Тонкости настройки преобразователя частоты | Техпривод
Любой частотный преобразователь имеет ряд настроек, позволяющих задать необходимый режим разгона и торможения электродвигателя. В статье мы расскажем, какими параметрами можно управлять и как их оптимизировать, чтобы избежать поломки оборудования.
Основные параметры разгона/торможения двигателя
Минимальная выходная частота. Параметр, определяющий значение частоты, при котором начинается вращение двигателя. Повышенная минимальная частота во многих случаях позволяет уменьшить нагрев двигателя при разгоне.
Нижний предел выходной частоты. Этот параметр ограничивает частоту на выходе преобразователя. Нижний предел не может быть меньше минимальной выходной частоты. Данная настройка необходима для обеспечения защиты двигателя и механизмов в случае ошибочной установки минимальной рабочей частоты.
Максимальная выходная частота. Параметр ограничивает выходную частоту сверху. Причем заданное (номинальное) значение частоты может быть меньше, либо равным максимальной выходной частоте. Данное значение используется для расчета теоретического времени разгона, а также привязывается к максимальному значению управляющих сигналов на аналоговых входах.
Причем заданное (номинальное) значение частоты может быть меньше, либо равным максимальной выходной частоте. Данное значение используется для расчета теоретического времени разгона, а также привязывается к максимальному значению управляющих сигналов на аналоговых входах.
Частота максимального напряжения (номинальная частота двигателя). Этот параметр задается в соответствии со значением, указанным на шильдике электродвигателя. Как правило, оно равно 50 Гц. При такой частоте на двигателе действует максимально возможное для данного преобразователя напряжение. Если данный параметр выставить меньше необходимого, то двигатель будет работать с перегрузкой и никогда не разгонится до номинальной частоты.
Время разгона. Основной параметр, определяющий расчетное время, за которое электродвигатель разгонится от нулевой до максимальной выходной частоты. Темп нарастания, как правило, линейный, если не задано квадратичное изменение частоты. В случае, если нарастание задается в промежуточном диапазоне (не от нулевой и не до максимальной частоты), реальное время будет меньше заданного.
Например, если минимальная выходная частота равна нулю, а максимальная – 50 Гц, то при установке времени разгона 10 сек и максимальной выходной частоте 25 Гц фактическое время разгона будет в 2 раза меньше, т.е. 5 сек. То же относится и к торможению.
Инерция нагрузки
На реальное время разгона и замедления также влияют различные механические и электрические параметры системы электропривода. Например, при установке очень малого времени разгона или торможения фактическое время может быть больше из-за инерции нагрузки на валу двигателя.
Инерция нагрузки при разгоне может привести к перегрузке по току, при этом преобразователь частоты выходит в ошибку. Чтобы такого не произошло, время разгона нужно выбирать по нескольким критериям. Если данный параметр не принципиален, можно выставить автоматический разгон. В этом случае преобразователь будет выбирать максимальный скоростной режим разгона или замедления, чтобы избежать ошибки перегрузки по току (разгон) или перенапряжению на звене постоянного тока (замедление).
Когда время торможения должно быть минимальным, применяют тормозные резисторы для выделения «лишней» энергии, полученной в результате торможения.
Дополнительная инерция при разгоне и торможении может проявляться также при аналоговом способе задания выходной частоты. Это происходит, когда на аналоговом входе устанавливается низкочастотный фильтр для уменьшения помех, либо в настройках выставлена большая инерционность задающего аналогового сигнала.
Производители рекомендуют ограничить число пусков/остановов двигателя в единицу времени, поскольку при разгоне и торможении происходит наибольшая тепловая нагрузка на частотный преобразователь.
Во многих ПЧ имеется несколько вариантов времени разгона и торможения, которые можно применить для различных этапов технологического процесса. Переключение производится посредством подачи сигнала на соответственно запрограммированный дискретный вход.
