
ВРУ 200А с АВР, 2 ввода, 2 секции распределения (6х125А, 8х63А, 6х16А)
Вводно-распределительное устройство ВРУ 200А c АВР (ВРУ-Б-(200+200)-03-12).
Шкаф ВРУ-Б-(200+200)-03-12 напольного исполнения, с коммерческим учетом электроэнергии на вводах. Предназначен для ввода и распределения питания силового оборудования 1-й категории электроприемников — перерыв в электроснабжении может повлечь за собой опасность для жизни людей, значительный ущерб предприятию, массовый брак продукции, расстройство сложного технологического процесса и т.д. Перерыв в питании допускается на время включения резервного источника питания.
Оба ввода являются рабочими, каждая секция распределения питается от своего ввода. При нарушении питания на одном из вводов, происходит автоматическое переключение на питание от исправного ввода.
Характеристики:
- Вводные аппараты – выключатели-разъединители Nh50 400А с видимым разрывом.
- Автоматический ввод резерва с контролем напряжения по двум вводам выполнен на базе двух моноблочных АВР 200А серии NZ7, соединенных по схеме крест на крест (2-в-2).

- Секции распределения выполнены на автоматических выключателях в литом корпусе NM1 и/или модульного типа NB1-63/DZ158. Максимальное количество отходящих автоматов 3Р на одну секцию — 20 шт:
- NXB-125C 3P 125A 10kA х-ка C — 6 шт.
- NXB-63C 3P 16A 6kA х-ка C — 6 шт.
- NXB-63C 3P 63A 6kA х-ка C — 8 шт.
- Габариты 2100х2400х600 мм.

Настройки АВР:
- Нижняя граница напряжения от 160В
- Верхняя граница напряжения до 290В
- Задержка времени перехода на резервный ввод от 0с до 180с. Предотвращает ложные срабатывания АВР при кратковременных просадках напряжения в сети.
Схема ВРУ-Б-(200+200)-03-12:
Преимущества работы с нами:
В короткий срок рассчитаем вам точную смету по проекту, объясним нюансы изготовления и предложим наиболее подходящие конструктивные решения.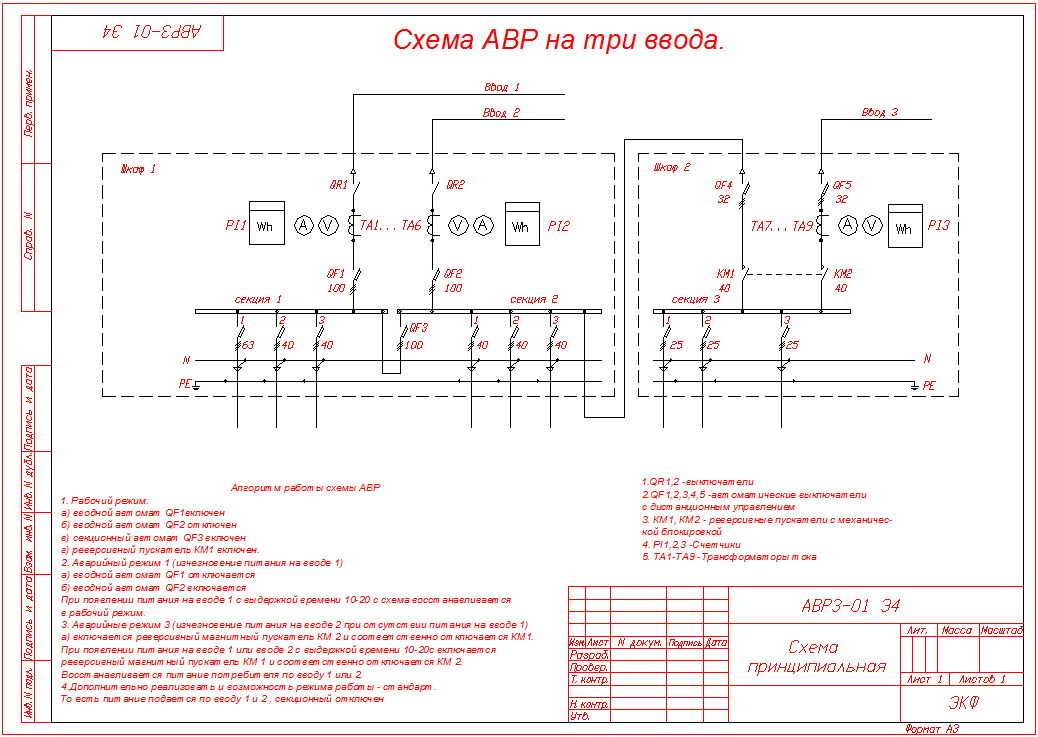 Поможем составить описательную часть проекта. Впоследствии изготовим конечному заказчику рассчитанные НКУ на нашем производственном предприятии в сжатые сроки. Действует программа стимулирования.
