
✔ Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.
Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
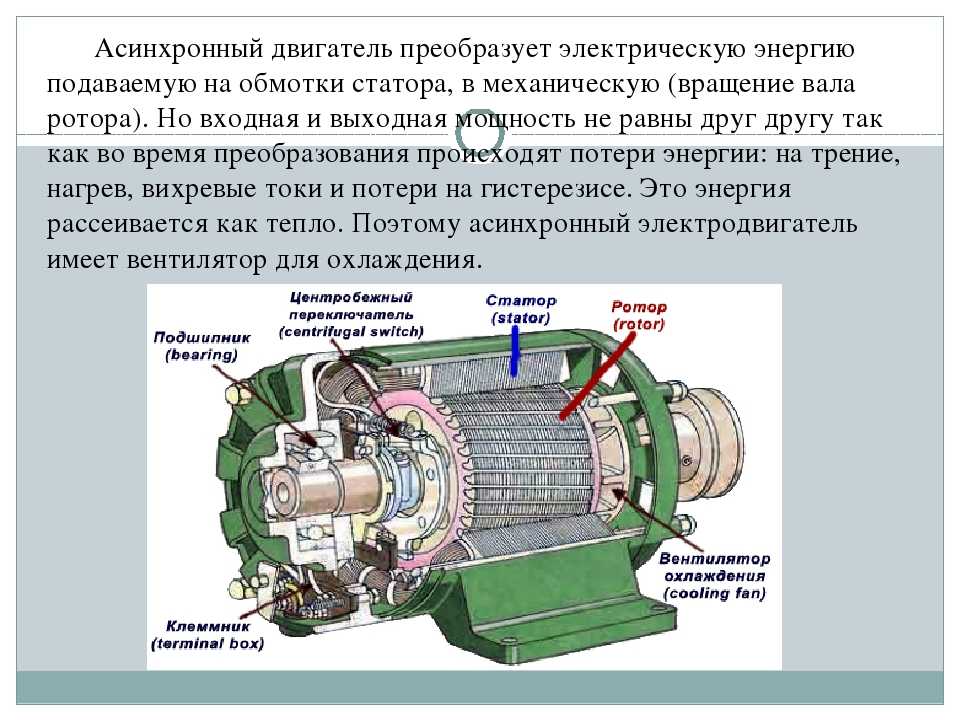
Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Перейти в каталог электродвигаетелей
Виды и типы электродвигателей | Публикации
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.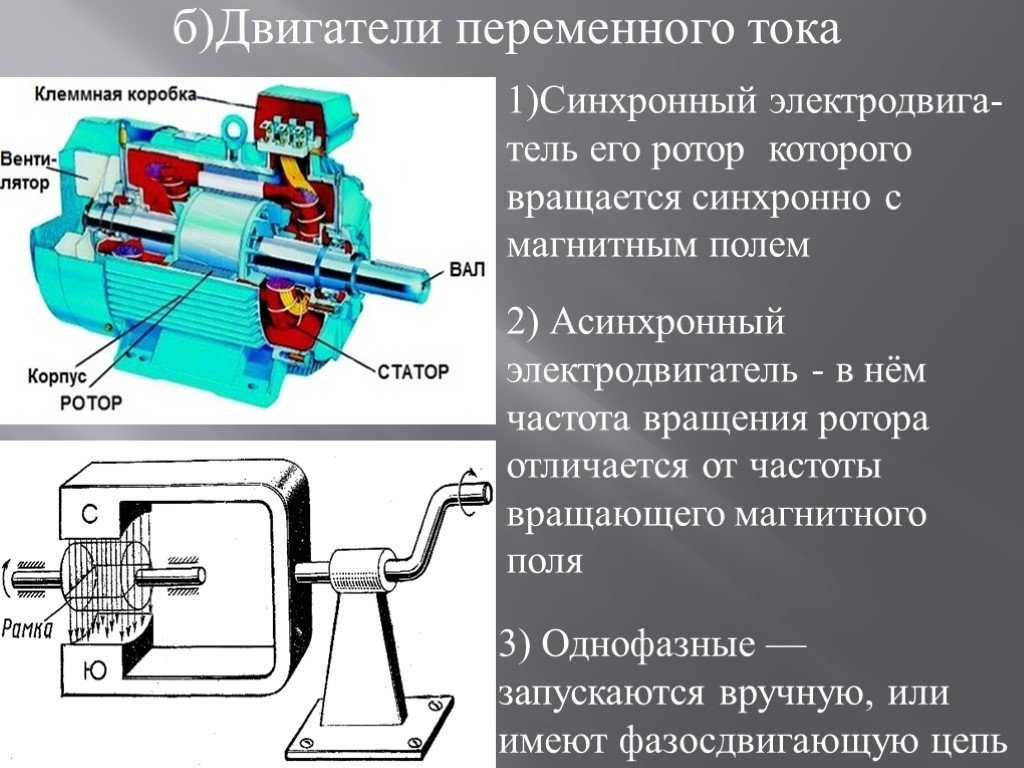
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.

- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.

- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.

- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.
- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.

- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.
- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.

- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
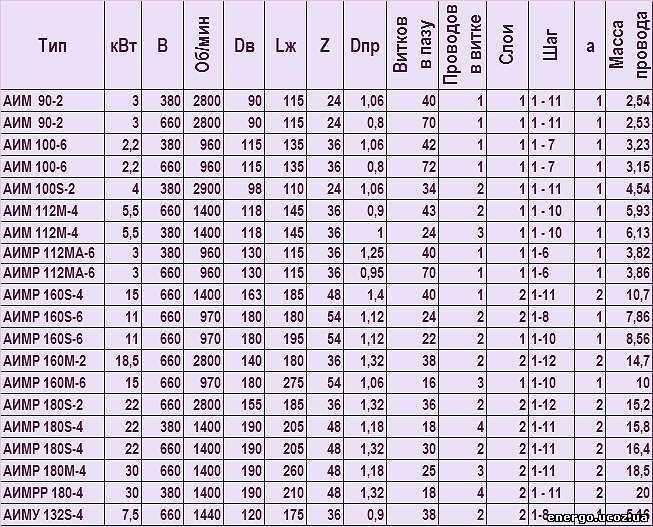
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный.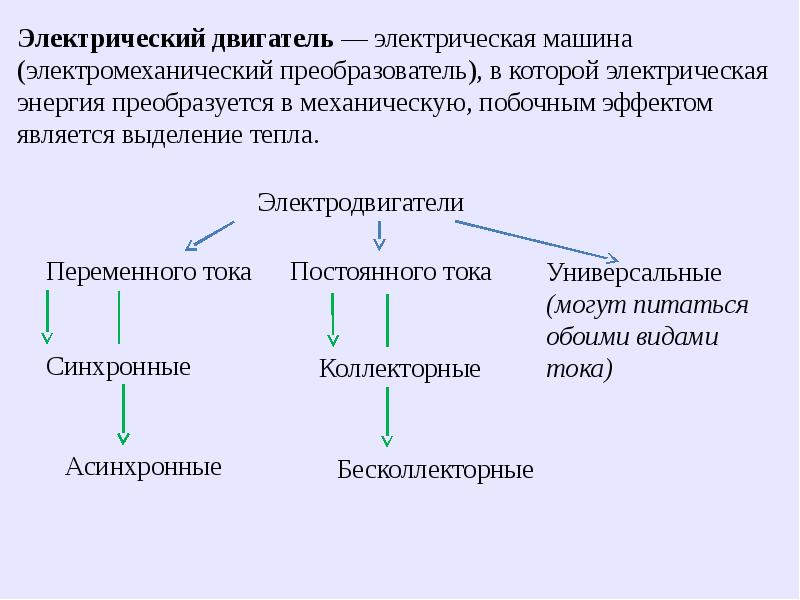 При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Что такое электродвигатель?
Электродвигатели представляют собой устройства, преобразующие электрическую энергию в механическую, обычно в форме вращательного движения. Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Электродвигатели не только обеспечивают простое и эффективное средство создания высокой выходной мощности привода, но и их легко уменьшить, что позволяет встраивать их в другие машины и оборудование. В результате они находят широкое применение как в промышленности, так и в повседневной жизни.
Принцип действия
Помнишь, тебя в школе учили правилу левой руки Флеминга? Электродвигатели являются применением этого правила, при этом сила, создаваемая электрическим током, протекающим через катушку в присутствии магнитного поля, заставляет вал двигателя вращаться.