Параметры на примере преобразователя Prostar PR6100
В частотном преобразователе Prostar PR6100 параметры настройки разгона/торможения находятся в меню и имеют следующие обозначения:
- Р0.
 06 – верхний предел частоты
06 – верхний предел частоты - Р0.07 – нижний предел частоты
- Р0.14 – время разгона
- Р0.15 – время торможения
- Р1.03 – номинальная частота двигателя
Другие полезные материалы:
Использование тормозных резисторов с ПЧ
Назначение сетевых и моторных дросселей
Настройка преобразователя частоты для работы на несколько двигателей
Назначение и виды энкодеров
Как подключить частотный преобразователь к электродвигателю — основные этапы
19938
Частотный преобразователь — это высокотехнологичный прибор с широкими возможностями. Подключение частотного преобразователя помогает автоматизировать различные производственные процессы, получить существенную экономию электроэнергии и заметно продлить ресурс оборудования.
Микропроцессорная база и встроенные компьютерные технологии делают прибор очень гибким по функционалу. Выбор комбинаций огромен, но для начала частотный преобразователь необходимо правильно подключить и настроить.
Установка частотника
Ошибки при подключении двигателя через частотный преобразователь способны значительно снизить срок его жизни и даже вывести электропривод из строя при первом же запуске. Важным этапом ввода в эксплуатацию является выбор предполагаемого места установки преобразователя. Необходимо учитывать комплекс условий, в числе которых:
- Возможности питающей линии.
- Диапазон рабочих температур.
- Влажность.
- Вибрации.
- Наличие агрессивных сред (какой класс защиты IP требуется).
Частотник можно монтировать вдали от электродвигателя. Но есть нюансы с длиной кабеля. Чтобы избежать появления эффекта отраженной волны, перенапряжения и коронного заряда, длину питающего кабеля следует ограничить. При периоде ШИМ от 0,3 мс — не более 45 м, при ШИМ 0,1 мс — не более 16 м.
Если двигатель специально предназначен для работы совместно с преобразователем, то длина кабеля может быть любой.
Подключение частотного преобразователя к электродвигателю следует производить строго по инструкции производителя. Особенно внимательно нужно отнестись к подключению силовой части. Перед прибором необходимо установить автоматический выключатель, работающий с током ≥ номинальному потребляемому току электродвигателя. Входные клеммы должны быть подключены только к фазам питающей сети (заземление только к заземляющему контуру), а выходные клеммы — к питаемому электродвигателю. В компании «Веспер» разработаны наглядные схемы и даны подробные инструкции к каждой модели. Например, схема подключения частотного преобразователя «Веспер E4-8400»:
Сетевые технологии для управления
Настройка частотника и программирование режимов работы осуществляется непосредственно с панели управления, выносного пульта или, что наиболее удобно, с помощью компьютера. Операционное место может находиться за многие километры от ПЧ, для этого необходимо воспользоваться сетевыми технологиями.
Операционное место может находиться за многие километры от ПЧ, для этого необходимо воспользоваться сетевыми технологиями.
Для совместной работы электродвигателя и системы автоматического управления используются различные протоколы передачи данных. Наибольшее распространение получил протокол связи Modbus с интерфейсом RS-485. Передача управляющего сигнала в линиях RS-485 осуществляется по проводу. Даже если сразу не требуется включать частотник в систему удаленного управления, на перспективу такой вариант подключения следует предусмотреть и заранее запланировать место, где удобнее проложить магистраль и подключиться к сети.
ПЧ — органы управления
Преобразователи «Веспер» оборудованы панелью с информационным ЖК-дисплеем и набором для управления и проведения пусконаладки. В зависимости от модели ПЧ, дисплеи могут отличаться количеством строчек. На дисплей прибора можно выводить данные о текущем состоянии параметров.