Поможем составить описательную часть проекта. Впоследствии изготовим конечному заказчику рассчитанные НКУ на нашем производственном предприятии в сжатые сроки. Действует программа стимулирования.
Поставим необходимые электромонтажные изделия, а также изготовим шкафы и щиты для энергоснабжения объекта точно в срок. Обеспечим отсутствие проблем с монтажом, подключением, сдачей в эксплуатацию и последующими проверками. Отлаженная логистика нашими силами и за наш счет.
Поставим продукцию в соответствии с требованиями службы эксплуатации точно в срок и по минимальной цене.
Обеспечим быстрое согласование заявки с вашим энергетиком.
С удовольствием участвуем во внутренних тендерах предприятий среди поставщиков для предложения наиболее правильного технического решения и оптимальной стоимости.
Отлаженная логистика нашими силами и за наш счет.
Изготовим для вас надежное изделие, которое полностью решит требуемую технологическую задачу, либо поставим необходимые комплектующие для самостоятельной сборки. Обеспечим отсутствие проблем с монтажом, подключением, сдачей в эксплуатацию и последующими проверками. Вы получите безаварийную и постоянную работу участка электроснабжения без простоев и потерь от недопроизводства.
Обеспечим отсутствие проблем с монтажом, подключением, сдачей в эксплуатацию и последующими проверками. Вы получите безаварийную и постоянную работу участка электроснабжения без простоев и потерь от недопроизводства.
Мы являемся официальным дистрибьютором CHINT в России, поэтому все комплектующие для сборки шкафов АВР мы получаем по оптовой цене без наценок посредников. Это позволяет нам предложить своим клиентам максимально выгодные условия.
Примеры наших проектов ВРУ:
Производственная площадка
Общая площадь производственных помещений 900 м²: сборочный цех, цех металлообработки, склад комплектующих и готовой продукции. На производстве заняты 56 мастеров и инженеров.
Кабельно-проводниковая продукция и медная шина для производства только ГОСТ.
Металлокорпуса для АВР мы изготавливаем самостоятельно из холоднокатаного листа производства НЛМК. Так мы приводим к единому стандарту все конструкции серийных распределительных шкафов из каталога.
Для производства напольных корпусов мы используем только оцинкованный металл толщиной 2 мм для большей стойкости к коррозии и жесткости каркаса. Для навесных шкафов используем холоднокатаный стальной лист толщиной 1,5 мм.
В цехе металлообработки стоит один координатно-револьверный пробивной пресс Abamet AMPe-750 и два гидравлических листогибочных пресса Abamet AMB-10031.
Сертифицированное качество
На все устройства ввода и распределения электроэнергии даём расширенную гарантию 2 года. Но реальный срок эксплуатации значительно больше — при правильном использовании изделие прослужит вам 25 лет.
У нас есть обязательный сертификат на продукцию собственного производства ТР ТС 004/2011 «О безопасности низковольтного оборудования» и сертификаты менеджмента качества ISO 9001:2005 / DAkkS DIN EN ISO 9001:2015. Поэтому мы так уверены в качестве своей продукции.
