
Как проверить микросхему ШИМ-контроллера TL494(ka7500)
Вчера дошли руки до практического изучения этого, самого распространенного до недавнего времени, (на сегодняшний момент технологии пошли дальше) ШИМ-контроллера. У меня скопилось около 30 неисправных блоков. Не знаю, что первичнее, я их коллекционировал, чтобы научиться их ремонтировать, или я мечтал научиться их ремонтировать, для того и коллекционировал=))) Игрушечный осциллограф miniDSO DS203 я покупал(уже несколько лет назад), в первую очередь, с целью практического исследования импульсных источников. Тогда я с ним поиграл, и забросил идею ремонта блоков питания. У меня не хватило опыта и морального духу, чтобы разобраться в устройстве микросхемы.До сих пор мне удавалось отремонтировать только блоки с незначительными поломками.
Описаний работы микросхемы в интернете хоть отбавляй, я и раньше читал, например, эту статью, но ничего с ходу не понял.
Управляющая микросхема TL494
А тут мне попалось видео как парень запросто взял и отремонтировал блок.
Ссылка на тот момент, где он проверяет исправность микросхемы ШИМ.
Правильный ремонт блока питания ATX (by TheMovieAll)
Вобщем я опять достал один из неисправных блоков, и начал повторять за ним.
На AT блоке эксперимент удался сразу, при подаче питания с внешнего источника, микросхема запустилась, и я мог наблюдать «правильные» осциллограммы на 5-ой, 8-ой, и 11-ой ножках микросхемы. С ATX болком сразу не получилось.
Помучавшись немго, попытавшись запустить ШИМ в нескольких ATX блоках, я подумал, что не может быть, чтобы у всех был неисправен именно ШИМ. Значит я делаю что-то не так. Только тогда возникла мысль о PS-on сигнале. Замкнул его на землю, и заработало! Тут хочется добавить, замыкание резистора на 4-ой ножке, не универсальный метод, зависит от конкретного рисунка платы блока, часто DTC соединен с Vref так, что их не разъединить не разрезав дорожку. Парню TheMovieAll повезло, он замкнув резистор не посадил на землю Vref. Лучше этот резистор вообще не трогать. Более корректная методика — по инструкции с известного сайта ROM.by, пункт 3. Хотя я и читал ее несколько лет назад, обилие информации не позволило мне осмыслить и понять. Ну, видимо, некоторые вещи должны осмысливаться годами=)))
ROM.by: Азбука молодого ремонтника БП. Прочти, потом задавай вопрос.
Цитата:
«Проверка микросхемы ШИМ TL494 и аналогичных (КА7500).
Про остальные ШИМ будет написано дополнительно.
1. Включаем блок в сеть. На 12 ноге должно быть порядка 12-30V.
2. Если нет — проверяйте дежурку. Если есть — проверяем напряжение на 14 ноге — должно быть +5В (+-5%).
3. Если нет — меняем микросхему. Если есть — проверяем поведение 4 ноги при замыкании PS-ON на землю. До замыкания должно быть порядка 3…5В, после — около 0.
4. Устанавливаем перемычку с 16 ноги (токовая защита) на землю (если не используется — уже сидит на земле). Таким образом временно отключаем защиту МС по току.
5. Замыкаем PS-ON на землю и наблюдаем импульсы на 8 и 11 ногах ШИМ и далее на базах ключевых транзисторов.
6. Если нет импульсов на 8 или 11 ногах или ШИМ греется – меняем микросхему. Желательно использовать микросхемы от известных производителей (Texas Instruments, Fairchild Semiconductor и т.д.).
7. Если картинка красивая – ШИМ и каскад раскачки можно считать живым.
8. Если нет импульсов на ключевых транзисторах — проверяем промежуточный каскад (раскачку) – обычно 2 штуки C945 с коллекторами на трансе раскачки, два 1N4148 и емкости 1…10мкф на 50В, диоды в их обвязке, сами ключевые транзисторы, пайку ног силового трансформатора и разделительного конденсатора.»
glooch.livejournal.com
Ремонт блока питания для светодиодной ленты

Используя светодиодное освещение, многие радуются лишь до тех пор, пока оно исправно работает. Поломка блока питания светодиодной ленты может не только огорчить, но и ударить немного по карману. Сегодня мы рассмотрим ремонт блока питания для светодиодной ленты, типичные его неисправности и методики их устранения.
Ремонт блока питания для светодиодной ленты
Зачастую все дешевые китайские блоки питания для светодиодных лент выглядят примерно так. Стоит ли браться за ремонт такого блока? Стоит однозначно!