Для большего удобства и реализации более сложных систем управления через аналоговые и дискретные (релейные, транзисторные) выходы можно подключить выносной ДУ-пульт.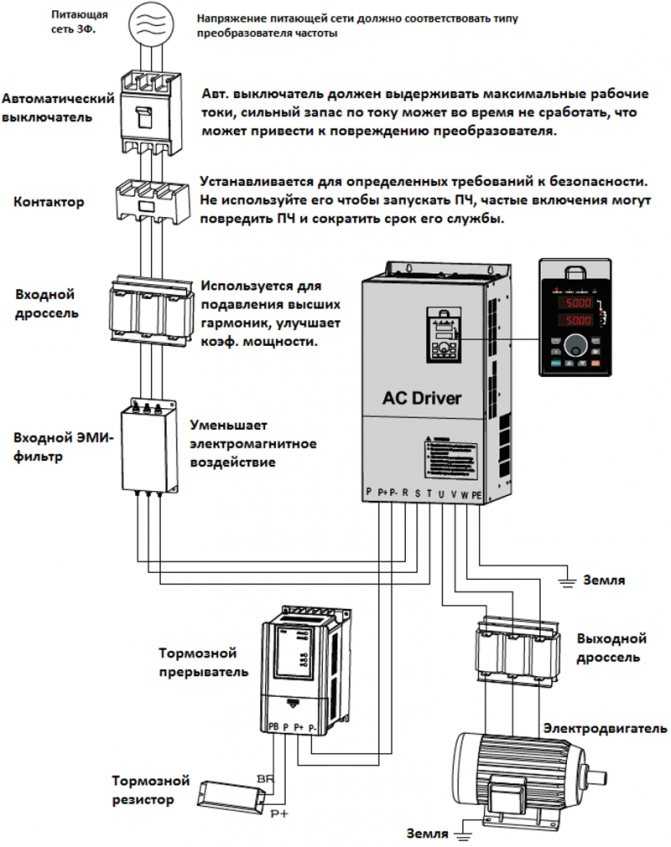 А через линию интерфейсной связи — ПК (ноутбук или стационарный).
А через линию интерфейсной связи — ПК (ноутбук или стационарный).
Ноутбук можно использовать в режиме осциллографа — для наблюдения за изменениями параметральных величин в реальном времени. В таком случае также необходимо заранее подготовить место с изолированной поверхностью и предусмотреть возможность работы ноутбука от батареи.
Настройка перед запуском
Частотные преобразователи — сложные компьютеризированные устройства со множеством функций и настроек. Чтобы облегчить и ускорить ввод прибора в эксплуатацию, на заводе уже проведены базовые настройки. При этом многие параметры «по умолчанию» могут быть оптимальными для решения поставленных задач.В дополнение к базовым настройкам, преобразователи «Веспер» поддерживают функцию автонастройки — идентификационный пуск. В этом режиме ПЧ до запуска двигателя или уже у работающего двигателя автоматически определяет параметры обмоток.
Перед запуском также необходимо проверить и задать стартовый набор параметров:
- Характеристики управляемого двигателя — напряжение, мощность, рабочий диапазон частоты вращения (эти параметры можно посмотреть в технической документации или на шильдике двигателя).

- Канал задания — указать, из какого источника ПЧ следует брать задания (панель управления, дискретные/аналоговые выходы, удаленный интерфейс).
- Канал управления — указать, откуда будут поступать управляющие команды (запуск/остановка). В качестве управляющего канала можно выбрать: панель управления, дискретные/аналоговые выходы, удаленный интерфейс.
- Схема преобразования — если нет опыта, эту настройку лучше не менять, оставить по умолчанию.
Строго следуя инструкции и обладая базовыми знаниями, можно самостоятельно разобраться с тем, как подключить частотный преобразователь к электродвигателю. Но если нет желания или времени во все вникать — поручите это высококвалифицированным сотрудникам «Веспер». Они проведут пусконаладочные работы быстро и профессионально.
Видео
Вступительный фильм о типовых примерах применения преобразователей частоты Веспер. В видеоролике показаны преимущества использования частотно-регулируемого электропривода по отношению к другим типам приводов. Коротко представлена продукция нашей компании и география ее использования.
