литое железо. Ламинирование используется для уменьшения потерь из-за вихревых токов.
Обмотка якоря
Обмотка якоря может быть образована путем соединения между собой проводников якоря. Когда обмотка якоря поворачивается с помощью первичного двигателя, в ней индуцируется как напряжение, так и магнитный поток.Эта обмотка подключена к внешней цепи. Для этой обмотки используются проводящие материалы, например медь.
Коммутатор
Основная функция коммутатора в машине постоянного тока состоит в том, чтобы собирать ток с проводника якоря, а также подавать ток на нагрузку с помощью щеток. А также обеспечивает однонаправленный крутящий момент для двигателя постоянного тока. Коммутатор может быть построен с огромным количеством сегментов в форме ребра жестко вытянутой меди. Сегменты в коммутаторе защищены тонким слоем слюды.
Щетки
Щетки в машине постоянного тока собирают ток от коммутатора и подают его на внешнюю нагрузку. Щетки изнашиваются со временем, чтобы часто проверять. В щетках используются графит, в противном случае — углерод прямоугольной формы.
Типы машин постоянного тока
Возбуждение машины постоянного тока подразделяется на два типа, а именно раздельное возбуждение и самовозбуждение. В машинах постоянного тока с отдельным типом возбуждения катушки возбуждения активируются отдельным источником постоянного тока.В машинах постоянного тока с самовозбуждением ток через обмотку возбуждения подается вместе с машиной. Основные типы машин постоянного тока подразделяются на четыре типа, включая следующие.
- Машина постоянного тока с независимым возбуждением
- Шунтирующая машина.
- Станок для намотки / серии.
- Машина для комбинированной раны / составной машины.
Отдельно возбуждаемые
В машине постоянного тока с раздельным возбуждением для активации катушек возбуждения используется отдельный источник постоянного тока.
Шунтирующая обмотка
В машинах постоянного тока с шунтирующей обмоткой полевые катушки соединены параллельно через якорь . Поскольку шунтирующее поле получает полное напряжение o / p генератора, иначе — напряжение питания двигателя, оно обычно состоит из огромного количества витков тонкой проволоки с небольшим током возбуждения.
Серийная обмотка
В машинах постоянного тока с последовательной намоткой катушки возбуждения соединены последовательно через якорь. Поскольку последовательная обмотка возбуждения получает ток якоря, а также большой ток якоря, в связи с этим последовательная обмотка возбуждения включает в себя несколько витков проволоки с большим поперечным сечением.
Составная рана
Составная машина включает в себя как рядные, так и шунтирующие поля. Две обмотки подключены к каждому полюсу машины. Последовательная намотка машины включает несколько витков огромной площади поперечного сечения, а также шунтирующие обмотки включают несколько витков тонкой проволоки.
Подключение составной машины может быть выполнено двумя способами. Если шунтирующее поле соединено параллельно только якорем, тогда машину можно назвать «составной машиной с коротким шунтом», и если шунтирующее поле соединено параллельно как арматурой, так и последовательным полем, тогда машина называется «машина с длинным шунтом».
Уравнение ЭДС машины постоянного тока
Машина постоянного тока e.m.f можно определить как когда якорь в машине постоянного тока вращается, напряжение может генерироваться внутри катушек. В генераторе ЭДС вращения можно назвать генерируемой ЭДС, а Er = Eg. В двигателе ЭДС вращения можно назвать встречной или противоэдс, а Er = Eb.
Пусть Φ — полезный поток для каждого полюса в пределах паутины
P — общее количество полюсов
z — общее количество проводников внутри якоря
n — скорость вращения якоря при обороте за каждую секунду
А — это нет.параллельных полос по всей арматуре среди щеток противоположной полярности.
Z / A — это нет. проводов якоря последовательно для каждой параллельной дорожки
Поскольку магнитный поток для каждого полюса равен ‘Φ’, каждый проводник режет магнитный поток ‘PΦ’ за один оборот.