Как правило, если плата блока питания целая, и не превратилась в кусок обуглившегося радио-хлама, то ремонту такой блок подлежит.
Схема, блок питания для светодиодной ленты
Схемы в таких блоках почти всегда одинаковые, для наглядности можно пользоваться схемой изображенной ниже. Типичная схема, которая используется в подобных блоках питания.
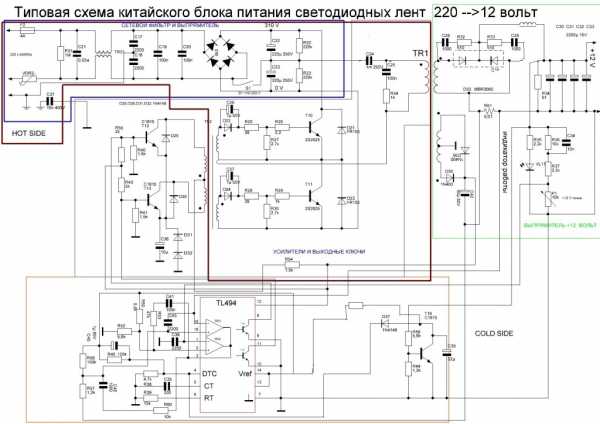
Основные неисправности в этих блоках питания:
- Микросхема ШИМ контроллер – TL494. Аналог: МВ3759, IR3M02, М1114ЕУ, KA7500 и т.д.
- Конденсаторы С22, С23 – высыхают, вздуваются и т.д.
- Ключевые транзисторы Т10, Т11.
- Сдвоенный диод D33 и конденсаторы С30-С33.
- Остальные элементы выходит из строя крайне редко, но тоже не стоит упускать их из вида.
Для начала вскрываем наш блок и осматриваем предохранитель. Если он целый, подаем питание и измеряем напряжение на конденсаторах С22, С23. Оно должно быть порядка 310 В. Если напряжение такое, значит сетевой фильтр и выпрямители исправны.
Следующим этапом станет проверка ШИМ. У нашего блока это микросхема КА7500.

– на 12 выводе должно быть около 12-30 В. Если нет, проверяем дежурку. Если есть – проверяем микросхему.

– на 14 выводе должно быть около +5 В.

Если нет, меняем микросхему. Если есть – проверяем микросхему осциллографом согласно схеме.
Как проверить TL494 без осциллографа?
Если нет осциллографа, рекомендуем взять заведомо рабочий блок питания, установить вместо микросхемы DIP панель, куда можно подключать проверяемые ШИМ контроллеры. Это единственный достоверный и вменяемый способ проверки TL494 без осциллографа.
Наша микросхема КА7500 после проверки, оказалась неисправной. Перед установкой нового ШИМ контроллера устанавливаем DIP панель.

На фото мы подготовили все для замены ШИМ.

Меняем ее на аналог TL494CN.

Следующим этапом станет небольшая модернизация блока. Если внимательно осмотреть сетевой фильтр есть место для установки варистора.
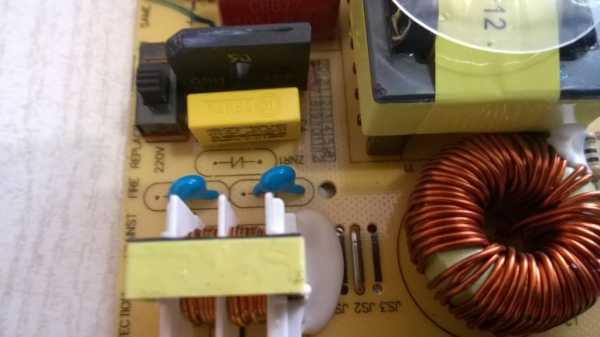
Устанавливаем варистор К275. Он будет защищать блок от скачков высокого напряжения. При коротком скачке – варистор поглощает энергию импульса, а при длительном – сопротивление варистора станет настолько малым, что сработает предохранитель и вся схема блока останется целой.