Коротко представлена продукция нашей компании и география ее использования.
Теория двигателя 101: Регулировка частоты
Инь, 31 октября 2014 г.
- #Мотор
Это Не секрет, что в разных частях света используются разные частоты. В Америке мы используем частоту 60 Гц, а в Европе вы найдет частоту 50 Гц. Может показаться, что разница невелика, но изменение частоты на двигателе может привести к большим изменениям в том, как мотор будет работать.
При изменении частоты двигателя сила магнитов внутри двигателя изменится. Это
потому что сила магнита двигателя напрямую связана с его
частота и напряжение. Так что же происходит с двигателем, когда вы меняете его
магнитная сила? Если сила магнита слишком слаба, двигатель
станет слабым и не сможет обеспечить достаточный крутящий момент. В
Напротив, если сила магнита слишком велика, железо в
двигатель станет насыщенным, что приведет к перегреву двигателя и, в конечном итоге,
неудача. Чтобы лучше понять это, давайте взглянем на некоторые основные двигатели.
теория ниже:
В
Напротив, если сила магнита слишком велика, железо в
двигатель станет насыщенным, что приведет к перегреву двигателя и, в конечном итоге,
неудача. Чтобы лучше понять это, давайте взглянем на некоторые основные двигатели.
теория ниже:
Хотя
Частота в Европе отличается от 60 Гц, которые мы используем в Америке.
магнитный поток останется прежним, потому что напряжение, которое они используют, равно
пропорциональна герцам (т.е. они используют более низкую частоту, но они
также используйте более низкое напряжение). Представьте на мгновение, что Европа и Америка
не единственные, использующие разные частоты и напряжения. Фактически,
представьте, на Марсе используют 230 В и 30 Гц.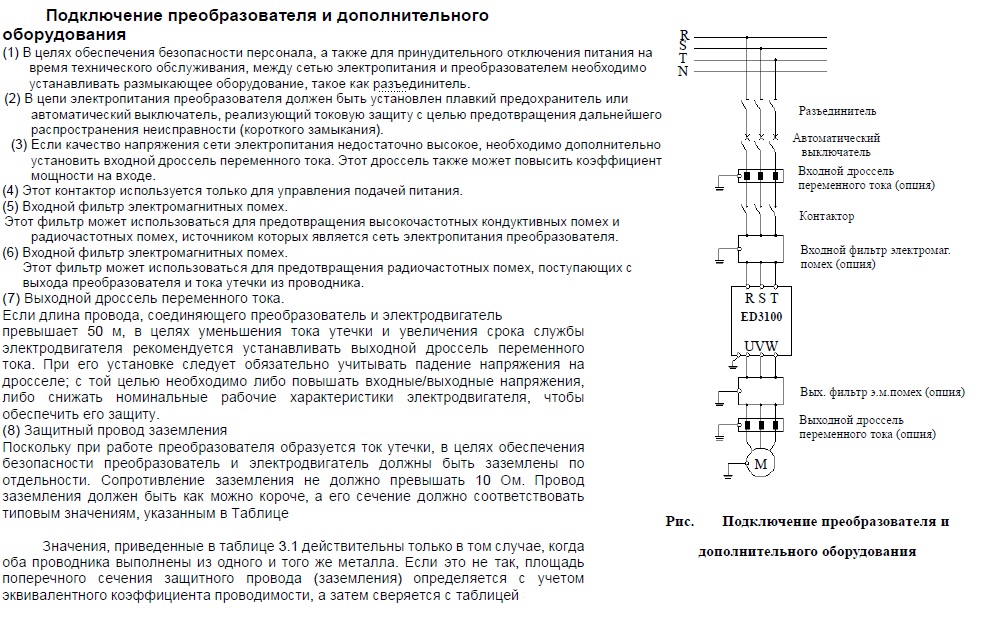 Как бы 10 л.с., 1800 об/мин
двигатель, рассчитанный на использование с напряжением 460 В и частотой 60 Гц, работает на Марсе?