На приведенной ниже диаграмме правило левой руки Флеминга говорит нам, что направленная вверх сила генерируется, когда ток течет перпендикулярно магнитному полю от магнита * .
*
Магнитное поле: Область, в которой присутствует магнитная сила (направленная от северного (N) к южному (S) полюсу магнита).

Как достигается вращение в электродвигателе
В случае щеточного электродвигателя постоянного тока *1 , например, эту силу можно использовать для поддержания непрерывного вращения путем изменения направления тока на каждом полуобороте катушки (что достигается с помощью щеток и коммутатора
*1
Двигатель постоянного тока: Двигатель, работающий от постоянного тока (DC)
*2
Щетки и коллектор: При совместном использовании они меняют направление тока каждый раз, когда вал двигателя делает пол-оборота.
История электродвигателей
Британский ученый Майкл Фарадей пользуется особым влиянием среди многих ученых 19 века, сыгравших определенную роль в изобретении и разработке электродвигателей. В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током.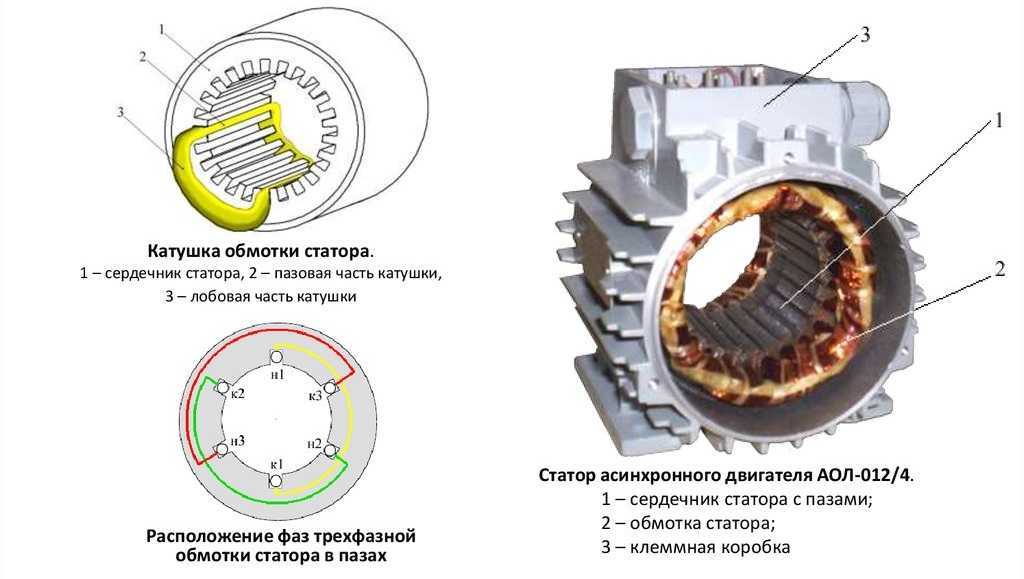 В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
Со временем было изобретено множество других типов электродвигателей, а также конструкции, которые можно считать архетипическими двигателями постоянного тока.
Впоследствии, в 1872 году, практический электродвигатель был не столько изобретен, сколько открыт, когда один из генераторов, выставленных на Всемирной выставке в Вене, начал вращаться сам по себе после того, как был случайно подключен к другому генератору. Это привело людей к пониманию того, что то, как работают генераторы, можно использовать и в двигателях. Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.
Двигатели и генераторы
В то время как электродвигатели преобразуют электрическую энергию во вращение и другие виды механической энергии, генераторы выполняют обратную функцию преобразования механической энергии в электрическую.
Несмотря на эти противоположные функции, двигатели и генераторы очень похожи по конструкции и принципу действия. Фактически, простой эксперимент, в котором два модельных двигателя соединяются вместе, — это все, что нужно, чтобы продемонстрировать, что электрический двигатель может также работать как генератор.
Типы электродвигателей
Электродвигатели бывают самых разных форм в зависимости от типа используемого тока, конструкции их катушек (обмоток) и того, как они генерируют магнитное поле. Соответственно, их можно классифицировать по различным признакам.
Ниже описаны три типа электродвигателей, обычно используемых как в быту, так и в промышленности.