Остались вопросы? — Отправьте запрос на [email protected], позвоните по телефону, указанному на сайте или оформите заказ.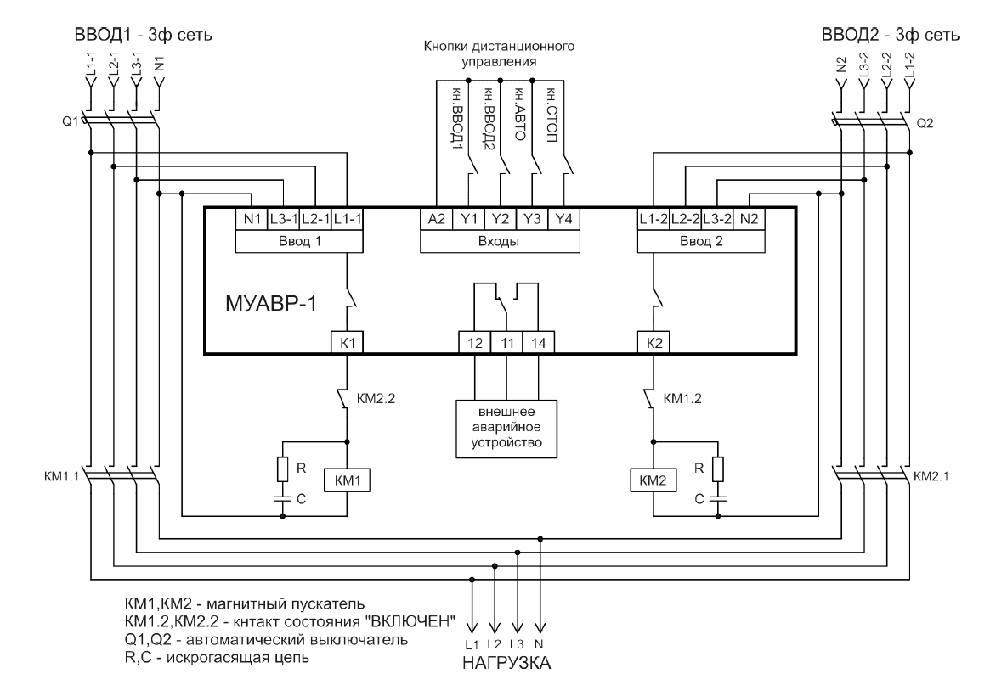 Наши менеджеры свяжутся с Вами в кратчайшие сроки и ответят на все интересующие Вас вопросы.
Наши менеджеры свяжутся с Вами в кратчайшие сроки и ответят на все интересующие Вас вопросы.
Возникли сложности с выбором распределительного устройства? — обращайтесь, и мы подберем нужный вариант, ответим на вопросы и сориентируем по ценам и срокам.
Характеристики
Артикул: ВРУ-Б-(200+200)-03-12
Производитель: BONPET
тип коммутации АВР: моноблок
исполнение: напольное
количество вводов: 2
комплектующие: CHINT Electric
степень защиты корпуса: IP31
номинальный ток: 200А
Схемы АВР на 2 ввода, 3 ввода с ДГУ (ДЭС)
АВР или автоматический ввод резерва предназначен для выполнения защитной функции в электросети. В случае нарушения электроснабжения на основном вводе питания АВР переключает потребителей на резервный ввод. Осуществляется это благодаря вводным и секционным аппаратам. За алгоритм работы отвечает релейная схема, либо программируемый контроллер.
Автоматический ввод резерва может быть реализован на разных схемах и используемом оборудовании. Некоторые из примеров рассмотрены далее.
Схемы предполагают ввод от двух источников питания.
Схема АВР №1 на 2 ввода выполнена на контакторах с механической блокировкой. В данном случае один из вводов основной, а второй – резервный, напряжение поступает на общую систему шин. Режима работы может быть 2:
- С приоритетом ввода;
- Без приоритета ввода;
Режим работы с приоритетом ввода. При наличии нормального напряжения на обоих вводах нагрузка подключается к приоритетному. В случае если напряжение основного ввода пропадёт – нагрузка переключается ко второму (резервному) вводу. Как только напряжение приоритетного ввода восстановлено – нагрузка переключается обратно на этот ввод.