Блок перед финальным тестом.

После замены неисправных компонентов подключаем блок в сеть. Как видим блок прекрасно работает. Подстроечным резистором Р1 (возле зеленого светодиода) можно точно выставить выходное напряжение на блоке питание. Диапазон корректировки лежит в пределах от 11,65 В. до 13,25 В.

Как видим все работает исправно, ремонт блока питания для светодиодной ленты окончен. Учитывая, что в блоке отсутствует активная система охлаждения, рационально установить на крышку блока дополнительный кулер, закрытый сеткой в виде гриля.

Важно! При ремонте блока многие его компоненты находятся под опасным для жизни напряжением. Не стоит проводить манипуляции без достаточных знаний и навыков!
VK
Odnoklassniki
comments powered by HyperCommentsdiodnik.com
Проверка ШИМ конторллера tl494 CAVR.ru
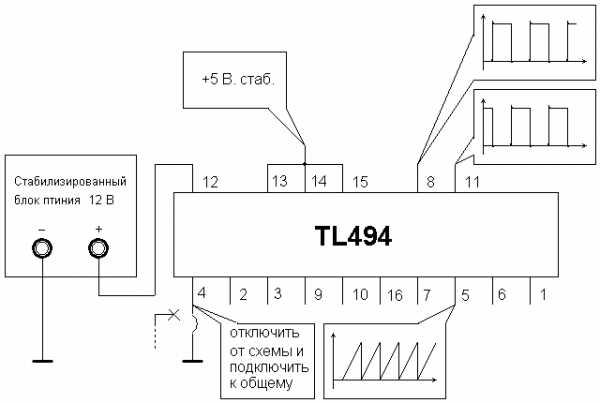
Рассказать в: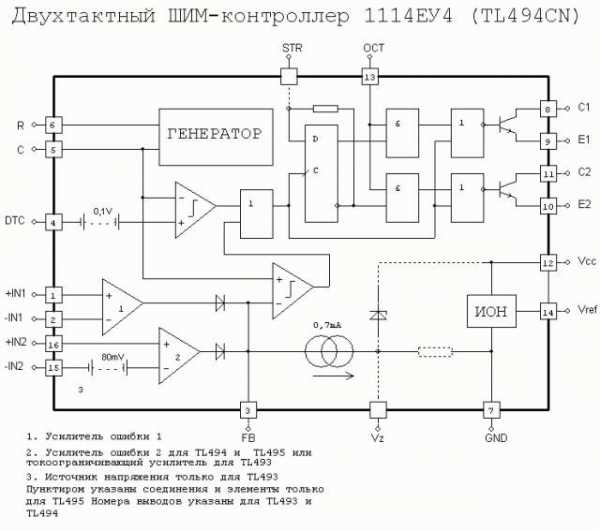 Есть несколько этапов проверки режимов работы ШИМ. Первый, не распевая обвязки контроллера просто падём питание на выводы 7 и 12 (напряжение питания) при этом на выводе 4 должно быть напряжение в пределах до 3,6 Вольт, на выводе 14,13 напряжение 5 Вольт (+/-0,2), Вывод 5 пилообразное напряжение, Выводы 8,11 чистое напряжение 2,3 Вольта. Все это нам говорит о работе ШИМ в ждущем режиме. Второй. Если при первом все хорошо, то необходимо закоротить вывод 4 на массу (Вывод 4 темная зона, используется как защита) и просмотреть форму импульсов на вывода 8 и 11. Импульсы должны быть чистыми и ровными.
Есть несколько этапов проверки режимов работы ШИМ. Первый, не распевая обвязки контроллера просто падём питание на выводы 7 и 12 (напряжение питания) при этом на выводе 4 должно быть напряжение в пределах до 3,6 Вольт, на выводе 14,13 напряжение 5 Вольт (+/-0,2), Вывод 5 пилообразное напряжение, Выводы 8,11 чистое напряжение 2,3 Вольта. Все это нам говорит о работе ШИМ в ждущем режиме. Второй. Если при первом все хорошо, то необходимо закоротить вывод 4 на массу (Вывод 4 темная зона, используется как защита) и просмотреть форму импульсов на вывода 8 и 11. Импульсы должны быть чистыми и ровными.  Идем далее. Если при первом способе все хорошо, а на втором есть отклонения по импульсу (шум в модуляции загнутые концы и т.д.) выводы 8,11 (или 9,10), то необходимо выпаять все элементы на выводах 8,11 и просмотреть снова форму сигнала, при отсутствии шума можно считать что ШИМ в рабочем состоянии. Смотрим обвязку по выводам 8,11
Идем далее. Если при первом способе все хорошо, а на втором есть отклонения по импульсу (шум в модуляции загнутые концы и т.д.) выводы 8,11 (или 9,10), то необходимо выпаять все элементы на выводах 8,11 и просмотреть снова форму сигнала, при отсутствии шума можно считать что ШИМ в рабочем состоянии. Смотрим обвязку по выводам 8,11Раздел: [Схемы]
Сохрани статью в:
Оставь свой комментарий или вопрос:
www.cavr.ru
Проверка работоспособности шим-контроллера.
Шим-контроллер считают «сердцем» источников питания, но
предварительно нужно проверить и другие компоненты блока питания выполнив
1) В выключенном состоянии источник внимательно осмотреть (особое внимание обратить на состояние всех электролитических конденсаторов — они не должны быть вздуты).