Двигатели постоянного тока
Это двигатели, приводимые в действие источником постоянного тока. Они подразделяются на щеточные и бесщеточные (BLDC) двигатели в зависимости от того, используют ли они щетки *1 .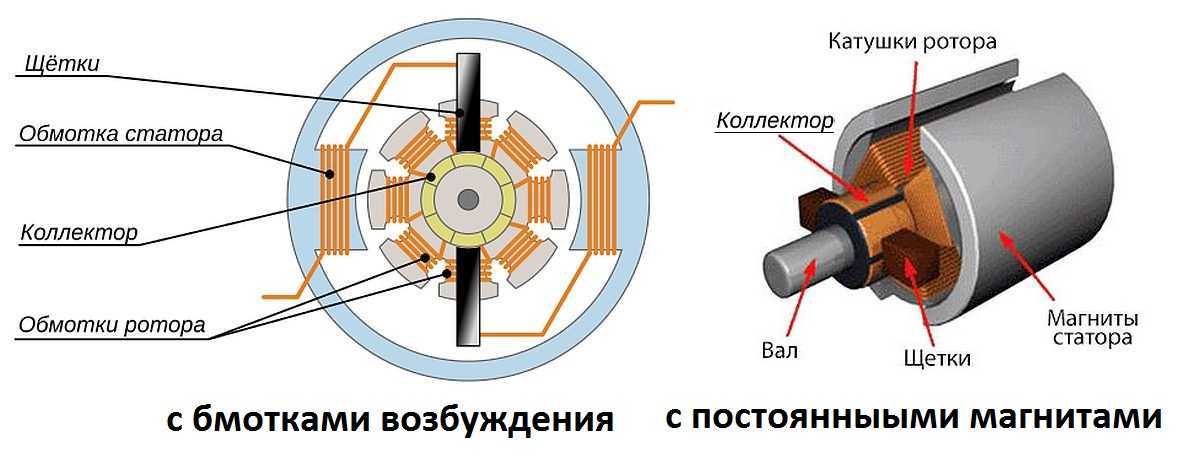
В то время как коллекторным двигателям постоянного тока для работы требуется только подключение к источнику питания постоянного тока, бесщеточным двигателям постоянного тока требуется датчик для определения ориентации магнитных полюсов ротора *2 и схема привода для подачи соответствующего тока.
*1
Щетка: Деталь, используемая вместе с коллектором.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
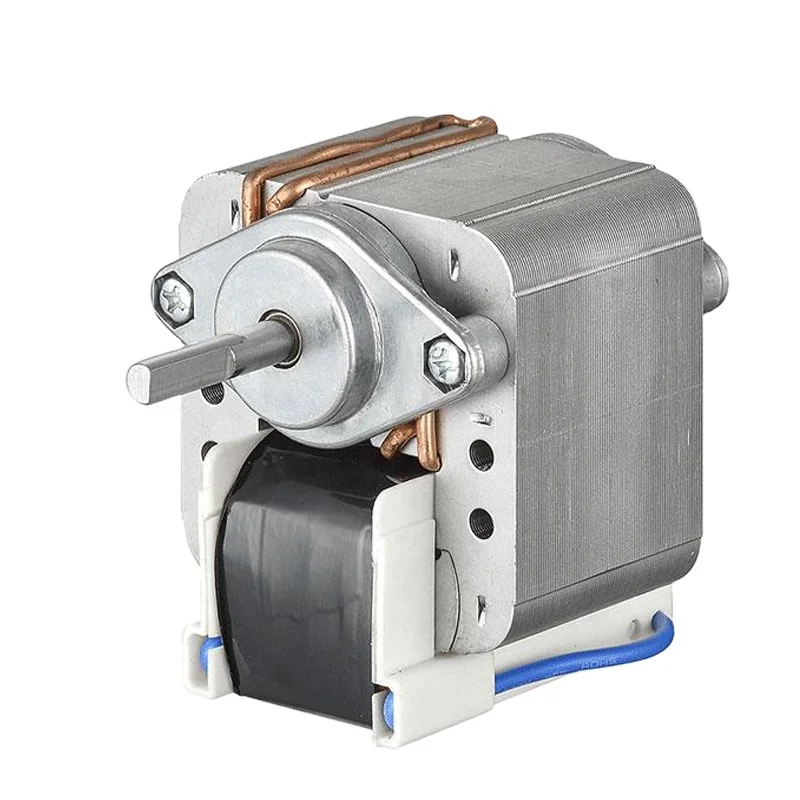
Двигатели переменного тока
Это двигатели, приводимые в действие источником переменного тока. Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 .