Режим работы без приоритета ввода. АВР позволяет запитываться потребителям от любого из вводов. При исчезновении напряжения на рабочем вводе, нагрузка переключается на второй ввод.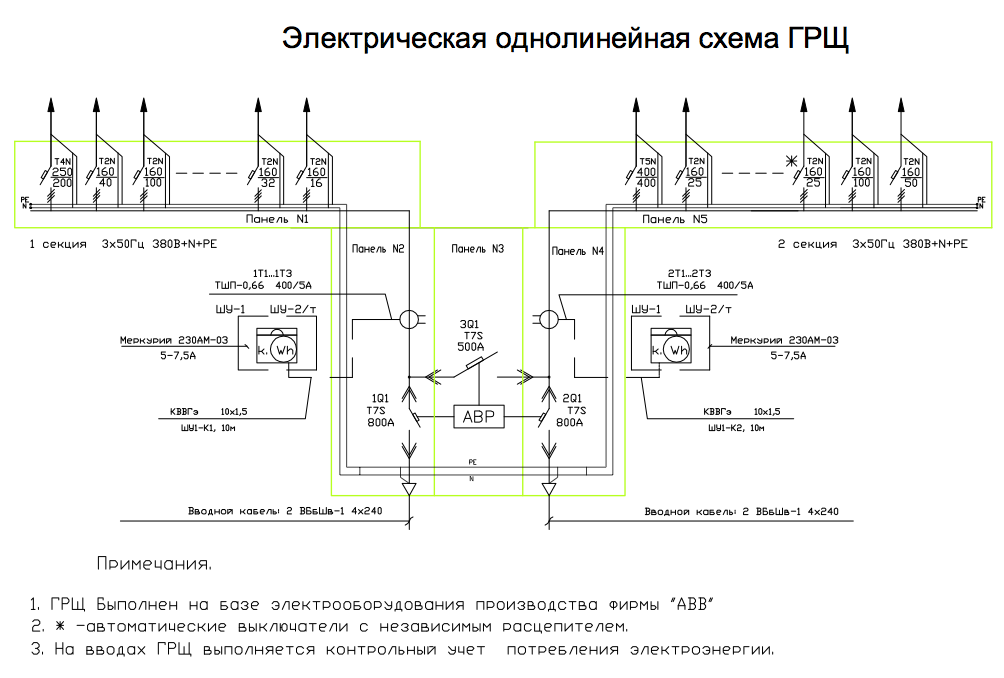
Данная схема АВР №2 аналогична предыдущей по принципу действия, тоже может иметь приоритет ввода. Переключение по схеме происходит уже не с помощью контакторов, а используются автоматы с моторным приводом (мотор-автоматы). Управляет моторами в данном случае ПЛК (контроллер), в котором задаются параметры работы.
Приведённая выше схема №3 имеет два ввода, секционный аппарат и две раздельные нагрузки. При этом секционный и вводные аппараты – выключатели с моторным приводом.
В случае нормального напряжения на обоих вводах – каждая из нагрузок запитывается от своего ввода. Как только на одном из вводов происходит авария – вводной автомат с мотором отключается и включается секционник, который позволяет питать от второго рабочего ввода отключенную нагрузку.
При восстановлении напряжения на вводе №1 секционный мотор-автомат отключается, и схема работает в нормальном режиме как и было изначально. То же самое происходит при исчезновении ввода №2.
То же самое происходит при исчезновении ввода №2.
На схеме №4 два ввода с секционированием на контакторах. Принцип работы как и на предыдущей схеме, за исключением силовых элементов, участвующих в переключении вводов. В данном случае это контакторы.
В схемах, где применяется секционирование, необходимо учитывать такой ток вводных аппаратов, который сможет обеспечить питание нагрузки №1 и нагрузки №2.
Схема №5 заключается в питании нагрузки №1 от ввода №1 и нагрузки №2 от ввода №2 в нормальном режиме. Коммутирующие элементы – автоматические выключатели с мотор-редукторами. На данной схеме, в отличие от предыдущей, каждая нагрузка питается от своего автомата, вне зависимости от ввода.
Один из недостатков схем на мотор-автоматах заключается в том, что при исчезновении напряжения на обоих вводах выключатели остаются в прежнем состоянии (если один из автоматов уже был разомкнут, то замкнутым останется только один из автоматов). То есть при возобновлении подачи напряжения в начальный момент питание сразу поступает на нагрузку без проверки реле контроля напряжения. Для таких случаев может применяться ИБП. Если используется ИБП, то автоматы защиты, как правило, подбираются с управлением 24В.
То есть при возобновлении подачи напряжения в начальный момент питание сразу поступает на нагрузку без проверки реле контроля напряжения. Для таких случаев может применяться ИБП. Если используется ИБП, то автоматы защиты, как правило, подбираются с управлением 24В.