Напряжение, создаваемое для каждого проводника = наклон магнитного потока для каждого оборота в WB / Время, затраченное на один оборот в течение секунд
Поскольку ‘n’ оборотов завершаются за одну секунду, а 1 оборот будет выполнен за 1 / n секунду .Таким образом, время одного оборота якоря составляет 1 / нсек.
Стандартное значение производимого напряжения для каждого проводника
p Φ / 1 / n = np Φ вольт
Вырабатываемое напряжение (E) может быть определено с помощью количества проводников якоря в серии I любой отдельной полосы из щетки таким образом, все напряжение вырабатывается
E = стандартное напряжение для каждого проводника x нет. проводников в серии для каждой полосы
E = n.P.Φ x Z / A
Вышеприведенное уравнение — это e.м.ф. уравнение машины постоянного тока.
Машина постоянного тока против машины переменного тока
Разница между двигателем переменного тока и двигателем постоянного тока заключается в следующем.
Двигатель переменного тока | Двигатель постоянного тока |
| Двигатель переменного тока — это электрическое устройство, которое приводится в действие через двигатель переменного тока | Двигатель постоянного тока является одним из видов вращающихся двигателей, используемых для изменения энергии от постоянного тока до механического. |
| Они подразделяются на два типа, такие как синхронные и асинхронные двигатели. | Эти двигатели доступны в двух типах, например, щеточные двигатели. |
| Входное питание двигателя переменного тока — переменный ток | Входное питание двигателя постоянного тока — постоянный ток |
| В этом двигателе нет щеток и коммутаторов. | В этом моторе присутствуют угольные щетки и коллекторы. |
| Входные фазы питания двигателей переменного тока однофазные и трехфазные | Входные фазы питания двигателей постоянного тока однофазные |
| Характеристики якоря двигателей переменного тока заключаются в том, что якорь неактивен, а магнитное поле вращается. | Характеристики якоря двигателей постоянного тока: якорь вращается, а магнитное поле остается неактивным. |
| Он имеет три входных терминала, таких как RYB. | Он имеет две входные клеммы, такие как положительный и отрицательный. |
| Управление скоростью двигателя переменного тока может осуществляться путем изменения частоты. | Управление скоростью двигателя постоянного тока может быть выполнено путем изменения тока обмотки якоря. |
| Эффективность двигателя переменного тока ниже из-за потери индукционного тока и скольжения двигателя. | Эффективность двигателя постоянного тока высока, поскольку отсутствует индукционный ток, а также проскальзывание. |
| Не требует обслуживания | Требуется техническое обслуживание |
| Двигатели переменного тока используются везде, где высокая скорость, а также переменная крутящий момент, требуется. | Двигатели постоянного тока используются везде, где требуется регулируемая скорость, а также высокий крутящий момент. |
| На практике они используются в крупных отраслях промышленности | На практике они используются в приборах |
Потери в машине постоянного тока
Мы знаем, что основной функцией машины постоянного тока является преобразование механических энергия в электрическую энергию.При использовании этого метода преобразования вся входная мощность не может быть преобразована в выходную мощность из-за потерь мощности в различных формах. Тип потери может меняться от одного устройства к другому. Эти потери снизят эффективность устройства, а также увеличат температуру. Потери энергии в машинах постоянного тока можно разделить на электрические, в противном случае — потери в меди, потери в сердечнике или потери в железе, механические потери, потери в щетках и потери в результате рассеянной нагрузки.
Преимущества машины постоянного тока
Преимущества этой машины заключаются в следующем.
- Машины постоянного тока, такие как двигатели постоянного тока, имеют различные преимущества, такие как высокий пусковой крутящий момент, реверсирование, быстрый запуск и остановка, изменяемые скорости через входное напряжение.
- Они очень легко управляются, а также дешевле по сравнению с AC
- хороший
- Крутящий момент высокий
- Работа без швов
- Без гармоник
- Простая установка и обслуживание
Применение машины постоянного тока
В настоящее время производство электроэнергии может производиться в больших объемах в форме переменного тока (переменный ток).Следовательно, использование машин постоянного тока, таких как двигатели и генераторы, генераторы постоянного тока крайне ограничено, поскольку они используются в основном для обеспечения возбуждения генераторов переменного тока крошечного и среднего диапазона. В промышленности машины постоянного тока используются для различных процессов, таких как сварка, электролитические процессы и т. Д.