Однофазные двигатели далее сгруппированы в конденсаторные двигатели, в которых используется конденсатор *3 для создания крутящего момента, и двигатели с расщепленными полюсами, которые имеют дополнительную катушку (обмотку), называемую экранирующей катушкой 
*1
Однофазный: Обычный источник питания переменного тока, обычно доступный в домах.
*2
Трехфазный: тип источника питания переменного тока, используемый в основном в промышленности.
*3
Конденсатор: электронный компонент, хранящий электрическую энергию.
*4
Затеняющая катушка: катушка с замкнутой цепью, намотанная вокруг части сердечника статора.
Шаговые двигатели
Это двигатели, которые вращаются на фиксированный шаг (угол) каждый раз, когда вводится импульс *1 .
Шаговые двигатели можно сгруппировать по структуре их ротора. Двигатели с постоянными магнитами (PM) *2 имеют магнит в роторе *3 , двигатели с переменным сопротивлением (VR) *4 имеют железный сердечник, а гибридные двигатели имеют и то, и другое.
*1
Импульс: Короткий всплеск электричества, производимый включением и выключением источника питания.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
*3
Двигатель с постоянными магнитами: Двигатель с постоянным магнитом
.*4
ДвигательVR: двигатель с переменным магнитным сопротивлением, в котором сердечники расположены подобно зубьям шестерни, при этом такое расположение определяет угол шага.
Обзор типов электродвигателей
В таблице ниже перечислены основные характеристики трех различных типов двигателей.
В дополнение к перечисленным выше существует множество других типов электродвигателей.
| Тип | Характеристики |
|---|---|
| Линейный двигатель | Двигатель, скользящий в линейном направлении |
| Ультразвуковой двигатель | Двигатель, приводимый в движение ультразвуковыми колебаниями |
| Двигатель без сердечника | Коллекторный двигатель постоянного тока с ротором без железного сердечника или бесщеточный двигатель со статором без железного сердечника |
| Универсальный двигатель | Двигатель с фазным ротором и фазным статором, работающий как на переменном, так и на постоянном токе |
| Гистерезис двигателя | Двигатель переменного тока, в роторе которого используется материал, обладающий гистерезисом и вращающийся за счет гистерезисного крутящего момента |
| Двигатель SR | Шаговый двигатель VR, который также имеет функцию определения положения ротора, что позволяет избежать потери синхронизации |
Применение двигателей
Хотя электродвигатели используются по-разному, ниже перечислены общие области применения бесщеточных двигателей постоянного тока и шаговых двигателей, поставляемых ASPINA.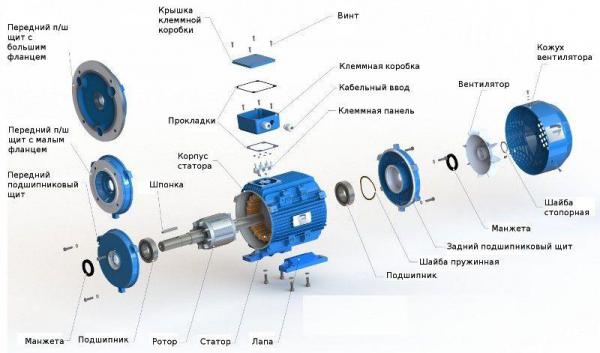
Области применения бесщеточных двигателей постоянного тока
Благодаря небольшим размерам, высокой мощности, низкому уровню шума и вибрации, а также длительному сроку службы бесщеточные двигатели постоянного тока находят широкое применение в таких приложениях, как системы вентиляции (очистители воздуха и другие виды кондиционер), бытовая техника, холодильники, водонагреватели, торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, контрольно-измерительные приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Финансовые терминалы (банкоматы), разменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Бытовая техника
- Чистые помещения
- Водонагреватели и горелки
- Оптические изделия
- Торговые автоматы
- Принтеры
- Морозильные и холодильные витрины
- Копировальные аппараты
- Медицинское оборудование
- Офисное оборудование
- Системы лабораторного анализа
Области применения шаговых двигателей
Превосходная точность остановки, высокий крутящий момент на средних и низких скоростях и превосходная чувствительность шаговых двигателей означают, что они могут использоваться в самых разных приводных устройствах, требующих точного управления.