Как бы 10 л.с., 1800 об/мин
двигатель, рассчитанный на использование с напряжением 460 В и частотой 60 Гц, работает на Марсе?
Если мы используя нашу теорию магнитной силы выше, мы знаем, что двигатель 460 В при работе на частоте 60 Гц отношение В/Гц составляет около 7,6. Мы также знаем из нашего формула, что на Марсе тот же двигатель, использующий 230 В, 30 Гц, также имеет В/Гц около 7,6.
460 В/60 Гц = 7,6
230 В/30 Гц = 7,6
Если
Вы предполагаете, что двигатель с частотой 30 Гц будет иметь половину скорости двигателя с частотой 60 Гц.
двигатель, то из этого следует, что двигатель с частотой 60 Гц и частотой вращения 1800 об/мин будет
иметь обороты 900 на Марсе. Используя нашу формулу мощности, приведенную выше,
мы знаем, что мощность измеряется крутящим моментом и скоростью. Мы также знаем
этот крутящий момент напрямую связан с магнитной силой двигателя.
Поскольку магнитная сила на Марсе одинакова, крутящий момент останется
одинаковый. Однако скорость изменилась, а значит и мощность в лошадиных силах
рейтинг изменится для нашего двигателя, когда он будет работать на Марсе.
Однако скорость изменилась, а значит и мощность в лошадиных силах
рейтинг изменится для нашего двигателя, когда он будет работать на Марсе.
Сохранить Имейте в виду, что этот двигатель рассчитан на 10 л.с. и 1800 об / мин, когда он используется. с 460 В и 60 Гц в Америке. Используя нашу формулу для определения лошадиных сил на Марсе, мы знаем, что если крутящий момент (измеряемый в ft-lb) у нашего мотора 30, а оборотов на марсе 900, мощность будет около 5.1.
30 x 900 / 5252 = 5,1 лошадиных сил
Сейчас
мы знаем, что на Марсе нет никаких электрических систем, дело в том,
чтобы продемонстрировать идею о том, что мощность, частота и скорость двигателя
все можно изменить. Одной константой во всех этих параметрах является полная нагрузка двигателя.
Номинал усилителя (FLA). FLA является одним из немногих измерений, которые
оставаться неизменным, несмотря на любые изменения частоты и напряжения, что делает его
надежное измерение размера частотно-регулируемого привода.
Когда вы используете VFD на своем двигателе, вы можете использовать тот же процесс изменения частота и напряжение для управления скоростью двигателя — только это время, вы будете в контроле. Хорошей новостью является то, что вы не нужно лететь до Марса только для того, чтобы запустить двигатель на разная скорость и частота. Вы можете сделать это, где бы вы ни находились, используя ЧРП. VFD позволит вам генерировать ряд вариаций даже для «Марс» и обратно. Это может быть важно для приложений, которые требуют расширенные возможности управления, несколько остановок и запусков, а также приложений, которым нужна экономия энергии, которую может обеспечить только частотно-регулируемый привод.
Чтобы узнать больше о частотно-регулируемых приводах и о том, как они могут управлять скоростью двигателя, ознакомьтесь с сообщениями в нашем блоге под названием «Что такое частотно-регулируемый привод» и «Преимущества частотно-регулируемых приводов, инверторов и приводов», а также с другими информационными сообщениями. доступно на сайте www.vfds.com/blog.
доступно на сайте www.vfds.com/blog.
Включите JavaScript для просмотра комментариев с помощью Disqus.
Как преобразователь частоты управляет скоростью двигателя?
1. Почему можно свободно изменять скорость вращения преобразователя частоты?
Скорость вращения асинхронного двигателя переменного тока приблизительно определяется количеством полюсов и частотой двигателя. Количество полюсов двигателя определяется принципом работы двигателя. Поскольку значение числа полюсов не является постоянным значением, обычно не рекомендуется регулировать скорость двигателя путем изменения этого значения. Кроме того, частоту можно регулировать вне двигателя, а затем подавать на двигатель, чтобы можно было свободно регулировать скорость вращения двигателя. Следовательно, преобразователь частоты для управления частотой является предпочтительным устройством в качестве устройства регулирования скорости двигателя.