Схема №6 на контакторах. 2 ввода на 2 нагрузки.
Схема №7 на 3 ввода (2 ввода + ДГУ)
Схема №7а на мотор-автоматах на 3 ввода.
Схема №8 – 2 ввода на 4 отходящие линии.
Схема №9 – релейная схема АВР на контакторах на 2 ввода.
Основы(обновлено): Использование акселерометра с микроконтроллером AVR
Некоторое время назад мы написали руководство по использованию акселерометра ADXL330 с микроконтроллером AVR. Прошло пару лет, и поэтому мы вернулись, чтобы обновить и подчистить некоторые недочеты в этом проекте.
Аналоговые устройства ADXL330, о которых мы первоначально писали (показано выше), были одним из первых недорогих прорывных устройств, которые впервые появились в контроллерах Wii и другой бытовой электронике с акселерометрами. В то время он стоил 11,50 долларов США за единицу, и мы смогли получить один, предварительно припаянный к плате, на Sparkfun.com за 35 долларов США.
В то время он стоил 11,50 долларов США за единицу, и мы смогли получить один, предварительно припаянный к плате, на Sparkfun.com за 35 долларов США.
За прошедшее время ADXL335 появился в качестве замены следующего поколения для ADXL330, который теперь несет на себе ужасное пятно «не рекомендуется для новых конструкций». (ADXL335 дешевле, чем 330 — в настоящее время 5,42 доллара за штуку по сравнению с 12,15 доллара за 330 — но в остальном они в основном эквивалентны.) также доступен предварительно припаянный к коммутационной плате. Мы используем плату от Adafruit (20 долларов), но аналогичные платы с совместимыми выводами также производятся Analog Devices (модель EVAL-ADXL335Z) и Digi-Key (модель DKSB1002A). (У Sparkfun также есть переходник ADXL335, но он совместим по выводам с их снятой с производства платой ADXL330, а не с этими другими.)
Помимо установки текущего чипа акселерометра, мы также немного подчистили проект с помощью одной из наших коммутационных плат ATmegaxx8. Не то чтобы в этой плате было скрыто какое-то волшебство — вы, конечно, все еще можете сделать этот проект на макетной плате, — но у нас презентация немного аккуратнее, а конечный продукт намного надежнее.
Не то чтобы в этой плате было скрыто какое-то волшебство — вы, конечно, все еще можете сделать этот проект на макетной плате, — но у нас презентация немного аккуратнее, а конечный продукт намного надежнее.
Начнем с самого начала. Мы используем ATmega168, популярный микроконтроллер AVR*, который мы будем питать напряжением 3 В от 2 элементов типа АА. (3 В — хороший выбор, чтобы сделать счастливыми и микросхему, и акселерометр.) На приведенной выше принципиальной схеме показаны основные соединения источника питания для AVR. Мы также используем источник питания 3 В в качестве опорного входа для аналого-цифрового преобразователя.
*Примечание 1. Другие AVR в том же семействе также будут работать, ATmega88, ‘168PA, ‘328P и т. д. Примечание 2. Если вы новичок в AVR, вы можете просмотреть наш список ресурсов для получения начал.
Следующее, что мы добавляем, это 6-контактный разъем ISP, который необходим для программирования микроконтроллера через стандартный интерфейс ISP, такой как USBtinyISP (тоже от Adafruit).
Принципиальная схема до сих пор — только с источником питания и подключениями к интернет-провайдеру — является общей для многих наших проектов, поэтому мы в первую очередь разработали эти платы ATmegaXX8.
Итак, вот коммутационная плата, AVR, 2 батарейных отсека AA и разъем. Три проволочных перемычки (как резисторы с одной черной полосой) используются для подключения контактов 20-22 к питанию/питанию/земле. Собрав это вместе, мы построили схему, показанную на последней принципиальной схеме.
Далее мы хотим добавить плату акселерометра.
На коммутационной плате ADXL335 имеется шесть контактов. Два для питания и земли, три аналоговых выхода для X, Y и Z, а также «тестовый» контакт, который мы можем оставить отключенным. Мы собираемся сначала подключить источник питания, а затем подключить линии X, Y и Z к аналоговым входам нашего микроконтроллера.