- Производственное оборудование
- Приводы оптических дисков (приводы Blu-ray, DVD и т. д.)
- Медицинское оборудование
- Лазерные принтеры
- Лабораторные аналитические приборы
- Цифровые камеры
- Банкоматы
- Жалюзи кондиционера
- Торговые автоматы
- Развлекательные автоматы
- Автоматы по продаже билетов
- Копировальные аппараты
- Роботы
Решение проблем с электродвигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.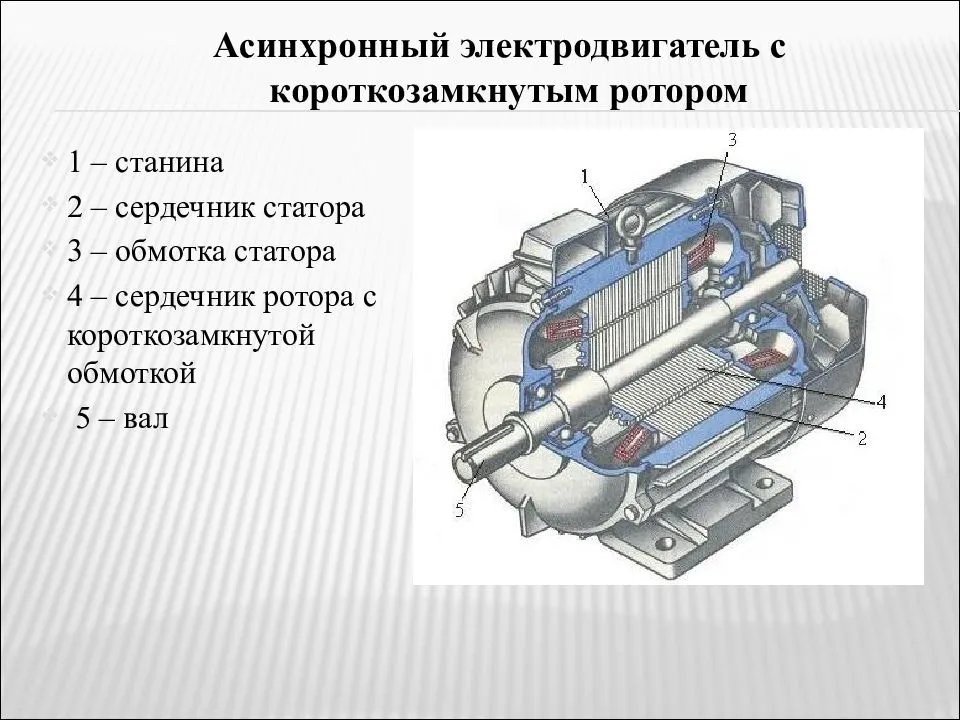
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.
Вы боретесь со следующими проблемами?
Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей на стороне?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
Уникальное требование
- Нужен специальный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, который дает вам требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Смотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Связанные темы:
- синхронный двигатель линейный двигатель реактивный двигатель вращательный двигатель Индукционный двигатель
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением.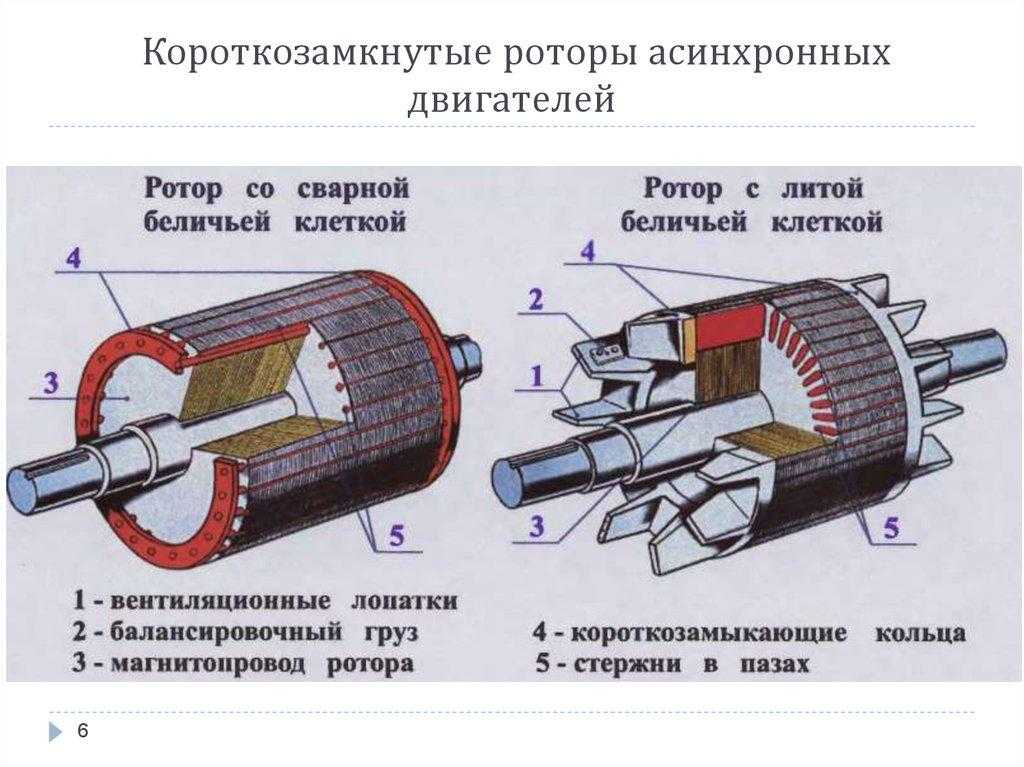 Большинство основных видов описаны ниже.
Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки.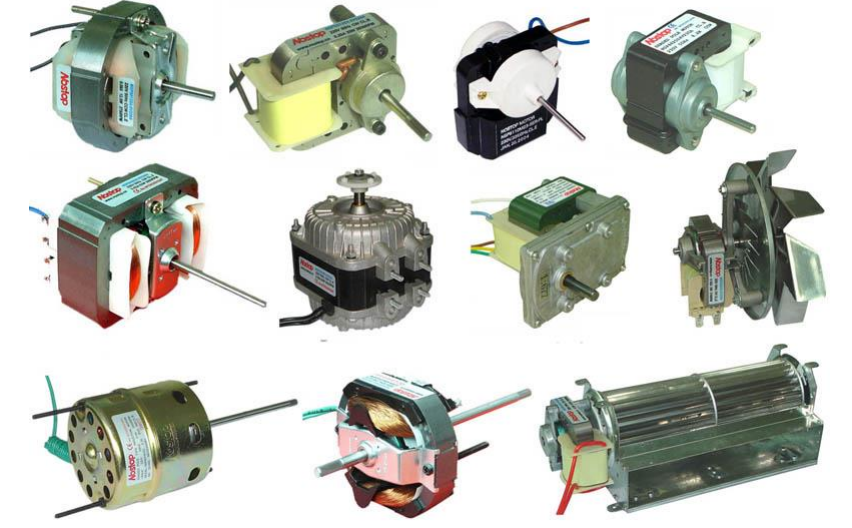 В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора.
В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Энергия и ископаемое топливо
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера.


 Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.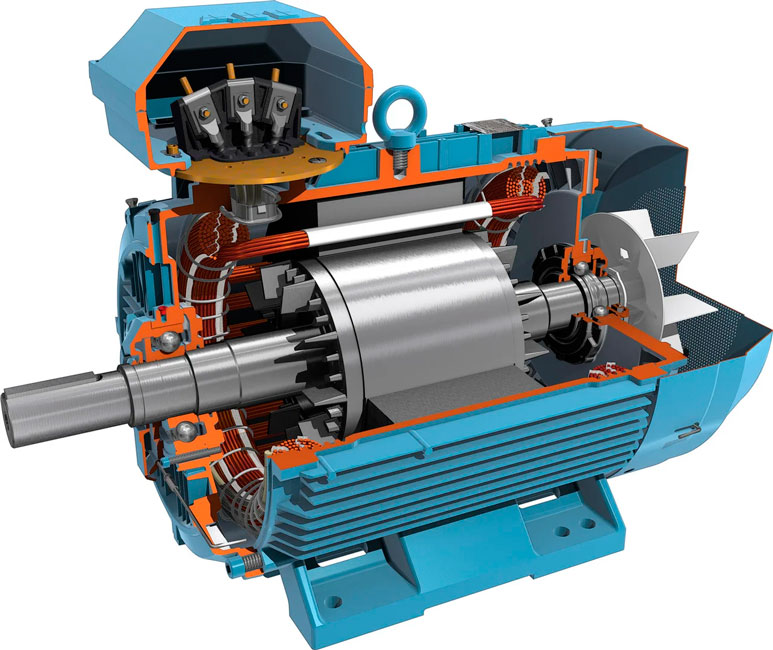
 Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.






 Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.
Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.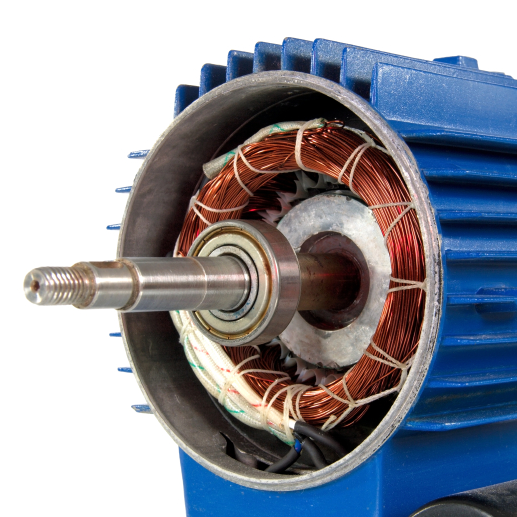 Соответственно, их можно классифицировать по различным признакам.
Соответственно, их можно классифицировать по различным признакам.  Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 .
Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 . 





 Большинство основных видов описаны ниже.
Большинство основных видов описаны ниже. В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора.
В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора.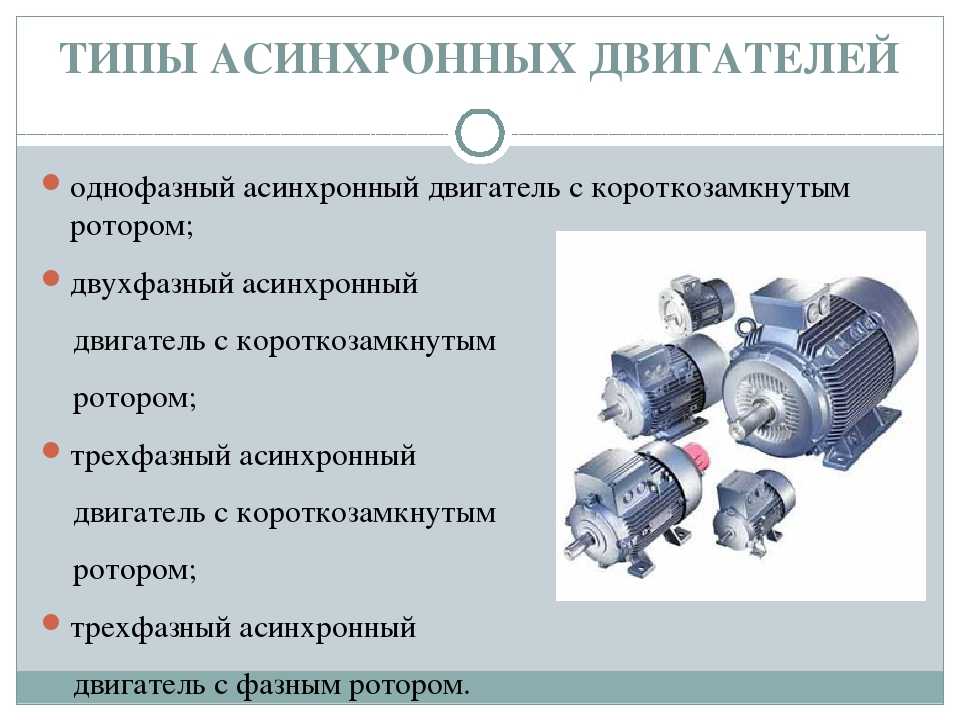 Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.