2) Проверить исправность предохранителя и элементов входного фильтра БП.
3) Прозвонить на короткое замыкание или обрыв диоды выпрямительного моста (эту операцию, как и многие другие, можно выполнить, не выпаивая диоды из платы). При этом в остальных случаях надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором (в подозрительных случаях, элемент схемы необходимо выпаивать и проверять отдельно).
4) Проверить исправность выходных цепей: электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов и диодных сборок.
5) Проверить силовые транзисторы высокочастотного преобразователя и транзисторов каскада управления. Обязательно проверить возвратные диоды, включенные параллельно электродам коллектор-эмиттер силовых транзисторов.
Эти действия, дают положительный результат в обнаружении только следствия неработоспособности всего блока, но причина неисправности в большинстве случаев находится гораздо глубже. Например, неисправность силовых транзисторов может быть следствием: неисправности цепей схемы защиты и контроля, нарушения цепи обратной связи, неисправности ШИМ-преобразователя, выхода из строя демпфирующих RC-цепочек или, межвитковый пробой в силовом трансформаторе. Поэтому, если удается найти неисправный элемент, то желательно пройти все этапы проверок, перечисленные выше (т. к. предохранитель сам по себе никогда не сгорает, а пробитый диод в выходном выпрямителе становится причиной «смерти» ещё и силовых транзисторов высокочастотного преобразователя).
В качестве шим-контроллера («сердца» источников питания) долгое время использовали микросхему TL494, а затем и ее аналоги (MB3759, KA7500B … KA3511, SG6105 и др.). Проверку работоспособности такой микросхемы, например, TL494 (рис. 1) можно произвести, не включая блок питания. При этом микросхему необходимо запитать от внешнего источника напряжением +9В..+20В. Напряжение подается на вывод 12 относительно выв. 7 — желательно через маломощный выпрямительный диод. Все измерения тоже должны проводиться относительно выв. 7. При подаче питания на микросхему контролируем напряжение на выв. 5. Оно должно быть +5В (±5%) и быть стабильным при изменении напряжения питания на выв. 12 В пределах +9В..+20В. В противном случае не исправен внутренний стабилизатор напряжения микросхемы. Далее осциллографом смотрим напряжение на выв. 5. Оно должно быть пилообразной формы амплитудой 3,2 В (рис. 2). Если сигнал отсутствует или иной формы, то проверить целостность конденсатора и резистора, подключенных к выв. 5 и выв. 6, соответственно. В случае исправности этих элементов микросхему необходимо заменить. После этого проверяем наличие управляющих сигналов на выходе микросхемы (выв. 8 и выв. 11). Они должны соответствовать осциллограммам, приведенным на рис. 2. Отсутствие этих сигналов так же говорит о неисправности микросхемы. В случае успешного прохождения испытаний микросхема считается исправной.
Рис. 1
Рис. 2
al-tm.ru
Регулируемый источник питания из БП ATX на TL494. Часть 1 — железо / Habr
Всем привет!Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.

Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
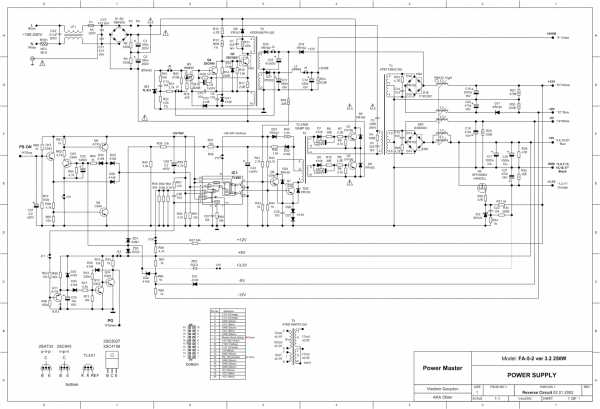
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
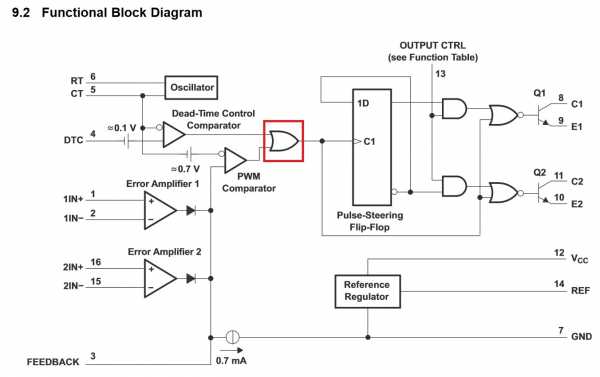
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:

Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:

Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
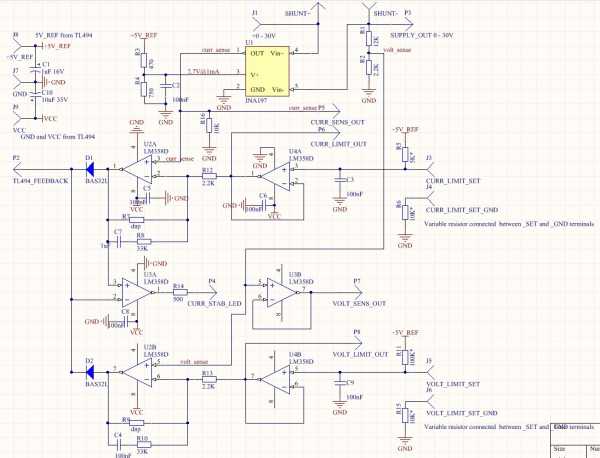
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.

Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
habr.com
Контроллер ШИМ импульсного блока питания TL494
Микросхема типа TL494CN, выпускаемая фирмой TEXAS INSTRUMENT (США), выпускается так же фирмой SHARP (Япония) под названием IR3M02, фирмой SAMSUNG (Корея) — КА7500, фирмой FUJITSU (Япония) — МВ3759, так же есть и отечественный аналог — КР1114ЕУ4.
Микросхема широко применяется в импульсных блоках питания, в частности, в блоках питания персональных компьютеров, а так же в DC/DC преобразователях.
На рисунке 1 показана цоколевка микросхемы.
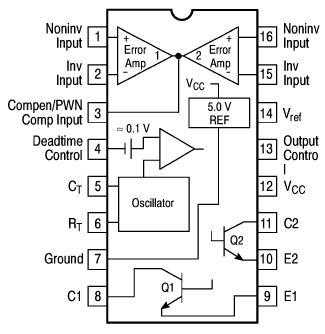
Рис. 1
Микросхема специально разработана для управления силовой частью ИБП и содержит в своем составе (рис.2):
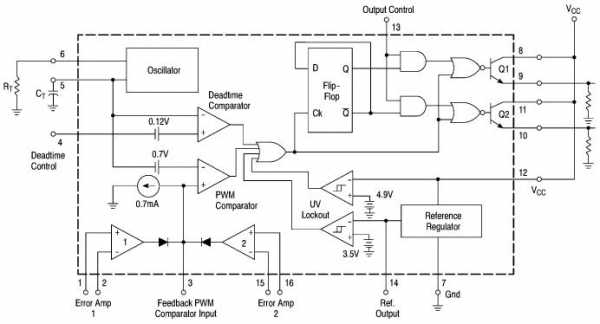
Рис. 2
- генератор пилообразного напряжения Oscillator; частота которого определяется номиналами резистора и конденсатора, подключенных к 5-му и 6-му выводам, и рассчитывается по формуле: F=1,1/RtCt
- источник опорного стабилизированного напряжения Reference Regulator (Uref=+5B) с внешним выходом на выводе 14;
- компаратор «мертвой зоны» Deadtime Comparator;
- компаратор ШИМ PWM Comparator;
- усилитель ошибки по напряжению 1;
- усилитель ошибки по сигналу ограничения тока 2;
- два выходных транзистора Q1 и Q2 с открытыми коллекторами и эмиттерами;
- динамический двухтактный D-триггер в режиме деления частоты на 2 — Flip-Flop;
- вспомогательные логические элементы;
- источник постоянного напряжения с номиналом 12V;
- источник постоянного тока с номиналом 0,7mA.
ИМС запускается в том случае если на 12-вывод поступает питающее напряжение в пределах от +7 до 40V. Выводы 1 и 2 — соответственно прямой и инвертирующий входы усилителя ошибки по сигналу обратной связи. Вывод 4 — вход регулировки «мертвой зоны» (это время, когда оба выходных транзистора микросхемы закрыты даже при максимальной потребляемой мощности). Выводы 5 и 6 служат для подключения внешних элементов внутреннего генератора пилообразного напряжения. Вывод 7 — общий, выводы 8 и 9 — коллектор и эмиттер первого транзистора, выводы 11 и 10 — коллектор и эмиттер второго транзистора. Вывод 13 — выбор режима работы (однотактный или двухтактный). Если на этом выводе положительное напряжение 2,4…5V двухтактный режим работы, транзисторы Q1 и Q2 открываются поочередно, выходные импульсы следуют друг относительно друга со сдвигом по фазе. Если на этом выводе напряжение составляет 0…0,4 V — однотактный режим, при этом транзисторы можно включать параллельно для увеличения выходного тока. Вывод 14 — выход опорного напряжения (+5 V) от встроенного стабилизированного источника опорного напряжения, выводы 16 и 15 — соответственно, прямой и инвертирующий входы усилителя ошибки по сигналу ограничения тока.
По функциональным узлам, входящим в состав микросхемы, ее можно разделить на аналоговую и цифровую составляющие.
К аналоговой составляющей относятся усилители ошибок, компараторы, генератор пилообразного напряжения и вспомогательные источники.
Все остальные элементы, в том числе и выходные транзисторы следует отнести к цифровой части.
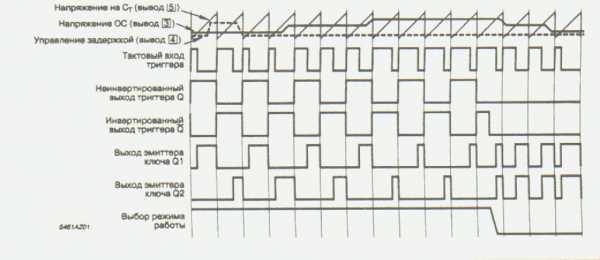
Из временных диаграмм приведенных на рис. 3 видно, что моменты появления выходных управляющих импульсов, а также их длительность определяется состоянием выхода логического элемента D1. Остальная логика выполняет лишь вспомогательную функцию, разделения выходных импульсов на два канала. Оба транзистора имеют открытые коллекторы и эмиттеры, поэтому их можно подключать двояко, как с общим эмиттером, так и с общим коллектором. Триггер Flip-Flop является двухтактным динамическим D-триггером. Принцип его работы в следующем. Каждый из выходных импульсов элемента D1 своим отрицательным фронтом переключает триггер и этим меняет канал прохождения следующего импульса, т. е . исключает появление двух отпирающих импульсов за один период работы.