Обычно генерируется переменный ток, а затем он преобразуется в постоянный ток с помощью выпрямителей. Поэтому генератор постоянного тока подавляется с помощью источника переменного тока, который выпрямляется для использования в нескольких приложениях.Двигатели постоянного тока часто используются в качестве приводов с регулируемой скоростью и там, где происходят серьезные изменения крутящего момента.
Применение машины постоянного тока в качестве двигателя используется путем разделения на три типа, таких как последовательный, шунтирующий и составной, тогда как применение машины постоянного тока в качестве генератора подразделяется на генераторы с раздельным возбуждением, последовательные и шунтирующие генераторы.
Итак, речь идет о машинах постоянного тока. Из приведенной выше информации, наконец, мы можем сделать вывод, что машины постоянного тока — это генератор постоянного тока и двигатель постоянного тока.Генератор постоянного тока в основном используется для подачи источников постоянного тока на машину постоянного тока на электростанциях. В то время как двигатель постоянного тока приводит в движение некоторые устройства, такие как токарные станки, вентиляторы, центробежные насосы, печатные машины, электровозы, подъемники, краны, конвейеры, прокатные станы, авто-рикши, льдогенераторы и т. Д. Вот вопрос для вас, что такое коммутация в машина постоянного тока?
Что такое электродвигатель переменного тока? Определение и типы
Определение: Двигатель, преобразующий переменный ток в механическую энергию с помощью явления электромагнитной индукции, называется двигателем переменного тока.Этот двигатель приводится в действие переменным током. Статор и ротор — две наиболее важные части двигателей переменного тока. Статор — это неподвижная часть двигателя, а ротор — это вращающаяся часть двигателя. Двигатель переменного тока может быть однофазным или трехфазным.
Трехфазные двигатели переменного тока в основном используются в промышленности для преобразования большой мощности с электрической в механическую. Для преобразования малой мощности в основном используются однофазные двигатели переменного тока. Однофазные двигатели переменного тока почти небольшие по размеру и обеспечивают множество услуг в доме, офисе, на предприятиях, на заводах и т. Д.Почти все бытовые приборы, такие как холодильники, вентиляторы, стиральные машины, фены, миксеры и т. Д., Используют однофазный двигатель переменного тока.
Электродвигатели переменного тока в основном делятся на два типа. Это синхронный двигатель и асинхронный двигатель.
Синхронный двигатель
Двигатель, который преобразует электрическую мощность переменного тока в механическую энергию и работает только с синхронной скоростью, известен как синхронный двигатель.
Принцип работы синхронного двигателя
Когда питание подается на синхронный двигатель, создается вращающееся поле.Это поле пытается увлечь за собой ротор, но не может этого сделать из-за инерции ротора. Следовательно, пусковой крутящий момент не создается. Таким образом, синхронный двигатель по своей сути не запускается автоматически.
Асинхронный двигатель или асинхронный двигатель
Машина, которая преобразует электрическую энергию переменного тока в механическую энергию с помощью явления электромагнитной индукции, называемого асинхронным двигателем. Асинхронный двигатель в основном подразделяется на два типа: однофазный асинхронный двигатель и трехфазный асинхронный двигатель.
Принцип работы асинхронного двигателя
В индукционной машине обмотка якоря служит одновременно обмоткой якоря и обмоткой возбуждения. Когда обмотки статора подключены к питающему переменному току, в воздушном зазоре создается поток. Поток вращается с фиксированной скоростью, называемой синхронной скоростью. Этот вращающийся поток индуцирует напряжения в статоре и обмотке ротора. Если цепь ротора замкнута, ток течет через обмотку ротора и вступает в реакцию с вращающимся потоком, создавая крутящий момент.