Сначала припаяйте 6-контактный разъем к коммутационной плате ADXL335.
Затем мы добавляем эту плату в макетную область на боковой стороне платы микроконтроллера. Места внутри каждого белого прямоугольника внутренне связаны (и не связаны ни с чем другим).
Здесь мы подключаем линии 3 В и заземления платы акселерометра. Земля поступает от клеммы «GND» в левом верхнем углу к одной из средних полос через синий провод, а затем через другой синий провод к крайнему левому контакту платы ADXL335, обозначенному как GND. Точно так же мы подключаем Vcc («положительный источник питания») к клемме 3V через пару красных проводов. (Из-за перспективы этой фотографии трудно увидеть, какой контакт платы ADXL335 куда идет — это легче увидеть на фотографии выше и справа.)
Теперь, когда мы подключили питание, мы можем подключить аналоговые линии X, Y и Z.
Для этого добавляем три провода. «X» соответствует «ADC5», «Y» соответствует «ADC4», а «Z» соответствует «ADC3». Сделав это, мы добрались до последней принципиальной схемы.
Далее мы добавим несколько выходных светодиодов, которыми AVR может управлять для индикации значений ускорения по мере их считывания.
Здесь мы добавляем два светодиода (один красный, один синий) для каждой из трех осей.
Большая идея заключается в том, что когда нет ускорения (скажем) в направлении оси X, оба светодиода оси X выключены. При обнаружении ускорения в одну сторону загорается красный светодиод (и тем ярче, чем выше ускорение) и загорается синим при ускорении в обратном направлении. (Естественно, две другие оси работают одинаково.)
Для этого мы используем выходы широтно-импульсной модуляции от трех таймеров (таймер 0, таймер 1 и таймер 2) на микроконтроллере. Каждый таймер имеет два выхода, называемые контактами A и B «сравнения выходов», которые подключаются к двум светодиодам. Шесть выходов называются OC0A, OC0B, OC1A, OC1B, OC2A и OC2B и подключаются к светодиодам, как показано на схеме. (На синих светодиодах резисторы не нужны, потому что прямое напряжение у них 3,6 В — мы не приблизимся к их номинальному току, ~25 мА, с нашим блоком питания 3 В. )
)
Наши новые детали: шесть светодиодов (три красных, три синих) и три резистора.
Сначала мы добавим светодиоды для оси X.
OC0A проходит через резистор на светодиод, на землю. OC0B идет прямо через этот желтый провод к синему светодиоду на землю.
Вы можете скачать программу прошивки (код C) для AVR здесь (11 kB .ZIP файл). Это очень простая программа AVR-GCC под лицензией GPL. Читается в трех аналогах
вводится последовательно, и загораются шесть светодиодов дисплея в зависимости от значений, которые он считывает.
После того, как вы запрограммировали AVR, он должен быть готов к работе и показывать вам выходные данные, зависящие от ускорения.
Пока у нас есть выходные светодиоды только для одной оси, но вы уже можете попробовать.
При встряхивании, даже быстром, можно увидеть светодиоды, реагирующие на движение по оси X.
Если вы не бешено раскачиваете доску, вы увидите просто стационарное отображаемое гравитационное ускорение. Вы можете назвать это датчиком наклона, и он может сказать вам, какая сторона находится вверху.
Вы можете назвать это датчиком наклона, и он может сказать вам, какая сторона находится вверху.
Если мы наклоним нашу доску влево или вправо, так что ось X теперь будет указывать немного вверх или вниз (слегка с гравитацией или немного против нее), вы увидите, что пара светодиодов оси X, показанная здесь, переключается с красного на синий. . (Какой путь X? Это написано на печатной плате, а также в техпаспорте на акселерометр.)
Наконец, мы добавляем индикаторные светодиоды Y и Z.
И вот завершенный проект. Пара светодиодов «Y» находится вверху справа и подключена к OC1A и OC1B. Пара светодиодов «Z» находится в левом нижнем углу, для нее требуется один более длинный провод от MOSI/OC2A к красному светодиоду для оси Z.
Теперь он чувствителен во всех трех направлениях и может рассказать вам, что он видит. Лежа на нашем (не особенно ровном) столе для фотосъемки, оси X и Y сообщают о почти нулевом ускорении. В X или Y нет большого наклона. Единственный яркий светодиод — синий для Z, потому что *существует* сильное вертикальное ускорение. Естественно, красный светодиод Z загорается, когда вы переворачиваете его вверх дном.