Рис. 3
Типовая схема импульсного DC/DC преобразователя на основе TL494 показана на рисунке 4.
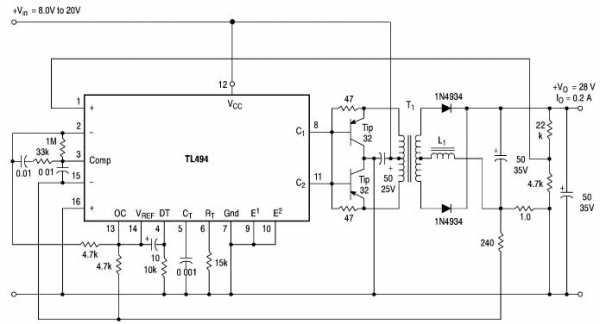
Рис. 4
Основные технические характеристики:
- Диапазон напряжения питания……… ..42V;
- Максимальное напряжение коллекторов выходных транзисторов………. 42V;
- Максимальный ток коллектора выходных транзисторов…….. 0,2А;
- Опорное напряжение…… 4,5…5,5V;
- Мощность рассевания в непрерывном режиме в корпусе DIP-16 при температуре окружающей среды ниже 45°С…….. 1W;
- Ток потребления не более…….. 10mA;
- Частота генератора может быть задана в пределах……… 1…200 kHz;
- Длительность фронта импульса выходного тока не более….. 200nS;
- Длительность спада импульса выходного тока не более……. 100nS;
- Сопротивление резистора RT может быть в пределах……. 1,8… 500 kOm;
- Емкость конденсатора СТ может быть в пределах…… 0,0047…10 мкФ;
- Рабочий диапазон температуры:
- TL494B…….. -40…+125°С;
- TL494C…….. 0…+70°С;
- TL494I ……… -40…+85°С.
Возможно, вам это будет интересно:
meandr.org
cxema.org — Мощный стабилизатор тока и напряжения на TL494
Мощный стабилизатор тока и напряжения на TL494
Этот стабилизатор обладает неплохими характеристиками, имеет плавную регулировку тока и напряжения, хорошую стабилизацию, без проблем терпит короткие замыкания, относительно простой и не требует больших финансовых затрат. Он обладает высоким кпд за счет импульсного принципа работы, выходной ток может доходить до 15 ампер, что позволит построить мощное зарядное устройство и блок питания с регулировкой тока и напряжения. При желании можно увеличить выходной ток до 20-и и более ампер.
В интернете подобных устройств, каждое имеет свои достоинства и недостатки, но принцип работы у них одинаковый. Предлагаемый вариант — это попытка создания простого и достаточно мощного стабилизатора.
За счет применения полевых ключей удалось значительно увеличить нагрузочную способность источника и снизить нагрев на силовых ключах. При выходном токе до 4-х ампер транзисторы и силовой диод можно не устанавливать на радиаторы.
Номиналы некоторых компонентов на схеме могут отличаться от номиналов на плате, т.к. плату разрабатывал для своих нужд.
Диапазон регулировки выходного напряжения от 2-х до 28 вольт, в моем случае максимальное напряжение 22 вольта, т.к. я использовал низковольтные ключи и поднять напряжение выше этого значения было рискованно, а так при входном напряжении около 30 Вольт, на выходе спокойно можно получить до 28-и Вольт. Диапазон регулировки выходного тока от 60mA до 15A Ампер, зависит от сопротивления датчика тока и силовых элементов схемы.
Устройство не боится коротких замыканий, просто сработает ограничение тока.
Собран источник на базе ШИМ контроллера TL494, выход микросхемы дополнен драйвером для управления силовыми ключами.
Хочу обратить ваше внимание на батарею конденсаторов установленных на выходе. Следует использовать конденсаторы с низким внутренним сопротивлением на 40-50 вольт, с суммарной емкостью от 3000 до 5000мкФ.
Нагрузочный резистор на выходе применен для быстрого разряда выходных конденсаторов, без него измерительный вольтметр на выходе будет работать с запаздыванием, т.к. при уменьшении выходного напряжения конденсаторам нужно время, для разрядки, а этот резистор быстро их разрядит. Сопротивление этого резистора нужно пересчитать, если на вход схемы подается напряжение больше 24-х вольт. Резистор двух ваттный, рассчитан с запасом по мощности, в ходе работы может греться, это нормально.