Если изменить только частоту без изменения напряжения, двигатель будет находиться в состоянии перенапряжения при снижении частоты, что может привести к перегоранию двигателя. Поэтому инвертор преобразователя частоты должен изменять напряжение одновременно с изменением частоты. Когда выходная частота выше номинальной частоты, напряжение не может продолжать увеличиваться, и максимальное значение может быть только равно номинальному напряжению двигателя.
Поэтому инвертор преобразователя частоты должен изменять напряжение одновременно с изменением частоты. Когда выходная частота выше номинальной частоты, напряжение не может продолжать увеличиваться, и максимальное значение может быть только равно номинальному напряжению двигателя.
2. Что произойдет с выходным крутящим моментом при изменении скорости вращения и частоты преобразователя частоты?
Пусковой и максимальный крутящий момент при работе от преобразователя частоты меньше, чем при работе от источника питания промышленной частоты. Когда двигатель питается от источника питания промышленной частоты, толчки при пуске и ускорении велики, но когда в качестве источника питания используется преобразователь частоты, эти толчки слабее. Прямой запуск промышленной частоты будет генерировать большой пусковой ток, а при использовании инвертора выходное напряжение и частота инвертора постепенно добавляются к двигателю, поэтому пусковой ток и воздействие двигателя меньше. Обычно крутящий момент, создаваемый двигателем, следует уменьшать с уменьшением частоты, и фактические данные о снижении объясняются в некоторых руководствах по инверторам. Используя инвертор, управляемый вектором магнитного потока, недостаточный крутящий момент двигателя на низкой скорости будет улучшен, и двигатель может выдавать достаточный крутящий момент даже в области низкой скорости.
Обычно крутящий момент, создаваемый двигателем, следует уменьшать с уменьшением частоты, и фактические данные о снижении объясняются в некоторых руководствах по инверторам. Используя инвертор, управляемый вектором магнитного потока, недостаточный крутящий момент двигателя на низкой скорости будет улучшен, и двигатель может выдавать достаточный крутящий момент даже в области низкой скорости.
3. Когда преобразователь частоты настроен на частоту выше 50 Гц, выходной крутящий момент двигателя уменьшится. этот диапазон напряжений. Поэтому регулирование скорости ниже номинальной частоты называется регулированием скорости с постоянным крутящим моментом. Когда выходная частота инвертора превышает 50 Гц, крутящий момент, создаваемый двигателем, должен уменьшаться по линейной зависимости, обратно пропорциональной частоте. Когда двигатель работает с частотой выше 50 Гц, необходимо учитывать размер нагрузки двигателя, чтобы предотвратить недостаточный выходной крутящий момент двигателя.
4. Применение преобразователя частоты выше 50 Гц
Для конкретного двигателя его номинальное напряжение и номинальный ток являются постоянными. Если номинальное значение инвертора и двигателя: 15 кВт/380 В/30 А, двигатель может работать на частоте выше 50 Гц. При скорости 50 Гц выходное напряжение инвертора составляет 380 В, а ток — 30 А. В это время, если выходная частота увеличивается до 60 Гц, максимальное выходное напряжение и ток инвертора могут составлять только 380 В/30 А. Очевидно, что выходная мощность остается неизменной, поэтому мы называем это регулированием скорости при постоянной мощности.
5. Другие факторы, связанные с выходным крутящим моментом преобразователя частоты
Мощность нагрева и охлаждения определяет выходной ток инвертора, тем самым влияя на выходной крутящий момент инвертора.
(1) Несущая частота: Как правило, номинальный ток инвертора — это значение, которое может гарантировать непрерывную выходную мощность при самой высокой несущей частоте и самой высокой температуре окружающей среды.