Естественно, красный светодиод Z загорается, когда вы переворачиваете его вверх дном.
Эта запись была размещена в Основы, Электроника, Проекты EMSL, Микроконтроллеры с меткой AVR. Добавьте постоянную ссылку в закладки.
adc — Цепь обнаружения плавающей сигнальной линии
спросил
Изменено 9 лет, 2 месяца назад
Просмотрено 2к раз
\$\начало группы\$
У меня есть несколько внешних входных датчиков на устройстве, которое я делаю, и они подключены к АЦП. Существует ли электрический (то есть немеханический) метод определения того, является ли вход АЦП плавающим/отключенным/трехсостоятельным или действительно подключен к источнику сигнала, без изменения входного сигнала? Сигнал следует считать аналоговым; не обязательно цифровой логический сигнал.
Цель состоит в том, чтобы установить, являются ли считываемые данные АЦП значимыми или нет, чтобы можно было отметить промежутки времени при отключении зонда.
- АЦП
- аналоговый
- сигнал
\$\конечная группа\$
2
\$\начало группы\$
Если АЦП является частью типичного микроконтроллера (например, MSP430, AVR в Arduino), вы, вероятно, найдете дополнительные подтягивающие и подтягивающие резисторы с высокими значениями (например, 50 кОм).
Если вы разрешите только подтяжку, прочитаете АЦП, включите только подтягивание, снова прочитаете АЦП, и эти два показания сильно различаются, вы можете обоснованно заключить, что сигнал плавает без какого-либо дополнительного оборудования.
[РЕДАКТИРОВАТЬ], предполагая, что АЦП отслеживает медленно изменяющееся напряжение. Если он отслеживает высокоамплитудный шум, одной пары показаний может быть недостаточно для принятия решения. Тем не менее, подтягивающие/подтягивающие резисторы должны подтягивать сигнал близко к соответствующей шине.
Тем не менее, подтягивающие/подтягивающие резисторы должны подтягивать сигнал близко к соответствующей шине.
\$\конечная группа\$
\$\начало группы\$
Обычно с «зондами» можно добавить подтягивающий или подтягивающий вход, который надежно поместит вход АЦП в то, что было бы неразумной территорией для рабочего соединения (и достаточно быстро). Например, датчик термопары может иметь подтяжку в несколько десятков или сотен нА до +3,3 В, а выход АЦП за пределы диапазона будет интерпретироваться как обрыв датчика. Обрыв компенсационной линии отведения на датчике сопротивления может привести к выходу сигнала за пределы допустимого диапазона.
Если это нецелесообразно, другой метод, который можно использовать, состоит в том, чтобы на короткое время подать что-то вроде известного тока на вход, временно нарушая показания, но позволяя проверить целостность.
Это зависит от конкретного случая, в зависимости от датчика, и, как правило, эти методы добавляют немного ошибок или имеют другие нежелательные побочные эффекты. Конечно, эти методы не всегда практичны, если вы идете прямо к типичному микроконтроллеру или другому небуферизованному входу АЦП и подразумевают какое-то преобразование сигнала, которое обеспечивает вход с высоким импедансом.
Конечно, эти методы не всегда практичны, если вы идете прямо к типичному микроконтроллеру или другому небуферизованному входу АЦП и подразумевают какое-то преобразование сигнала, которое обеспечивает вход с высоким импедансом.
\$\конечная группа\$
\$\начало группы\$
Мы используем аналоговые переключатели для кратковременного подключения подтягивающего и подтягивающего резисторов к сигнальным линиям, поступающим в наши измерительные системы. Обычно сканируются все входы, но мы резервируем место в «рамке» для сканирования одного дополнительного входа датчика с применением подтяжки вверх и вниз. Таким образом, если у нас есть 16 входов (обычно термопары), мы используем 17-й измерительный слот, чтобы быть одной из 16 термопар, повторно протестированных с подтягиванием/подтягиванием.
Таким образом, после 16 кадров данных мы получили все 16 входных данных 16 раз и проверим все 16 входных данных с подтягиванием/вытягиванием вниз хотя бы один раз.