Как это работает:
ШИМ контроллер формирует управляющие импульсы для силовых ключей. При наличии управляющего импульса транзистор, и питание по открытому каналу транзистора через дроссель поступает на накопительный конденсатор. Не забываем, что дроссель является индуктивной нагрузкой, которым свойственно накапливание энергии и отдача за счет самоиндукции. Когда транзистор закрывается накопленный в дросселе заряд через диод шоттки продолжит подпитывать нагрузку. Диод в данном случае откроется, т.к. напряжение с дросселя имеет обратную полярность. Этот процесс будет повторяться десятки тысяч раз в секунду, в зависимости от рабочей частоты микросхемы ШИМ. По факту ШИМ контроллер всегда отслеживает напряжение на выходном конденсаторе.
Стабилизация выходного напряжения происходит следующим образом. На неинвертирующий вход первого усилителя ошибки микросхемы (вывод 1) поступает выходное напряжение стабилизатора, где оно сравнивается с опорным напряжением, которое присутствует на инверсном входе усилителя ошибки. При снижении выходного напряжения будет снижаться и напряжение на выводе 1, и если оно будет меньше опорного напряжения, ШИМ контроллер будет увеличивать длительности импульсов, следовательно транзисторы больше времени будут находиться в открытом состоянии и больше тока будет накачиваться в дроссель, если же выходное напряжение больше опорного, произойдет обратное — микросхема уменьшит длительность управляющих импульсов. Указанным делителем можно принудительно менять напряжение на неинвертирующщем входе усилителя ошибки, этим увеличивая или уменьшая выходное напряжение стабилизатора в целом. Для наиболее точной регулировки напряжения применён подстроечный многооборотный резистор, хотя можно использовать обычный.
Минимальное выходное напряжение составляет порядка 2 вольт, задается указанным делителем, при желании можно поиграться с сопротивлением резисторов для получения приемлемых для вас значений, не советуется снижать минимальное напряжение ниже 1 вольта.
Для отслеживания потребляемого нагрузкой тока установлен шунт. Для организации функции ограничения тока задействован второй усилитель ошибки в составе ШИМ контроллера тл494. Падение напряжения на шунте поступает на неинвертирующий вход второго усилителя ошибки, опять сравнивается с опорным, а дальше происходит точно тоже самое, что и в случае стабилизации напряжения. Указанным резистором можно регулировать выходной ток.
Токовый шунт изготовлен из двух параллельно соединённых низкоомных резисторов с сопротивлением 0,05Ом.
Накопительный дроссель намотан на желто белом кольце от фильтра групповой стабилизации компьютерного блока питания.
Так как схема планировалась на довольно большой входной ток, целесообразно использовать два сложенных вместе кольца. Обмотка дросселя содержит 20 витков намотанных двумя жилами провода диаметром 1,25мм в лаковой изоляции, индуктивность около 80-90 микрогенри.
Диод желательно использовать с барьером Шоттки и обратным напряжением 100-200 вольт, в моем случае применена мощная диодная сборка MBR4060 на 60 вольт 40 Ампер.
Силовые ключи вместе с диодом устанавливают на общий радиатор, притом изолировать подложки компонентов от радиатора не нужно, т.к. они общие.
Подробное описание и испытания блока можно посмотреть в видео
Печатная плата тут
- < Назад
- Вперёд >
vip-cxema.org